Обязательным этапом обработки радиолокационной информации является глазомерная оценка ситуации. Она осуществляется после обнаружения эхо-сигнала другого судна (объекта) на экране РЛС, предшествует радиолокационной прокладке и прекращается до полного расхождения.
При большом количестве эхо-сигналов других судов (объектов), превышающем возможности их обработки вручную, глазомерная оценка ситуации позволяет отобрать для радиолокационной прокладки опасные и потенциально опасные цели.
 Опасной целью принято называть другое судно (объект), перемещение эхо-сигнала которого в соответствии с установленными критериями опасности вызывает необходимость выполнения маневра для расхождения.
Опасной целью принято называть другое судно (объект), перемещение эхо-сигнала которого в соответствии с установленными критериями опасности вызывает необходимость выполнения маневра для расхождения.
Под потенциально опасной целью подразумевают другое судно, перемещение эхо-сигнала которого в соответствии с установленными критериями опасности в данный момент не требует маневра для расхождения, но такой маневр может стать необходимым при дальнейшем сближении, при неблагоприятном маневре другого судна или после выполнения нашего маневра для расхождения с опасными целями.
Для определения реальной опасности цели по первичной информации направление следа послесвечения, тенденции изменения пеленга и дистанции, DKp и другие параметры сравнивают с критериями опасности:
а) эхо-сигналы, обнаруженные впереди траверза, требуют большего внимания, так как среди них более вероятны сигналы опасных цепей, время сближения с которыми мало из-за большой относительной скорости;
б) в большинстве ситуаций чем ближе эхо-сигнал, тем цель опаснее, так же как чем ближе направление следа послесвечения к началу развертки, тем цель опаснее;
в) если направление следа послесвечения проходит на DKp меньшем установленной
величины, степень опасности цели определяется на основе известных закономерностей
перемещения эхо-сигналов с учетом возможных маневров нашего судна.
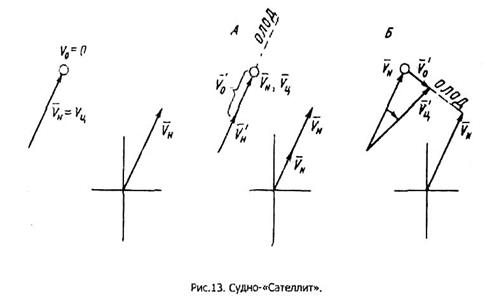
Так при перемещении эхо-сигналов параллельно линии нашего курса более опасной будет цель, эхо-сигнал которой пройдет в той стороне от начала развертки, в которую возможен отворот нашего судна (рис. 14).
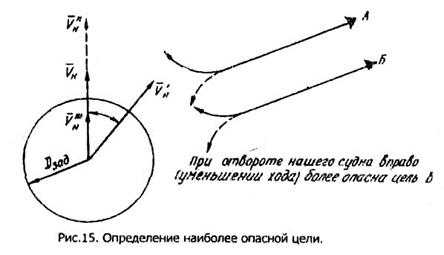
При перемещении эхо-сигналов непараллельно линии нашего курса степень опасности цели будет зависеть также и от возможного изменения нашей скорости (рис. 15);

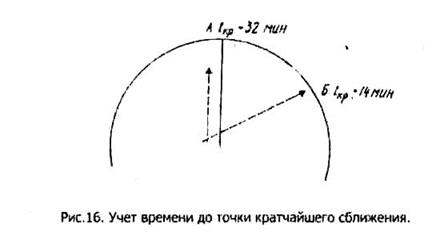
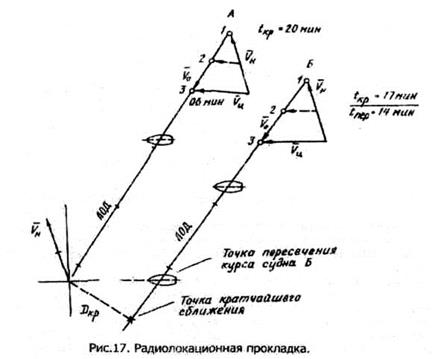
г) величина tкр. помогает правильно оценить развитие ситуации во времени с тем, чтобы действовать заблаговременно. В ситуации на рис. 16, если ориентироваться только на дистанции до целей, можно сделать неправильный вывод о большей опасности цели А в сравнении с целью Б, так как цель А ближе. Анализ ситуации с учетом tкр показывает истинную картину: цель А является потенциально опасной, так как tкр = 32 мин. и с маневром на расхождение можно повременить.
