Для оценки точности используют величину ошибки регулирования в типовых режимах работы.
1. Установившийся режим
При постоянных значениях задающего и возмущающего воздействий оценивают статическую ошибку регулирования.
Для определения величины статической ошибки используем структурную схему САР, приведенную к виду с единичной обратной связью (рис. 4.18).

Рис. 4.18
Если условно разорвать цепь обратной связи, получаем так называемую разомкнутую систему с передаточной функцией W (p), входной величиной для которой является ошибка рассогласования x (t), выходной – регулируемая величина y (t). Передаточная функция замкнутой системы, для которой входной величиной является задающее воздействие g (t),
 .
.
Ошибка регулирования
 .
.
В статическом режиме  , где g 0 – установившееся значение задающего воздействия.
, где g 0 – установившееся значение задающего воздействия.
При постоянном задающем воздействии и наличии внешнего возмущения f (t):
 ,
,
где Wf (0) – передаточная функция разомкнутой системы по возмущению; f 0 – установившееся значение возмущающего воздействия.
В зависимости от наличия статической ошибки различают статические и астатические САР.
САР называют статической по входному (или возмущающему) воздействию, если при стремлении воздействия к постоянной величине статическая ошибка регулирования также стремится к постоянной величине и зависит от величины воздействия.
САР называют астатической по входному (или возмущающему) воздействию, если при стремлении воздействия к постоянной величине статическая ошибка регулирования стремится к нулю и не зависит от величины воздействия.
Рассмотрим, при каких условиях система будет являться астатической. Видно, что астатизм системы, то есть равенство нулю ошибки в статическом режиме, возможен только при (1 + W (0)) ® ¥ или W (0) ® ¥. Для соблюдения этого условия в знаменателе передаточной функции разомкнутой системы должен присутствовать множитель p, то есть в составе системы должны быть интегрирующие звенья. Количество интегрирующих звеньев или степень p в передаточной функции разомкнутого контура САР называют порядком астатизма системы r:
Для астатической системы с любым порядком астатизма при ступенчатом входном воздействии установившаяся ошибка x ст = 0. При этом система может являться статической по возмущающему воздействию, если Wf (0) ® ¥ и W (0) ® ¥.
Для статической системы передаточную функцию разомкнутой системы можно представить в виде:
 .
.
Видно, что в статическом режиме W (0) ® K, то есть
 .
.
По возмущающему воздействию
 .
.
где  – коэффициент статизма.
– коэффициент статизма.
Примером статической системы может служить САР частоты вращения ротора электродвигателя, показанная на рис. 4.19.
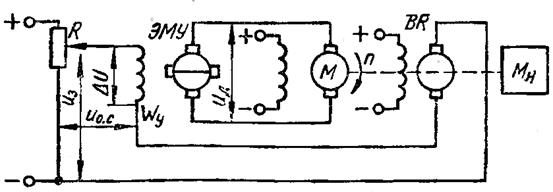
Рис. 4.19
Задачей системы является поддержание скорости вращения n двигателя M на заданном уровне. При увеличении момента нагрузки M н на валу двигателя скорость вращения падает. При этом уменьшается выходной сигнал тахогенератора BR, то есть напряжение обратной связи U ос. Это напряжение вычитается из задающего напряжения U з, снимаемого с делителя на потенциометре R. Разность напряжений  (напряжение рассогласования) усиливается электромашинным усилителем ЭМУ до величины U д и поступает на двигатель. Следовательно, при увеличении момента нагрузки напряжение на двигателе увеличится, заставляя его увеличить скорость. Таким образом, отклонение скорости вращения от номинала снова уменьшится.
(напряжение рассогласования) усиливается электромашинным усилителем ЭМУ до величины U д и поступает на двигатель. Следовательно, при увеличении момента нагрузки напряжение на двигателе увеличится, заставляя его увеличить скорость. Таким образом, отклонение скорости вращения от номинала снова уменьшится.
В описанной системе скорость вращения вала  , где ku – коэффициент передачи двигателя по напряжению; kM – коэффициент передачи двигателя по моменту;
, где ku – коэффициент передачи двигателя по напряжению; kM – коэффициент передачи двигателя по моменту;  ; ;
; ;  .
.
С учетом этих соотношений
 ,
,
где n 0 – скорость вращения без нагрузки (в режиме холостого хода); γ – коэффициент, учитывающий действие нагрузки (коэффициент статизма), который равен тангенсу угла наклона статической характеристики системы (рис. 4.20).

