Современные литьевые машины (ЛМ) представляют собой сложные технические устройства, оснащенные разнообразными средствами автоматизированного управления параметрами технологического процесса. Нередко их называют термопластавтоматами (ТПА) или реактопластавтоматами (РПА) в зависимости от вида основного перерабатываемого материала.
Кроме того, ЛМ подразделяются по технологическим и основным конструктивным признакам:
по способу пластикации — на одно-, двухчервячные, поршневые и червячно-поршневые;
по особенностям пластикации — на ЛМ с совмещенной и раздельной пластикацией (предпластикацией);
по количеству пластикаторов — с одним, двумя и более пластикационными узлами;
по числу узлов запирания формы (узлов смыкания) — одно-, двух- и многопозиционные (ротационные, карусельные);
по конструкции привода — электро- и гидромеханические, электрические;
по расположению оси цилиндра узла пластикации и плоскости разъема литьевой формы — горизонтальные, вертикальные, угловые (рис. 10.2).

Угловые ЛМ используются для литья крупных изделий с затрудненным извлечением из формы. Возможны два типа таких машин:
— с горизонтальным пластикатором и вертикальным разъемом формы;
— с горизонтальным разъемом формы и вертикальным узлом инжекции. Вертикальные ЛМ наиболее удобны при производстве некрупных, в том числе армированных, деталей (обычно до 0,5 кг) в съемных формах.
Конструкции литьевых машин
Конструкции литьевых машин весьма разнообразны. Основными классификационными признаками ЛМ являются усилие запирания формы (кН), то есть смыкания формы, создаваемое прессовым блоком, и объем впрыска, выражаемая числом кубических сантиметров расплава, которые могут быть подготовлены машиной для однократной подачи в литьевую форму. Выпускаемые промышленностью серийные литьевые машины, как правило, объединены в типоразмерные ряды по этим двум параметрам.
Конструкция литьевых машин определяет процессы пластикации и формования полимеров, возможность реализации различных технологических режимов изготовления изделий, их качество, а также их технико-экономические показатели. Конструкции литьевых машин весьма разнообразны, но каждая из них включает основные узлы:
- узел пластикации и впрыска, состоящий из устройства для дозирования материала, пластикации его в материальном цилиндре, а затем впрыска за счёт гидроцилиндра;
- узел запирания, включающий устройство для перемещения литьевой формы, удержания её в сомкнутом состоянии и выталкивания отливки из полости формы;
- аппаратуру для управления технологическими режимами;
- устройства, обеспечивающие безопасность работы (блокировки механические, электрические).
Назначение механизма пластикации и впрыска состоит в выполнении следующих технологических операций:
- набор и пластикация дозы перерабатываемого материала;
- впрыск расплава и выдержка его под давлением в форме до затвердевания материала в литнике.
Механизмы, осуществляющие эти технологические операции, могут быть конструктивно соединены или разобщены.
Наиболее современной и рациональной является схема червячно-поршневой пластикации в одну линию, обеспечивающая высокую точность дозирования и высокую производительность, простоту конструкции и отсутствие мест застоя материала. Материал в червячных пластикаторах этой конструкции находится в непрерывном движении и поэтому непрерывно гомогенизируется. Прогрев материала осуществляется не только за счёт теплопередачи от нагретых стенок цилиндра, но и за счёт диссипативных тепловыделений при трении материала и его деформировании.
При расположении механизмов пластикации и впрыска в одну линию (рис. 51) червяк выполняет две функции: пластицирует и накапливает необходимую дозу расплава и впрыскивает расплав в форму.
Пластикационный цилиндр 1 укреплён на корпусе 9 механизма впрыска с помощью полуколец 6 и гайки 5. Вращение червяка 3 осуществляется от гидродвигателя 10 через червячную передачу 11, вал 8 и муфту 7. Осевые нагрузки при работе червяка воспринимаются упорным подшипником 14, установленном в поршне 15 гидроцилиндра 13. Расплав нагревается электронагревателями 4; температура расплава контролируется датчиками термопар 2 с терморегуляторами. Шпильки 12 крепят гидроцилиндр 13 к корпусу 9.
Гранулированный материал проходит через загрузочное отверстие А в зону загрузки червячного пластикатора и далее, продвигаясь по червяку при его вращении, превращается в расплав. Доза расплавленного материала скапливается в передней (сопловой) части пластикационного цилиндра 1, а червяк под давлением, возникающим в дозе материала, отходит вправо. При подаче жидкости из гидросистемы машины в поршневую полость гидроцилиндра 13 поршень 15 передвигается влево, сообщая осевое перемещение червяку 3, который впрыскивает дозу расплава в полость формы.
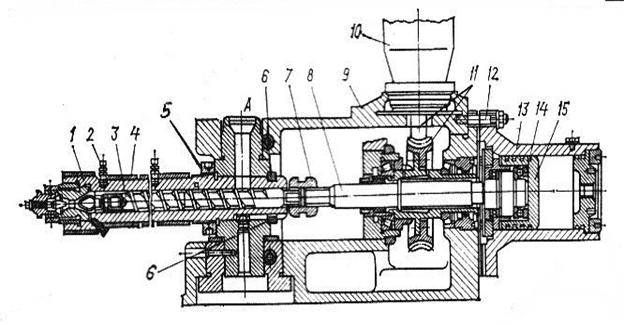
Рис. 51.
Мощность привода вращательного движения шнека можно определить по зависимости:

