

Историки об Елизавете Петровне: Елизавета попала между двумя встречными культурными течениями, воспитывалась среди новых европейских веяний и преданий...

Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
Историки об Елизавете Петровне: Елизавета попала между двумя встречными культурными течениями, воспитывалась среди новых европейских веяний и преданий...
Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
Топ:
Генеалогическое древо Султанов Османской империи: Османские правители, вначале, будучи еще бейлербеями Анатолии, женились на дочерях византийских императоров...
Особенности труда и отдыха в условиях низких температур: К работам при низких температурах на открытом воздухе и в не отапливаемых помещениях допускаются лица не моложе 18 лет, прошедшие...
Интересное:
Аура как энергетическое поле: многослойную ауру человека можно представить себе подобным...
Берегоукрепление оползневых склонов: На прибрежных склонах основной причиной развития оползневых процессов является подмыв водами рек естественных склонов...
Что нужно делать при лейкемии: Прежде всего, необходимо выяснить, не страдаете ли вы каким-либо душевным недугом...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
Качественные показатели могут быть определены из переходного процесса. Для этого используют формулу, описывающую дискретное изображение переходного процесса:

Для построения переходного процесса функцию H (z) раскладывают в ряд Лорана:
H (z) = h 0 z 0 + h 1 z –1 + h 1 z –1 + …
Коэффициенты ряда представляют собой значения переходного процесса в моменты времени 0, Т, 2 Т, 3 Т … (рис. 7.5).

Рис. 7.5. Переходный процесс
Такой переходный процесс является приближенным, так как не дает информации о значениях выходной величины между рассматриваемыми дискретными моментами времени. Возможны, например, колебания, которые в этом случае называют «скрытыми».
Для оценки устойчивости правило Ляпунова формулируется следующим образом: система устойчива, если корни характеристического уравнения ограничены по модулю значением 1:  (вспомните, как правило Ляпунова формулируется для непрерывных систем).
(вспомните, как правило Ляпунова формулируется для непрерывных систем).
При использовании критерия устойчивости Гурвица выполняют замену переменной в характеристическом уравнении:  .
.
Далее записывают уравнение от параметра s и строят определитель так же, как и для непрерывной системы.
При использовании частотных критериев устойчивости (Найквиста и Михайлова) выполняют еще одну замену переменной  и записывают передаточную функцию W (jv), где v – псевдочастота
и записывают передаточную функцию W (jv), где v – псевдочастота  .
.
Частотные характеристики или кривую Михайлова строят как функции псевдочастоты.
Литература: [1, c. 289 – 290], [2, c. 245 – 250], [3. с.571 – 598]
АДАПТИВНЫЕ САР
Адаптивными называют такие системы управления, которые в процессе эксплуатации при изменении параметров объектов или характеристик внешних воздействий самостоятельно без участия человека изменяют параметры регулятора, его структуру, настройку или регулирующие воздействия для поддержания оптимального режима работы объекта.
|
|
В структурном отношении их специфика заключается в наличии дополнительного контура – контура самонастройки (КСН), назначение которого состоит в логической переработке информации об изменяющихся условиях работы и последующем воздействии на основной контур управления.
В зависимости от целей адаптации различают:
– системы автоматической оптимизации, которые настраиваются на экстремум определенной целевой функции (экстремальные);
– системы, настраивающиеся на заданные свойства, определяемые областью допустимых значений варьируемых параметров;
– системы, настраивающиеся на решение логических задач.
Экстремальные системы наиболее распространены и делятся на поисковые и беспоисковые. В поисковых для выделения экстремума используются методы детерминированного или случайного поиска, в беспоисковых адаптация осуществляется с помощью идентификации параметров управляемого объекта.
Поисковые системы делятся на системы слепого поиска, системы детерминированного поиска и системы случайного поиска.
Беспоисковые системы делятся на системы, настраивающиеся по характеристикам внешних воздействий; системы, настраивающиеся по характеристикам основного контура; системы, настраивающиеся по ошибке сравнения реакций системы и модели на пробные и рабочие сигналы. Первые служат для поддержания оптимального режима при изменении характеристик внешних воздействий. Контур самонастройки в них содержит датчик характеристик внешних воздействий (Д), преобразователь изменения варьируемых параметров (П) и исполнительный элемент (ИЭ) для воздействия на варьируемые параметры (рис. 8.1).