Рис. 4.20
Описанная система является статической по возмущающему воздействию M н. При настройке системы выбирают такое значение задающего воздействия, чтобы скорость вращения равнялась номинальной n н при номинальном моменте нагрузки M н.н.
Чтобы повысить точность описанной выше САР скорости вращения двигателя, в нее можно добавить регулятор напряжения с интегрирующим приводом, состоящем из усилителя У и двигателя M 2, который перемещает подвижный контакт реостата R2 для формирования входного напряжения ЭМУ (рис. 4.21). Задающее напряжение выбирается таким, чтобы при номинальной скорости вращения оно равнялось напряжению обратной связи, то есть напряжение рассогласования в статическом режиме было равно нулю.
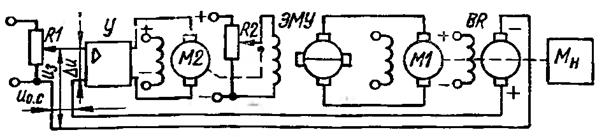
Рис. 4.21
Так как электродвигатель M 2 в режиме отработки угла поворота является интегрирующим звеном, САР будет астатической по возмущающему воздействию, хотя и при более медленной работе. Ее нагрузочная характеристика будет горизонтальна (рис. 4.22).

Рис. 4.22
2. Движение с постоянной скоростью
Режим используется для оценки точности систем с астатизмом 1-го порядка, для которых x ст = 0. На входе системы действует линейно изменяющийся сигнал  . Изображение входного сигнала
. Изображение входного сигнала  , тогда изображение установившейся ошибки
, тогда изображение установившейся ошибки
 .
.
Переходя от изображения к оригиналу, получим
 .
.
Эта ошибка называется скоростной (x ск) и обратно пропорциональна коэффициенту передачи разомкнутой системы, который при астатизме 1-го порядка называется добротностью по скорости.
3. Движение с постоянным ускорением
Режим используется для оценки точности систем с астатизмом 2-го порядка, для которых x ст = 0 и x ск = 0. На входе системы действует линейно изменяющийся сигнал  . Изображение входного сигнала
. Изображение входного сигнала  , тогда изображение установившейся ошибки
, тогда изображение установившейся ошибки
 .
.
Переходя от изображения к оригиналу, получим
 .
.
Эта ошибка называется ошибкой по ускорению и обратно пропорциональна коэффициенту передачи разомкнутой системы, который при астатизме 2-го порядка называется добротностью по ускорению.
Таким образом, астатические САР имеют более высокую точность в установившемся режиме.
На рис. 4.23 показаны реакции систем с различным порядком астатизма ν на типовые виды воздействий.
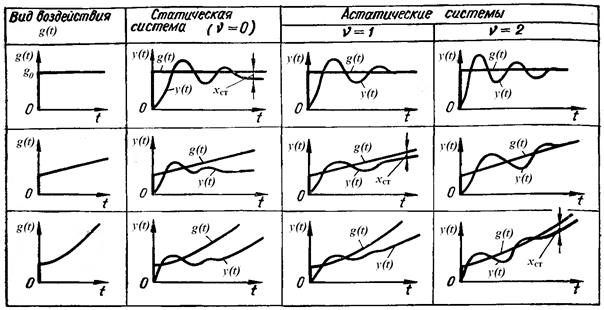
Рис. 4.23
4. Движение в режиме вынужденных колебаний
Такой режим подразумевает действие на входе системы гармонического сигнала вида  . Ошибка регулирования
. Ошибка регулирования
 ,
,  .
.
Так как амплитуда ошибки должна быть значительно меньше амплитуды входного сигнала, т. е.  , модуль знаменателя выражения для ошибки
, модуль знаменателя выражения для ошибки  . В этом случае
. В этом случае
 ,
,
где  – модуль частотной передаточной функции (значение АЧХ) разомкнутой системы при w = w k. Эта формула позволяет оценить точность по ЛАЧХ разомкнутой системы с помощью контрольной точки Ak (рис. 4.24). Точность обеспечивается, если ЛАЧХ проходит над контрольной точкой.
– модуль частотной передаточной функции (значение АЧХ) разомкнутой системы при w = w k. Эта формула позволяет оценить точность по ЛАЧХ разомкнутой системы с помощью контрольной точки Ak (рис. 4.24). Точность обеспечивается, если ЛАЧХ проходит над контрольной точкой.
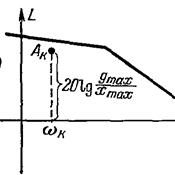
Рис. 4.24 – Оценка точности по ЛАЧХ
В общем случае при произвольном входном сигнале изображение ошибки
 ,
,
где  – передаточная функция по ошибке.
– передаточная функция по ошибке.
Разложим передаточную функцию по ошибке в ряд Маклорена:
 ,
,
где cm – коэффициенты ошибок. Они определяются по правилам разложения в ряд Маклорена:
 .
.
Переходя от изображения к оригиналу:

В статической системе  , в системе с астатизмом 1-го порядка с 0 = 0, с 1 = 1/ K; при астатизме 2-го порядка c 0 = c 1 = 0, c 2 = 2/ K и т. д.
, в системе с астатизмом 1-го порядка с 0 = 0, с 1 = 1/ K; при астатизме 2-го порядка c 0 = c 1 = 0, c 2 = 2/ K и т. д.
Пример. Передаточная функция разомкнутой системы:

 .
.
Задающее воздействие изменяется по закону 
Передаточная функция по ошибке
 .
.
Коэффициенты ошибки:



Производные задающего воздействия:


Установившаяся ошибка

При 
Графики воздействия, ошибки и линия установившегося значения выходной величины показаны на рисунке 4.25.