где  – крутящий момент на валу червяка;
– крутящий момент на валу червяка;
 – частота вращения червяка.
– частота вращения червяка.
В свою очередь можно определить по зависимости

где  – пластикационная производительность, кг/час,
– пластикационная производительность, кг/час,

где  – необходимая масса полимера,
– необходимая масса полимера,
 – время пластикации,
– время пластикации,
с – коэффициент, учитывающий свойства полимера ( ).
).
Мощность поступательного движения шнека  (кВт) рассчитывают из условия обеспечения необходимого для заполнения формы давления литья и скорости поступательного движения шнека:
(кВт) рассчитывают из условия обеспечения необходимого для заполнения формы давления литья и скорости поступательного движения шнека:

где  – давление, создаваемое насосом, МПа;
– давление, создаваемое насосом, МПа;
 – подача насоса, м 3/ с;
– подача насоса, м 3/ с;
 – КПД насоса и гидросистемы впрыска;
– КПД насоса и гидросистемы впрыска;
 – коэффициент перегрузки в зависимости от тина электродвигателя, давления и характера его изменения;
– коэффициент перегрузки в зависимости от тина электродвигателя, давления и характера его изменения;
 – давление литья, МПа;
– давление литья, МПа;
 ,
,  – площадь шнека и поршня гидроцилиндра впрыска, м 2.
– площадь шнека и поршня гидроцилиндра впрыска, м 2.
Подачу насоса , которая обеспечивает необходимую объемную скорость течения расплава в системе сопло — форма или заданное время впрыска (заполнения)  , при номинальном объеме впрыска за цикл
, при номинальном объеме впрыска за цикл  определяют следующим образом:
определяют следующим образом:
 если известна
если известна 
или
 если известно .
если известно .
Здесь:

 – коэффициент утечек гидрожидкости.
– коэффициент утечек гидрожидкости.
Таким образом, имеем:
Механизм запирания литьевой машины предназначен для перемещения литьевой формы, а также для удержания ее в сомкнутом состоянии при впрыске и формовании изделия. Конструктивные параметры и кинетика прессовой части литьевой машины определяются требуемой быстроходностью машины, технологическими параметрами процесса и геометрическими характеристиками изделия. Скорость смыкания-размыкания плит должна быть максимальной, а в конце хода должна снижаться для предотвращения удара полуформ.
На практике разработано и применяется большое число различных механизмов запирания, которые можно разделить на две группы: простые и комбинированные. В простых конструкциях механизмы перемещения плит и запирания формы совмещены, в комбинированных перемещение плиты осуществляется одним механизмом, а другой создает необходимое усилие смыкания формы (запирания).
 По виду привода простые и комбинированные конструкции подразделяются на гидравлические, пневматические, гидромеханические, пневмомеханические и механические. Гидравлические и пневматические конструкции относятся к механизмам силового запирания, в которых усилие запирания является внешним по отношению к самому механизму. Гидромеханические, пневмомеханические и механические устройства являются механизмами кинематического запирания. В механизмах этого типа усилие запирания развивается за счет упругой деформации звеньев, создаваемой приводом. После прекращения действия силы, развиваемой ведущим звеном механизма, необходимое усилие запирания сохраняется в виде внутренней силы, являющейся результатом упругой деформации.
По виду привода простые и комбинированные конструкции подразделяются на гидравлические, пневматические, гидромеханические, пневмомеханические и механические. Гидравлические и пневматические конструкции относятся к механизмам силового запирания, в которых усилие запирания является внешним по отношению к самому механизму. Гидромеханические, пневмомеханические и механические устройства являются механизмами кинематического запирания. В механизмах этого типа усилие запирания развивается за счет упругой деформации звеньев, создаваемой приводом. После прекращения действия силы, развиваемой ведущим звеном механизма, необходимое усилие запирания сохраняется в виде внутренней силы, являющейся результатом упругой деформации.
В современных конструкциях литьевого оборудования прессовые части пневматического, пневмомеханического и механического типов не нашли широкого применения из-за незначительности развиваемых ими усилий запирания. В литьевых машинах с малым объемом впрыска применение механических узлов запирания может быть оправдано ввиду их высокой быстроходности и малой энергоемкости.
Наиболее широкое распространение получили гидравлические и гидромеханические конструкции.
Гидравлические механизмы осуществляют подвод плиты и запирание формы с помощью одного или нескольких гидроцилиндров без введения промежуточных механизмов, что повышает надежность конструкции. Гидравлические механизмы позволяют легко регулировать расстояние между плитами, надежно предохранены от поломок и перегрузок. К недостаткам гидравлических узлов запирания относится их значительная металлоемкость и малая скорость смыкания формы по сравнению с гидромеханическими конструкциями.
Прессовая часть литьевой машины (механизм запирания формы) современной комбинированной гидравлической конструкции представлена на рис. 52. В этом механизме неподвижная плита 12 выполнена заодно с гидроцилиндром 1 и жестко связана колоннами 7 с гайками 9 с другой неподвижной плитой 8. Полый плунжер 2 прикреплен к промежуточной плите 4 защелкой 3.

Рис. 52.
Ускоренное смыкание подвижной плиты 6 с неподвижной плитой 5 осуществляется двумя вспомогательными гидроцилиндрами 11 со штоками 10. При этом происходит вывод вспомогательного плунжера 5 из полости плунжера 2. После этого защелка 3 с помощью гидроцилиндра 13 закрывает промежуток между вспомогательным плунжером 5 и плунжером 2. Усилие запирания (смыкания) формы, создаваемое затем гидроцилиндром 1 при подаче туда жидкости, от плунжера 2 через защелку 3 и вспомогательный плунжер 5 передается подвижной плите 6.

Рис. 53.
Полностью гидравлический механизм смыкания, обеспечивающий большую жесткость, короткое время холостого хода и необходимую плотность смыкания полуформ, представлен на рис. 53.
Рабочая жидкость подается по внутреннему каналу поршня гидроцилиндра 3 ускоренного смыкания. Попадая в поршневую полость этого цилиндра, рабочая жидкость воздействует на донышко гидроцилиндра 3 и перемещает поршень гидроцилиндра запирания 4. При этом в поршневой полости гидроцилиндра 4 создается разряжение, открывается клапан, и рабочая жидкость заполняет поршневую полость гидроцилиндра 4. Подвижная плита 2 с полуформой прижимается к неподвижной полуформе, закрепленной на неподвижной плите 1. Усилие замыкания создается поступлением небольшого количества рабочей жидкости в поршневую полость гидроцилиндра 4 при закрытом клапане. Давление жидкости повышается до необходимого для создания требуемого усилия замыкания полуформ.
Гидравлические механизмы запирания требуют более высоких затрат на системы гидравлического и электрического управления.
 Расчет гидравлического механизма запирания сводится к определению диаметров и хода поршней главного и вспомогательного цилиндров, а также производительности насоса гидропривода.
Расчет гидравлического механизма запирания сводится к определению диаметров и хода поршней главного и вспомогательного цилиндров, а также производительности насоса гидропривода.
Диаметр  поршня главного гидроцилиндра определяется по уравнению
поршня главного гидроцилиндра определяется по уравнению