Рис. 8.1. Беспоисковая САР
Системы, настраивающиеся по характеристикам основного контура, имеют аналогичный КСН, с помощью которого осуществляется контроль над изменением характеристик основного контура.
|
|

Рис. 8.2. Беспоисковая САР
Системы, настраивающиеся по ошибке сравнения реакций системы и модели на пробные и рабочие сигналы, содержат модель замкнутой системы, которая служит для определения характеристик основного контура (рис. 8.3).

Рис. 8.3. Беспоисковая САР
В процессе работы система может подключать к входу генератор тестовых сигналов (ГТС) и сравнивать реакцию на них системы и модели М. Если имеются различия в реакции, ИЭ воздействует на регулятор для подстройки параметров.
Поисковые системы делятся на системы слепого поиска, системы детерминированного поиска и системы случайного поиска. В системе выделяют объект оптимизации (регулятор или его часть) и выбирают целевую функцию – легко контролируемый параметр, характеризующий качество работы системы. В состав объекта оптимизации вводят датчик целевой функции. Также назначают параметр настройки, от которого зависит целевая функция (варьируемый параметр), т. е. j = f (m).
Система слепого поиска (рис. 8.4) работает методом сканирования в два цикла. Во время первого цикла варьируемый параметр исполнительный элемент ИЭ пошагово изменяет в диапазоне от m min до m max. При этом блок запоминания БЗ фиксирует максимальное значение целевой функции j max. Во время второго цикла m изменяют в обратном направлении, пока блок сравнения БС не зафиксирует достижение j max.
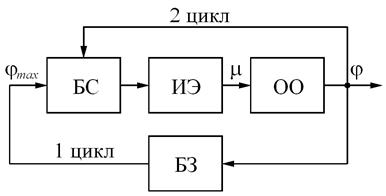
Рис. 8.4. Система слепого поиска
Системы детерминированного поиска обычно производят поиск экстремума с помощью определения производной целевой функции (рис. 8.5). При изменении варьируемого параметра m дифференцирующие устройства Д1 и Д2 определяют производные по времени d j/ dt и d m/ dt. Затем логическое устройство ЛУ на их основе вычисляет производную d j/ d m. Экстремум фиксируется, когда производная меняет знак.

Рис. 8.5. Система детерминированного поиска
Системы случайного поиска по структуре подобны системам слепого поиска, но вместо сканирования задаются случайно выбранные значения m. Сравнивая полученные значения целевой функции постепенно сужают разброс варьируемых параметров и приближаются к экстремуму.
Литература: [5, c. 329 – 340]
СИСТЕМЫ С НЕЧЕТКОЙ ЛОГИКОЙ (FUZZY LOGIC)
Системы с нечеткой логикой относятся к числу систем с искусственным интеллектом и предназначены для управления объектами, информация о которых ограничена или их свойства изменяются в широких пределах. Для таких объектов алгоритм управления практически невозможно формализовать, поэтому используют нечеткую логику (fuzzy logic), разработанную американским ученым Lutfi A. Zadeh (Лютфи Заде). Она оперирует нечеткими множествами (fuzzy sets), для которых невозможно установить четкие границы. Для элементов x нечеткого множества A вводится понятие функции принадлежности  , которая по сути дела является степенью уверенности в том, что рассматриваемый элемент является членом множества. Если применить функцию принадлежности к обычным множествам, то она будет принимать всего два значения: m A (x) = 0, если x Ï A или m A (x) = 1, если x Î A.
, которая по сути дела является степенью уверенности в том, что рассматриваемый элемент является членом множества. Если применить функцию принадлежности к обычным множествам, то она будет принимать всего два значения: m A (x) = 0, если x Ï A или m A (x) = 1, если x Î A.
|
|
К нечетким множествам относится, например, множество значений величины x, если для нее заданы предельные отклонения ±D x. Диапазон [ x – D x, x + D x ] называется нечетким числом. Если два нечетких числа A и B определены на совпадающих интервалах, то справедливо нечеткое равенство A» B. Для нечетких чисел также используют понятия ограниченной суммы и ограниченной разности:
 ,
,
 .
.
Графически это показано на рис. 9.1.

