В технике широко применяют САУ, использующие одновременно принципы управления по отклонению и по возмущению, так называемые системы с комбинированным управления.
В комбинированных системах принцип управления по отклонению реализуется с помощью главной обратной связи, а принцип управления по возмущению с помощью компенсационных связей. Если наиболее существенная ошибка вызывается возмущением f (t), то вводится связь по возмущению, а если такая ошибка получается из-за изменения задающего воздействия, то вводится связь по задающему воздействию.
В комбинированных системах компенсционная связь по основному возмущению (задающему воздействию) устраняет составляющую ошибки, вызываемую этим возмущением (изменением задающего воздействия), а в результате действия обратной связи уменьшаются ошибки. Если с помощью компенсационных связей не полностью устраняются ошибки, вызываемые основными возмущающими воздействиями, то остаточные ошибки также уменьшаются с помощью обратных связей. Основы теории и методы построения комбинированных систем автоматического управления разработаны советскими учеными В.С. Кулебякиным, А.Г. Ивахненко, Б.Н. Петровым, А.И. Кухтенко и др.
Типовая функциональная схема комбинированного управления представлена на рисунке 2.13.

Рис. 2.13. Схема комбинированного управления
Классификация систем автоматического регулирования
Системы стабилизации
Система стабилизации – система, алгоритм функционирования которой содержит предписание поддерживать значение регулируемой величины постоянным. В этих случаях задающее воздействие g (t) = const, то есть g (t) = g °.
Уравнение стабилизирующей САР y (t) = c + k D x, где D x – отклонение управляемой величины от заданной; k – коэффициент передачи системы.
Покажем на примере САР частоты вращения ДПТ (рис. 2.14).

Рис. 2.14. Стабилизирующая САР
ω – частота вращения вала двигателя – регулируемая величина; Мс – момент нагрузки – возмущающее воздействие. Требуемый закон изменения регулируемой величины зависит от особенности ЭД. В данном случае требуется, чтобы ω = const = ω°. Основной причиной отклонения ω является изменение момента нагрузки на валу двигателя и Uп. Для изменения фактической ω используют ЧЭ – тахогенератор ТГ. U тг = k тгω.
R – потенциометр, выполняет функцию ЗУ.
D U = U з– U тг = U з – k тгω.
В правильно спроектированной САУ напряжение на входном усилителе при частоте ω = ω° Δ U ≈ 0.
Из уравнения U з – k тгω ≈ 0; ω = U з/ k тг.
Скорость вращения ω пропорциональна U з следовательно, если U з = const, то и ω = const если k тг = const.
Программные системы
Это системы регулирования, алгоритм которых содержит предписание изменять регулируемую величину в соответствии с заранее заданным законом. В данных системах g(t) = g°(t) – заранее известная функция времени или иногда некоторой другой величины.
Уравнение системы y = F (t), где F (t) – заданная функция времени. Чтобы получить программную систему, необходимо в стабилизирующей системе непрерывно изменять задающее воздействие так, чтобы в каждый момент времени регулируемая величина соответствовала заданному значению.
Чтобы изменять ЗВ необходимо перед ЗУ поставить программный элемент, схема которого показана ниже.

Рис. 2.15 – Общая схема устройства выработки программы управления
ДНП – датчик независимой переменной; ФП – функциональный преобразователь; ПЭ – промежуточный элемент (усиление, преобразование); ИЭ – исполнительный элемент, непосредственно воздействующий на объект назначения (задающее устройство САР).
Пример. Программная система регулирования температуры в камере.
Задающим устройством является потенциометр П, подвижный контакт которого перемещается кулачковым КМ. Потенциометр и чувствительный элемент (терморезистор ТР) включены в мост, напряжение с выхода которого усиливается усилителем У и питает нагревательный элемент НЭ. В роли ДНП выступает форма рабочей поверхности кулачка, а сам КМ с электродвигателем ЭД объединяют функции ФП и ИЭ.


Рис. 2.16. Программная САР температуры
Точность задания программы с помощью кулачков соответствует 0,1…0,5 % (относительная погрешность). При более высоких требованиях используют электрические функциональные преобразователи; наибольшая точность достигается при использовании функциональных преобразователей дискретного типа.
Следящие системы
Это система, алгоритм которой содержит предписание изменять регулируемую величину по неизвестному заранее закону.
В зависимости от физической природы различают:
– системы воспроизводства угла;
– частоты вращения;
– момента;
– электрических величин;
Во всех перечисленных случаях входная величина может быть различной. Чаще всего используют воздействие g (t) в виде напряжения или угла поворота.
Следящие системы воспроизведения угла предназначены для поворота некоторой оси (исполнительной) по закону, определяемой другой командной осью.
Такая ситуация используется при дистанционном измерении различных величин, в автоматических потенциометрах, самопишущих приборах. По принципу действия системы практически не отличаются от стабилизирующих и программных и представляют собой замкнутые САР. В следящих системах роль задающего устройства выполняет либо человек-оператор, либо отдельные устройства.
Регулируемый объект в явном виде отсутствует. В следящих системах воспроизведения угла поворота угол поворота исполнительной оси часто отдельно не измеряется, а используются так называемые датчики рассогласования. Эти датчики вырабатывают электрический сигнал, пропорциональный углу рассогласования системы (рис. 2.17).