где  – усилие запирания (смыкания);
– усилие запирания (смыкания);
 – давление жидкости в гидросистеме запирания, выбираемое в пределах от 5 до 20 МПа.
– давление жидкости в гидросистеме запирания, выбираемое в пределах от 5 до 20 МПа.
Производительность  гидронасоса привода механизма смыкания определяется из соотношения
гидронасоса привода механизма смыкания определяется из соотношения

где  – принятая скорость смыкания формы (для ускоренного перемещения
– принятая скорость смыкания формы (для ускоренного перемещения  , для замедленного перемещения
, для замедленного перемещения 
 ).
).
Диаметр плунжера  ускоренного перемещения подвижной плиты определяется из условия обеспечения принятой скорости
ускоренного перемещения подвижной плиты определяется из условия обеспечения принятой скорости  при определенной производительности насоса:
при определенной производительности насоса:

В механизмах запирания гидравлического типа расчету на прочность подлежат гидроцилиндры, колонны и плиты.
В механизмах запирания простой гидромеханической конструкции усилие запирания формы и движение подвижной плите сообщаются от гидроцилиндра через рычажную систему. Гидромеханические конструкции позволяют получить значительные усилия запирания плит при небольших усилиях, развиваемых гидроцилиндром привода. Это дает возможность использовать  в гидросистемах давления, значительно меньшие, чем в гидравлических механизмах запирания.
в гидросистемах давления, значительно меньшие, чем в гидравлических механизмах запирания.
Главными преимуществами гидромеханических устройств являются: небольшие габариты и масса, малая металлоемкость; высокая средняя скорость запирания; безударное запирание ввиду возможности замедления скорости сближения форм перед их смыканием.

Рис. 54.
Кинематические схемы гидромеханических устройств запирания довольно разнообразны. На рис. 54 представлены конструктивная и кинематическая схемы простого шестизвенного гидромеханического механизма с качающимся гидроцилиндром 1, применяемого в литьевых машинах с усилием запирания до 1 МН.
Гидроцилиндр 1 через систему рычагов 3 и шарниров 4 перемещает подвижную плиту 5. Гидроцилиндр 1 шарнирно закреплен на каретке 9, которая вместе с системой рычагов может перемещаться по колоннам 8 при регулировании расстояния между плитами 5 и 7. Неподвижные плиты 2 и 7 жестко связаны колоннами 8. Смыкание полуформ 6 осуществляется при подаче жидкости в штоковую полость гидроцилиндра.
На рис. 55 показана конструкция механизма замыкания с симметричным или сдвоенным коленно-рычажным узлом.
На конце штока 4 гидроцилиндра 5 закреплена поперечина с шарнирно закрепленными на ее концах тягами. В свою очередь, другим концом тяги шарнирно крепятся с рычажной системой 3, которая на шарнирах крепится к плитам 6 и 2. К плите 2 крепится подвижная полуформа, а к плите 1 – неподвижная. При подаче рабочей жидкости в штоковую полость гидроцилиндра 5 шток 4 движется влево, рычажная система 3 складывается, плита 2 с полуформой перемещается влево. Форма раскрывается. Замыкание формы происходит при подаче рабочей жидкости в поршневую полость гидроцилиндра 5.