Цель Б (tкр=14 мин) - опасное судно, требуется незамедлительное маневрирование для расхождения с ним.
Радиолокационная прокладка.
Радиолокационная прокладка (ручная или автоматизированная) представляет собой графоаналитический метод обработки радиолокационной информации при решении задачи расхождения судов.
Различают истинную и относительную радиолокационные прокладки.
Истинная прокладка обычно выполняется на навигационной карте. От счислимых мест своего судна откладывают измеренные пеленг и дистанцию цели, получая ее одномоментные местоположения. По ним определяют курс и скорость цели, а также путем более сложных построений Dкр. и tкр. для оценки степени опасности столкновения.
Относительная прокладка выполняется на радиолокационном маневренном планшете, на накладном зеркальном планшете, которым оборудованы некоторые модели РЛС, в также во всех САРП (в САРП, как правило, в сочетании с истинной прокладкой).
Относительная прокладка выполняется следующим образом:
а) на маневренный планшет наносится начальная ситуация (рис. 17):
положение цели (целей) на начальный момент времени по первым измерениям пеленга и дистанции;
положение цели (целей) через избранный интервал времени (обычно 3 или 6 мин) по
вторым измерениям пеленга и дистанции и, если позволяют обстоятельства;
положение цели (целей) через тот же интервал времени по третьим измерениям пеленга и дистанции (последние измерения должны предупредить промах);
б) параллельно с нанесением начальной ситуации начинают обработку радиолокационных измерений на планшете: уже после получения первого положения цели — точки 1 наносят вектор нашей скорости VH за соответствующий период времени;
через точки 1-2-3 после их нанесения проводят ЛОД цели. Соединяют точки 1 - 3, получая вектор относительной скорости V0 — основной информационный элемент;
соединив начало вектора нашей скорости с точкой 3, определяют вектор скорости цели Уц, т. е. завершают решение векторного треугольника (векторы VH, V0 и Vц должны быть за одинаковый интервал времени);
в) получают данные для оценки ситуации: Dкp. определяют по длине перпендикуляра из центра планшета на ЛОД;
tкр. рассчитывают, откладывая по ЛОД отрезки, равные V0, так как они соответствуют
интервалу времени 1-3;
если ЛОД проходит у нас по носу, определяют точку пересечения целью нашего курса, а если ЛОД проходит у нас по корме, — точку пересечения нашим судном курса цели (из центра планшета проводят линию, параллельную Vц, до пересечения с ЛОД);
tnep. рассчитывают аналогично tкр. до точки пересечения курса;
курс цели Кц Определяют по направлению вектора ее скорости, а скорость цели Vц — повеличине вектора Vц;
Таблица 1.
|
1
2
3
| Т
| кн
| УН
| А
| Б
|
|
|
| п/ку
| D
| п/ку
| D
| п/ку
| D
| п/ку
| D
|
| 0610
| 345
| 16,0
| 32
| 7,3
| 48
| 7.6
|
|
|
|
|
| 0613
| 345
| 16,0
| 32
| 6,5
| 50
| 6.7
|
|
|
|
|
| 0616
| 345
| 16,0
| 32
| 5,7
| 53
| 56
|
|
|
|
|
г) получив необходимые данные и используя линейные и временные факторы опасности (см. схему на рис. 1), оценивают ситуацию: определяют, имеется ли реальная или потенциальная опасность столкновения с каждой целью, и, если опасность существует, переходят к выбору и обоснованию маневра. На этом этапе должно быть определено, с кем следует расходиться, что для этого нужно сделать и когда выполнять маневр. Выбор и обоснование маневра будут рассмотрены ниже. Пока же достаточно отметить, что при этом учитывают условия и обстоятельства конкретного случая, требования МППСС-72, закономерности перемещения эхо-сигналов на экране РЛС и маневренные элементы своего судна;
д) для расчета выбранного маневра (по судну Б на рис. 18):
наносят на ЛОД упрежденную точку 1, соответствующую условному моменту окончания маневра (12 мин.);
проводят окружность радиусом заданной дистанции кратчайшего сближения Dзад.;
прокладывают ожидаемую линию относительного движения цели (ОЛОД),
Таблица 2.