Рис. 4.25
Повышение точности САР
Используют следующие способы повышения точности системы:
1. Повышение коэффициента передачи системы. Такой способ позволит уменьшить все коэффициенты ошибки, однако приводит к уменьшению запасов устойчивости. Поэтому такой способ применяют одновременно с мерами по повышению устойчивости.
2. Повышение порядка астатизма. Это позволяет свести к нулю коэффициенты ошибки с 0 при увеличении порядка с нулевого до 1-го, с 1 при увеличении порядка с 1-го до 2-го и т.д. При переходе от 1-го порядка астатизма ко 2-му система приобретает структурную неустойчивость, то есть будет неустойчивой при любых значениях параметров. Например, если передаточная функция разомкнутой системы
 ,
,
то при повышении порядка астатизма
Характеристическое уравнение замкнутой системы:
p 2(Tp + 1) + K = 0; Tp 2 + p 2 + K = 0;
а 0 = Т; а 1 = 1; а 2 = 0; а 3 = K.
Так как а 2 = 0 система труктурно неустойчива.
Чтобы избежать такого явления, для повышения порядка астатизма вместо интегрирующих звеньев используют изодромные.
3. Регулирование по производной от ошибки.
В этом случае система реагирует не только на ошибку рассогласования, но и на тенденцию к ее изменению. В итоге система быстрее реагирует на рост ошибки, и точность повышается. Дифференцирующие звенья включаются по схеме форсирующих.
Практическое задание
Описание моделей
В практическом задании исследуются модели САР скорости вращения электродвигателя, показанных на рис. 4.19 и 4.21.
Функциональные схемы САР показаны на рис. 4.26, структурные на рис. 4.27.

а)

б)
Рис. 4.26. Функциональные схемы статической (а) и астатической (б) САР скорости вращения вала электродвигателя

а)

б)
Рис. 4.27. Структурные схемы статической (а) и астатической (б) САР скорости вращения вала электродвигателя
Для исследования САР с различным порядком астатизма используются модели следящих САР угла поворота на сельсинах (рис. 4.28). Астатизм второго порядка обеспечивается добавлением в систему изодромного звена с передаточной функцией  .
.

а)

б)
Рис. 4.28. Функциональная (а) и структурная (б) схемы САР угла поворота
Часть 1. Исследование статической САР.
1. Запустить на выполнение файл «Статические и астатические САР.vsm».
2. Для звеньев статической системы задать значения постоянных времени и коэффициентов передачи. Задать три значения возмущающего воздействия. Запустить процесс моделирования и сравнить переходные процессы в системе при отсутствии и различных значениях возмущающего воздействия.
3. Измерить статическую ошибку в единицах выходной величины и построить зависимость статической ошибки от величины возмущающего воздействия. Рассчитать коэффициент статизма.
4. Для одного из вариантов системы задать величину возмущающего воздействия с помощью генератора ступенчатого сигнала с задержкой по времени. Проанализировать, как ведет себя статическая система при резком изменении возмущающего воздействия.
Часть 2. Исследование астатической САР.
1. Запустить на выполнение файл «Статические и астатические САР.vsm».
2. Для звеньев астатической системы задать значения постоянных времени и коэффициентов передачи. Задать три значения возмущающего воздействия. Запустить процесс моделирования и сравнить переходные процессы в системе при отсутствии и различных значениях возмущающего воздействия. При необходимости увеличить время моделирования.
3. Для одного из вариантов системы задать величину возмущающего воздействия с помощью генератора ступенчатого сигнала с задержкой по времени. Проанализировать, как ведет себя астатическая система при резком изменении возмущающего воздействия.
4. Сравнить характеристики статической и астатической систем.
Часть 3. Исследование САР при повышении порядка астатизма.
1. Запустить на выполнение файл «Статические и астатические САР.vsm».
2. Для звеньев системы задать значения постоянных времени и коэффициентов передачи. Запустить процесс моделирования и проанализировать работу систем с астатизмом 1-го и 2-го порядков при подаче на вход ступенчатого, линейно изменяющегося и квадратично изменяющегося сигналов.
3. Сравнить характеристики систем.