Рис. 55.
Для коленчато-рычажных механизмов с неподвижным гидроцилиндром смыкания характерна возможность реализации минимального хода раскрытия литьевых форм. Важными показателями для них являются: отношение максимальной скорости размыкания  к максимальной скорости смыкания
к максимальной скорости смыкания  (
( ) и отношение минимального усилия размыкания
) и отношение минимального усилия размыкания  к минимальному усилию смыкания
к минимальному усилию смыкания  (
( ).
).
Отношение скоростей смыкания и размыкания при использовании параллельной рычажной системы по сравнению с применением простого коленчато-рычажного механизма в направлении раскрытия формы является величиной переменной. Оно проходит через максимум и в конце раскрытия формы достигает минимума. Так как изменение отношения усилий размыкания и смыкания носит обратный характер, то к началу процесса смыкания наблюдаются большие ускорения.
Коленчато-рычажные механизмы смыкания потребляют на 15–20% меньше энергии и рабочей жидкости по сравнению с гидравлическими механизмами. Их недостатком является интенсивная изнашиваемость шарнирных соединений и плохая воспроизводимость усилий смыкания. Первый из указанных недостатков может быть частично устранен за счет применения централизованной смазки; для улучшения же воспроизводимости установленных усилий смыкания используют регулирование давления жидкости в гидроцилиндре механизма смыкания.
Усилие запирания в узлах рычажной конструкции зависит от создаваемого усилия на ведущем звене механизма, кинематики механизма, конструкции узла его регулирования.
Рычажные конструкции рассчитывают в положении, когда литьевая форма закрыта. В этом положении колонны и звенья рычагов испытывают деформации: колонны (станина) растягиваются, а рычаги сжимаются.

Рис. 56.
Начальную длину колонн при соприкосновении полуформ можно выразить через размеры механизма (рис. 56):

где  ,
,  ,
,  и
и  – длины первого и второго звеньев рычагов, плиты и формы;
– длины первого и второго звеньев рычагов, плиты и формы;  и
и  – углы между звеньями рычагов и горизонтальной осью в момент соприкосновения половин формы.
– углы между звеньями рычагов и горизонтальной осью в момент соприкосновения половин формы.
Упругое удлинение колонн

здесь  – усилие запирания формы;
– усилие запирания формы;  – модуль упругости материала колонн;
– модуль упругости материала колонн;  – суммарная площадь сечения колонн.
– суммарная площадь сечения колонн.
Упругое сокращение звеньев рычажного механизма

где  ,
,  ,
,  и
и  – модули упругости первого и второго звеньев рычагов, плиты и формы;
– модули упругости первого и второго звеньев рычагов, плиты и формы;  ,
,  , и
, и  – площади сечения первого и второго звеньев рычагов, плиты и формы.
– площади сечения первого и второго звеньев рычагов, плиты и формы.
Уравнение совместных деформаций запишем:

где  – общая длина всех звеньев;
– общая длина всех звеньев;  – деформация звена.
– деформация звена.
После некоторых допущений и преобразований можно получить:

Относительная деформация всего рычажного механизма  повышается с увеличением углов и и соотношения
повышается с увеличением углов и и соотношения  . При определенных размерах звеньев и колонн развиваемое усилие тем больше, чем больше углы и в момент соприкосновения полуформ. Если угол
. При определенных размерах звеньев и колонн развиваемое усилие тем больше, чем больше углы и в момент соприкосновения полуформ. Если угол  (
( – угол, на который рассчитан механизм) то колонны будут деформировать больше и будет развиваться большее усилие запирания (предполагается, что усилие привода ведущего звена достаточно для этого). Если
– угол, на который рассчитан механизм) то колонны будут деформировать больше и будет развиваться большее усилие запирания (предполагается, что усилие привода ведущего звена достаточно для этого). Если  , то усилие запирания будет меньше, чем указано в паспорте машины.
, то усилие запирания будет меньше, чем указано в паспорте машины.
0сновные производители литьевых машин в СНГ – Хмельницкое ПО «Термопластавтомат» и Одесское ПО «Прессмаш». Серии выпускаемых литьевых машин включают 15 типоразмеров машин с усилием запирания 12,5…6000 кН. Это машины типов ДЕ, ДК и ДП. Обозначение модели литьевой машины, например ДЕ 3727, расшифровывают следующим образом: Д — машина для производства изделий из неметаллов; Е — поколение машины; 37 — серия машины, 27 — условное усилие запирания инструмента, соответствующее 500 кН (30; 32; 34 и 38 — условное усилие запирания, соответствующее 1000; 1600; 2500 и 6300 кН).
Управление литьевыми машинами электронное; машины с цикловым программным управлением обозначают буквой Ц, с числовым программным управлением — буквой Ф.
В марках моделей зарубежного производства в числителе указывают усилие запирания, в знаменателе — объем впрыска, приведенный к давлению 1 МПа. Однако, многие фирмы пользуются своим обозначением; например, в обозначении литьевой машины фирмы «Arbung» (Германия) 221-50-250 цифры соответствуют расстоянию между колоннами в свету, приведенному объему отливки и усилию запирания инструмента.
В соответствии с ГОСТ 10767-87 предусмотрены следующие исполнения машин; в зависимости от давления литья и объема впрыска: I — машины общего назначения; II — машины с повышенным давлением литья и уменьшенным объемом впрыска; Ш — машины с пониженным давлением литья и увеличенным объемом впрыска.
Технические характеристики вышеуказанных литьевых машин приведены в следующих таблицах:
Технические характеристики литьевых машин Хмельницкого ПО «Термопластавтомат»
| Параметр
| Значение параметра для модели
| |
| ДЕ 3127.
Ф1
| ДЕ 3127-63Ц1
| ДЕ ЗЗЗ0.
Ф1
| ДЕ ЗЗЗ0-125Ц1
| |
| Узел запирания
| |
| Усилие запирания инструмента, кН
|
|
|
|
| |
| Расстояние между колоннами в свету, мм:
по горизонтали
по вертикали
|
|
|
|
| |
| Размеры крепежных плит, мм (длина × высота)
| 460×390
| 460×390
| 590×510
| 590×510
| |
| Высота инструмента, мм
| 140...250
| 140.250
| 160...320
| 160..320
| |
| Максимальное расстояние между крепежными плитами, мм
|
|
|
|
| |
| Ход подвижной плиты при наибольшей высоте инструмента, мм
|
|
|
|
| |
| Узел пластикации и впрыска
| |
| Диаметр D шнека, мм
|
|
|
|
| |
| Отношение D / L
| 15,1
| 18,5
| 15,7
| 15,7
| |
| Объем впрыска, см3
|
|
|
|
| |
| Объемная скорость впрыска, см3/с
|
|
|
|
| |
| Крутящий момент, Нм
|
|
|
|
| |
| Пластикационная производительность, кг/ч
|
|
|
|
| |
| Мощность привода шнека, кВт
| 13,6
| 13,6
| 17,3
| 17,3
| |
| Мощность электронагревателя, кВт
| 6,2
| 4,5
| 5,5
| 5,4
| |
| Общие данные машины
| |
| Число сухих циклов, мин–1
|
|
|
|
| |
| Суммарная установленная мощность, кВт
| 17,5
| 15,5
| 20,5
| 20,4
| |
| Габаритные размеры, мм:
длина
ширина
высота
|
|
|
|
| |
| Масса, кг
|
|
|
|
| |
Кроме указанных моделей ПО выпускает литьевую машину Д 3136-1000(см. далее).
Примечание. Для приведенных моделей механизм запирания типа 2, давление литья 140 МПа, число зон обогрева узла пластикации и впрыска – 4.
Технические характеристики литьевых машин Хмельницкого ПО «Термопластавтомат»
| Параметр
| Значение параметра для модели
| |
| ДЕ 3132-
250Ц1
| ДЕ 3334.
Ф1
| ДЕ 3121.1
| ДЕ ЗЗЗ2
Ф1
| |
| Узел запирания
| |
| Усилие запирания инструмента, кН
|
|
|
|
| |
| Расстояние между колоннами в свету, мм:
по горизонтали
по вертикали
|
|
|
|
| |
| Размеры крепежных плит, мм (длина × высота)
| 756×656
| 756×656
| 290×250
| 756×656
| |
| Высота инструмента, мм
| 200...400
| 200...400
| 110...160
| 200...400
| |
| Максимальное расстояние между крепежными плитами, мм
|
|
|
|
| |
| Ход подвижной плиты при наибольшей высоте инструмента, мм
|
|
|
|
| |
| Узел пластикации и впрыска
| |
| Диаметр D шнека, мм
|
|
|
|
| |
| Отношение D / L
| 14,6
| 14,6
| 18,5
| 14,6
| |
| Объем впрыска, см3
|
|
|
|
| |
| Давление литья, МПа
|
|
|
|
| |
| Объемная скорость впрыска, см3/с
|
|
|
|
| |
| Крутящий момент, Нм
|
|
| –
|
| |
| Пластикационная производительность, кг/ч
|
|
|
|
| |
| Мощность привода шнека, кВт
|
|
|
|
| |
| Число зон обогрева
|
|
|
|
| |
| Мощность электронагревателя, кВт
| 9,5
| 9,5
| 1,5
| 10,8
| |
| Общие данные машины
| |
| Число сухих циклов, мин–1
|
|
|
|
| |
| Суммарная установленная мощность, кВт
| 31,5
| 31,5
| 7,0
| 32,8
| |
| Габаритные размеры, мм:
длина
ширина
высота
|
|
|
|
| |
| Масса, кг
|
|
|
|
| |
| | | | | | | | |
Примечание. Для приведенных моделей механизм запирания типа 2.
Технические характеристики литьевых машин Одесского ПО «Прессмаш»
| Параметр
| Значение параметра для модели
| |
| Д3334.
Ф1
| Д3136-1000
| ДЗ1З8.2
| ДЕ З140.2
| |
| Узел запирания
| |
| Усилие запирания инструмента, кН
|
|
|
|
| |
| Расстояние между колоннами в свету, мм:
по горизонтали
по вертикали
|
|
|
|
| |
| Размеры крепежной плиты, мм
| –
| –
|
| –
| |
| Высота инструмента, мм
| 250...500
| 320…630
| 400...800
| 500..1000
| |
| Максимальное расстояние между крепежными плитами, мм
|
|
|
|
| |
| Ход подвижной плиты при наибольшей высоте инструмента, мм
|
|
|
|
| |
| Тип механизма запирания
|
|
|
|
| |
| Узел пластикации и впрыска
| |
| Диаметр D шнека, мм
|
|
|
|
| |
| Объем впрыска, см3
|
|
|
|
| |
| Давление лить, МПа
|
|
|
|
| |
| Объемная скорость впрыска, см3/с
|
|
|
|
| |
| Крутящий момент, Нм
| –
| –
|
| –
| |
| Пластикационная производительность, кг/ч
|
|
|
|
| |
| Мощность электронагревателя, кВт
| 14,0
| 12,32
| 27,17
| 36,00
| |
| Общие данные машины
| |
| Число сухих циклов, мин–1
| 29,0
| 14,3
| 12,5
| 7,5
| |
| Суммарная установленная мощность, кВт
| 44,0
| 49,3
|
|
| |
| Габаритные размеры, мм:
длина
ширина
высота
|
|
|
|
| |
| Масса, кг
|
|
|
|
| |
Примечание. Для приведенных моделей число зон обогрева узла пластикации и впрыска – 4.
Кроме вышеуказанного оборудования для переработки термопластов литьем под давлением, ЗАО «Атлант» (г. Минск) выпускаются термопластавтоматы модели БЗСТ, предназначенные для переработки различных термопластичных материалов с температурой пластикации до 350 °С. Оригинальная конструкция сочетает в себе передовые достижения, применяемые при производстве термопластавтоматов. Система управления, гидравлическая система, электронное оборудование, узел инжекции выполнены на уровне передовых европейских компаний. Гидравлическая система основана на регулируемом насосе с электронной системой управления и пропорциональной гидроаппаратурой, что обеспечивает бесступенчатое регулирование скоростей и движений в необходимом диапазоне. Износостойкий узел пластикации позволяет перерабатывать наполненные композиции.
Рассмотрим конструкцию термопластавтоматов серии БЗСТ на примере литьевой машины БЗСТ 125/250. Общий вид термопластавтомата представлен на рис. 57.