Рис. 9.1. Сложение и вычитание нечетких чисел
В случае применения операций с нечеткими числами для целей автоматического управления вместо численных значений величин используют так называемые лингвистические переменные, которые являются приблизительной вербальной оценкой величины. Например, в случае регулирования температуры интервал ее изменения разбивается на меньшие интервалы с определенными функциями принадлежности (рис. 9.2). Каждому интервалу присваивается лингвистическое значение: Н – нормально, П – прохладно, Х – холодно, Т – тепло, Ж – жарко (интервалов может быть и больше).

Рис. 9.2. Лингвистические оценки температуры
Структура системы регулирования с нечеткой логикой показана на рисунке 9.3.

Рис. 9.3. Система с нечеткой логикой
Регулирующая часть системы выполняется на основе цифровых вычислительных устройств (например, DSP – Digital signal processor, микроконтроллер для выполнения с высокой производительностью однотипных повторяющихся операций) включает три основных блока:
|
|
F – фаззификатор, формирующий лингвистическую переменную  , соответствующую ошибке рассогласования x;
, соответствующую ошибке рассогласования x;
А – блок реализации алгоритма управления (инференц-блок), выполняющий операции с нечеткими числами (лингвистическими переменными) и формирующий лингвистическую переменную  , соответствующую управляющему воздействию;
, соответствующую управляющему воздействию;
DF – дефаззификатор, преобразующий лингвистическую переменную в управляющее воздействие u.
Система формирует выходную величину методом последовательных приближений к номиналу. Лингвистическая переменная при этом выбирается в соответствии с лингвистической переменной . Например, при регулировании температуры в системе с электронагревательным элементом:
|
|
|
| жарко | сильно уменьшить ток |
| тепло | уменьшить ток |
| нормально | оставить без изменения |
| прохладно | увеличить ток |
| холодно | сильно увеличить ток |
В итоге система работает более медленно и менее точно по сравнению с обычной САР, однако позволяет работать с объектами, динамические свойства которых плохо определены.
В настоящее время системы с нечеткой логикой используются в кондиционерах, стиральных машинах (управление режимами привода при различной загрузке барабана) и т. д.
Литература: [7, с. 265 – 270]
ЛИТЕРАТУРА
1. Солодовников, В.В., Плотников, В.Н., Яковлев, А.В. Основы теории и элементы систем автоматического регулирования. – М.: Машиностроение, 1985.
2. Теория автоматического управления/ Под ред. Воронова А.А. – М.: Высшая школа, ч. 1, 2. – 1986.
3. Бесекерский, В.А., Попов, Е.П. Теория систем автоматического регулирования. – М.: Наука, 1975. – 768 с.
4. Топчеев, Ю.И. Атлас для проектирования систем автоматического регулирования: Учеб. пособие для втузов. – М.: Машиностроение, 1978.
5. Суевалов, Л.Ф. Справочник по расчетам судовых автоматических систем. – Л.: Судостроение, 1989. – 408 с.
6. Элементы автоматики: Учеб.-метод. пособие/ М.Г. Киселев [и др.] – Минск: БНТУ, 2010. – 113 с.
7. Опейко, О.Ф., Петренко, Ю.Н. Микропроцессорные средства в автоматизированном электроприводе: учеб. пособие. – Минск: Амалфея, 2008. – 340 с.
|
|
|

Типы сооружений для обработки осадков: Септиками называются сооружения, в которых одновременно происходят осветление сточной жидкости...

Биохимия спиртового брожения: Основу технологии получения пива составляет спиртовое брожение, - при котором сахар превращается...

Адаптации растений и животных к жизни в горах: Большое значение для жизни организмов в горах имеют степень расчленения, крутизна и экспозиционные различия склонов...

История создания датчика движения: Первый прибор для обнаружения движения был изобретен немецким физиком Генрихом Герцем...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!