|
4
5
| т
| Кн
| VH
| А
| Б
|
|
|
| п/ку
| D
| п/к
| D
| п/ку
| D
| п/ку
| I
|
| 0619
| 345
| 16,0
| 32
| 4,9
| 56
| 5,0
|
|
|
|
|
| 0621
|
| п/Б
| курс
| 64,0
|
|
|
|
|
|
|
| 0623
| 64
| 16,0
| 28
| 4,6
| 59
| 4,6
|
|
|
|
|
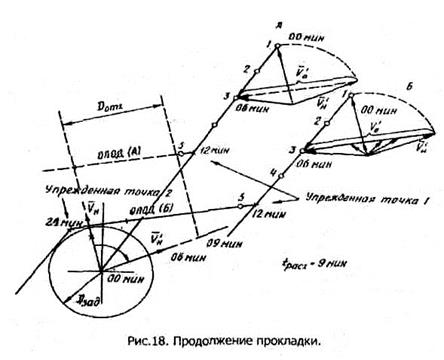
которая представляет собой касательную к окружности Dзад., проведенную из упрежденной
точки 1; из точки 3 векторного треугольника начальной ситуации проводят новое направление
вектора V’0 — оно всегда соответствует направлению ОЛОД — и делают на нем засечку
величиной VH определяя точку начала нового вектора относительной скорости V’0, новое
положение вектора VH, а также точное значение угла отворота, если выбран маневр изменением
курса.
Если же выбрано уменьшение скорости, новое значение вектора V’H определится отрезком V’H
до пересечения этого вектора с вектором V’0.
Из рис. 18 видно, что возможен и комбинированный маневр: из центра планшета проводят
новый вектор V'H, одновременно зачеркивая, чтобы не путаться, старый вектор VH;
е) пригодность рассчитанной величины маневра для расхождения с другими целями на
безопасной дистанции проверяется (на рис. 18 по судну А) следующим образом: прокладывают
новое значение V'H в векторном треугольнике каждой цели и упрежденную точку на всех ЛОД;
определяют новое значение V’0;
через упрежденную точку параллельно V’0 проводят ОЛОД и оценивают величину дистанции
кратчайшего сближения, которая должна быть не меньше Dзад.;
ж) рассчитывают время расхождения tpacx. и дистанцию отхода от первоначального пути Dотх.,
используя новое значение V0:
находят упрежденную точку 2 условного момента возвращения на первоначальный путь
следования (21 мин), для чего проводят касательную к окружности Dзад. параллельную ЛОД, и
точку пересечения этой касательной с ОЛОД, которая и есть упрежденная точка 2;
рассчитывают tpacx., откладывая величину V0 по ОЛОД до упрежденной точки 2;
определяют Dотх., для чего по линии нового курса V’H откладывают расстояние, которое
пройдет наше судно за время tpacx. Из конечной точки этого плавания опускают перпендикуляр
на линию первоначального курса — он и есть Dотх.;
з) рассчитывают момент начала маневра с учетом маневренных элементов своего судна
вычитают из условного момента упрежденной точки (п. 2.4.4д) 2/з известного из Таблиц
маневренных элементов времени маневра.
Радиолокационная прокладка на зеркальном планшете аналогична прокладке на
маневренном планшете.
На поверхности зеркального планшета специальным карандашом-стеклографом отмечают
через избранный интервал времени положения эхо-сигналов целей. Дальнейшие графические
построения выполняют в полном соответствии с изложенным выше.
Принципиальные достоинства зеркального планшета: радиолокационное наблюдение,
глазомерную оценку ситуации и графическую прокладку выполняет один человек; исключается
необходимость выполнения радиолокационных измерений и переноса этих измерений на
планшет, с чем связана возможность промаха.
Принципиальными недостатками зеркального планшета являются: параллакс; некоторая
потеря качества изображения в зеркальном отражении;
отрыв нанесенной прокладки от реальных эхо-сигналов при переключении шкал дальности
РЛС.
Полная оценка ситуации.