Рис. 57
Основание 1 сваренной конструкции со встроенным гидробаком опирается на восемь регулируемых опор, которые дают возможность выставить термопластавтомат в горизонтальной плоскости. На основании 1 устанавливаются основные узлы термопластавтомата: узел замыкания 2 служит для замыкания литьевых форм, и удержания их в процессе литья с заданным усилием. Для крепления литьевых форм на подвижной и неподвижной плитах имеется сетка резьбовых отверстий М16-7Н в соответствии с ГОСТ 10767-87. Бункер 3 предназначен для накопления и подачи материала в пластикационный цилиндр. Загрузка сырья в бункер производится пневмотранспортом, вручную, транспортером. Гидроцилиндр 4 обеспечивает перемещение узла пластикации и впрыска и поджим его к форме. Узел пластикации и впрыска 5 предназначен для набора необходимой дозы пластицируемого материала и впрыска его в литьевую форму. Гидрооборудование 6 предназначено для приведения в движение и управление механизмами запирания литьевой формы, подвода и отвода узла впрыска, управления клапаном сопла, набора дозы, впрыска разогретого термопласта в литьевую форму, выталкивания отливки из формы. Система охлаждения 7 необходима для стабилизации технологического процесса литья деталей. Места подвода, отвода и расположения системы охлаждения показаны на рис. 57. Пульт управления 8 предназначен для задания параметров рабочих режимов, задания и отмены цикла, контроля отработки узлов и механизмов (диагностика, графика), сохранения параметров техпроцессов по деталям в памяти (создания архива). Пульт состоит из двух частей – верхняя панель визуализации состоящая из монитора, нижняя панель управления с клавиатурой.
Узел замыкания (рис. 58) состоит из плиты несущей – неподвижной 1, которая жестко крепиться на основании и является передней крышкой цилиндров запирания. В центре плиты имеется отверстие диаметром 100Н7 для центрирования неподвижной части литьевой формы. В плите имеются каналы для подвода рабочей жидкости в цилиндры замыкания. Плита подвижная 2 перемещается по линейным направляющим качения. В центральной части плиты установлен выталкиватель 6, также имеется отверстие диаметром 100Н7 для базирования литьевой формы. Подвижная плита связана с несущей четырьмя штоками цилиндров замыкания.

Рис. 58
Цилиндр замыкания (рис. 59) служит для запирания литьевой формы с заданным усилием и удержания ее в процессе литья. Цилиндр замыкания имеет шток-поршень 5, который перемещается в гильзе 7, установленной между плитой несущей 8 и опорной 9 и зафиксирован четырьмя шпильками (М24).

Рис. 59.
Цилиндр быстрого подвода форм крепится на плите опорной 9 винтами 15 и служит для быстрого перемещения подвижной плиты при закрытии и раскрытии формы. Для развоздушивания цилиндра при заполнении гидросистемы в передней и задней крышках имеются пробки 4. Плавность трогания в начале хода и торможения в конце хода обеспечивают встроенные втулки торможения 2.
В штоке имеется канал А управления обратным клапаном 6. Канал Б служит для перелива масла из штоковой полости в бесштоковую и обратно при ускоренном перемещении подвижной плиты.
В передней направляющей втулке 10 установлено шевронное уплотнение, которое дает возможность в процессе эксплуатации производить подтяжку уплотнения. Усилие замыкания передается на плиту подвижную через гайки 11.
При быстром подводе подвижной плиты клапан 6 отведен пружиной и обе полости цилиндра соединены каналом Б, по которому рабочая жидкость перетекает из поршневой полости в штоковую, избыток- по каналу В в бак 12.
При запирании подается давление по каналу А – клапан 6 закрывается, давление подается по каналу Г и создается давление запирания. Перед раскрытием формы происходит сброс давления в каналах А и Г, пружиной открывается клапан 6 и масло перетекает в поршневую полость цилиндра по каналу Б, а недостающий объем засасывается из бачка 12 в верхние цилиндры замыкания и из бака гидростанции через клапана 8 в нижние цилиндры.
Выталкиватель (рис. 58, поз. 6) устанавливается на подвижной плите и служит для удаления готовых деталей из литьевой формы. Выталкиватель (рис. 60) состоит из цилиндра 1, который установлен на четырех стержнях 2 на обратной стороне подвижной плиты. Шток соединен с плитой 3, на которой установлены четыре боковых толкателя 4 и центральный 5. При сборке торцы толкателей выставляются в одну плоскость подгонкой компенсаторов 6, поэтому при демонтаже необходимо толкатель и компенсатор маркировать и использовать совместно. Центральный толкатель 5 состоит из двух частей А и Б. Часть Б заказчик может изготовить по своим размера