Полная оценка ситуации — важный этап обработки радиолокационной информации,
обобщающий результаты визуального, слухового и радиолокационного наблюдения, всю
первичную и вторичную радиолокационную информацию, полученную из глазомерной оценки,
ручной или автоматизированной прокладки, конкретные навигационно-гидрографические и
гидрометеорологические условия данного момента, требования МППСС-72.
Основной задачей полной оценки ситуации является обоснование необходимости и вида
маневра для расхождения, т. е. получение ответов на вопросы: с кем расходиться? Что делать?
Когда маневрировать?,
Выбор и обоснование маневра в ситуации с несколькими целями выполняют этапами
(приближениями), которые удобно рассмотреть на конкретном примере. Вернемся к ситуации на
рис. 18 и воспроизведем ход рассуждений.
а) Сначала судоводитель, глядя на векторы целей и представляя за ними ракурсы судов,
воспроизводит в пространственном воображении существующую ситуацию и возможные
маневры своего судна для предотвращения опасного сближения судов. Очевидно, сразу же из
перечня возможных маневров исключается отворот влево, так как он связан с опасным
пересечением курсов обоих судов. В то же время отворот вправо возможен, если этому маневру
не препятствуют навигационные или иные ограничения. Проход между судами при имеющемся
пространстве рискован и будет противоречить хорошей морской практике. Если имеются помехи
изменению курса вправо, обосновывают маневр уменьшением скорости или комбинированный.
Наконец, анализируя ситуацию, делаем логический вывод, что любой из рассмотренных
видов маневра следует рассчитывать относительно судна Б, ситуация с которым более сложна.
б) Логика рассуждений проверяется графическим анализом. Из рис. 19 видно, что любой из
выбранных видов маневра обеспечивает улучшение ситуации с судном А, так как отворот ЛОД
приводит к увеличению Дкр.
В то же время ситуация относительно судна Б первоначально будет ухудшаться,
понадобятся значительные по величине маневры для улучшения ситуации, а это указывает на
то, что основное внимание при расчете маневров следует действительно уделить судну Б. Таким
образом, в первом приближении получен ответ на вопрос, с кем расходиться.
в) Выводы о судне, относительно которого следует рассчитывать маневр, и виде маневра
для расхождения должны быть логически увязаны с временными факторами опасности tкp. и tnep. с
учетом взаимного положения судов.
В нашей ситуации любой из выбранных видов маневра обеспечивает, когда бы он ни был
выполнен, улучшение ситуации с судном А.
В то же время задерживаться с маневром относительно судна Б нельзя, так как с каждой
минутой наше судно приближается к линии курса этого судна и для расхождения будет
требоваться все больший отворот или все меньшая скорость.
г) Графический анализ ситуации (рис. 20) доказывает, что для расхождения с судном А даже
за пределами заданной дистанции достаточно отвернуть вправо на 80° или уменьшить ход до
1/4 , VH на 18-й минуте.
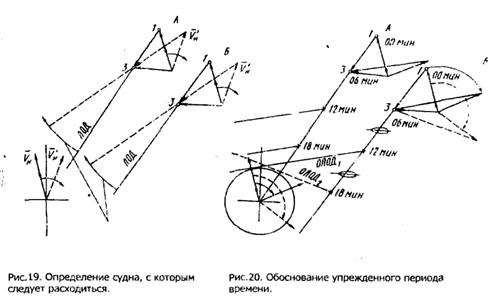
В то же время для расхождения с судном Б при его ракурсе такие же отворот или
уменьшение скорости следует выполнить до 12-й минуты, т. е. в условиях довольно жесткого
дефицита времени. Дальнейшая задержка с маневром потребует вдвое большего отворота
вправо, а расхождение уменьшением скорости вообще не обеспечивается, так как наше судно
будет на пути судна Б. Таким образом, в первом приближении получен ответ на вопрос, когда
расходиться.
д) При выборе и обосновании маневра определяется реальность назначенных величин 0ЯЛ1
dotx и других критериев. Например, определение дистанции отхода после маневра изменением
курса позволяет проверить пригодность выбранного маневра с навигационной точки зрения, так
как пространства для маневрирования может не хватить и от этого вида маневра придется
отказаться.
е) Если в результате выполненного анализа предположения, основанные на логических
рассуждениях и качественных оценках, не подтвердятся, судоводитель должен от них
отказаться и искать другое решение задачи.