Рис. 2.17. Следящая САР угла поворота
В качестве датчиков рассогласования используют: механический дифференциал, потенциометрические датчики, вращающиеся трансформаторы, сельсинные пары.
Рассмотрим систему на потенциометрических датчиках (рис. 2.18).
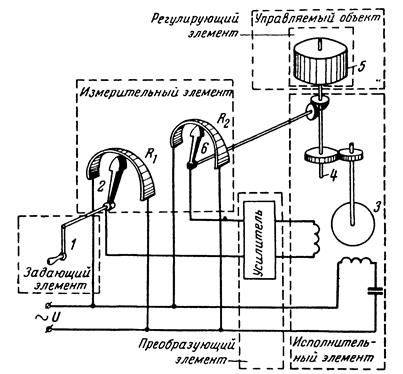
Рис. 2.18. Следящая САР на потенциометрах
Если движок R1 повернуть на α1 ¹ α2, то на входе усилителя появится сигнал рассогласования, который усиливается, и двигатель через редуктор компенсирует это рассогласование, перемещая движок потенциометра R2 на такой же угол.
Такая же система применяется в автоматических потенциометрах для измерения ЭДС (рис. 2.19).
Рис. 2.19. Автоматический потенциометр
ТП – термопара; УПТ – усилительно-преобразующий элемент.
Для контура с напряжениями U к, Ех и U вх: U вх = Ех – U к
Система должна отслеживать изменения Ех с термопары. Если Ех ¹ U к, то имеем напряжение на двигателе, и вал двигателя перемещает движок потенциометра в сторону возникшего рассогласования, а так как с движком потенциометра связано и перо, то на бумаге получим отметку величины рассогласования системы.
Такая же система применяется в автоматических потенциометрах для измерения сопротивления. В этом случае вместо термопары устанавливается терморезистор, а в качестве сравнивающего устройства используется мостовая схема (рис. 2.20).

Рис. 2.20. Автомаитческий потенциометр
Следящие системы с механическим дифференциалом
Здесь в качестве датчика угла рассогласования используется механический дифференциал (рис. 2.21).
Рис. 2.21.САР угла поворота с механическим дифференциалом
Следящие системы на сельсинах и вращающихся трансформаторах (синхронные передачи)
В дистанционных САУ для передачи данных об углах поворота вала используются сельсины.
Сельсин (англ. selsуп = sеlf + sупсhгоnizing – самосинхронизирующийся) – электрическая машина, имеющая на статоре (роторе) смещенные в пространстве на 120° и соединенные звездой три обмотки, называемые обмоткой синхронизации, или трехфазной обмоткой, а на роторе (статоре) – однофазную обмотку. Сельсины предназначены:
2 для осуществления поворотов или синхронного вращения малонагруженного исполнительного вала от механически не связанного с ним командного вала, т. е. в дистанционных системах управления, для передачи на расстояние угловых перемещений или синхронного вращения;
2 для использования в качестве датчиков угла поворота в системах автоматики, для преобразования угла рассогласования двух механически не связанных валов в электрическую величину.
Простота устройства, однотипность датчика и приемника, способность к самосинхронизации, малая погрешность, устойчивость работы при колебаниях напряжения в сети питания относятся к основным преимуществам систем синхронной связи на сельсинах.
По конструктивному исполнению сельсины подразделяются на контактные и бесконтактные.
Основным в конструкции любого сельсина является равномерное распределение трех обмоток синхронизации по окружности статора или ротора и смещение их осей относительно друг друга на 120°. Это необходимо для того, чтобы результирующий магнитный поток обмотки синхронизация, равный геометрической сумме потоков трех обмоток, мог поворачиваться относительно статора (ротора) при перераспределении токов между тремя обмотками.
Большой недостаток контактных сельсинов – наличие контактных колец и щеток, которые увеличивают момент трения, уменьшают точность работы и ухудшают надежность. Указанные недостатки устранены в бесконтактных сельсинах.
В системах автоматики используются две принципиально отличающиеся системы синхронной передачи угла: индикаторная и трансформаторная.
Индикаторная система синхронной связи применяется там, где момент сопротивления на ведомой оси отсутствует или ось нагружена шкалой или стрелкой. Здесь сельсин-приемник самостоятельно отрабатывает угол, задаваемый сельсином-датчиком.
Трансформаторная система синхронной связи применяется там, где на ведомой оси имеется значительный момент сопротивления. Сельсин-приемник отрабатывает угол с помощью механически связанного с ним двигателя.
Простейшая индикаторная система синхронной связи для дистанционной "передачи угла" состоит как минимум из двух сельсинов. Сельсины соединяются по схеме приведенной на рис. 2.22. В индикаторном режиме однофазные обмотки обоих сельсинов являются первичными или обмотками возбуждения. Сельсин, вал ротора которого является командным, называется сельсин-датчик (СД). Сельсин, вал которого является исполнительными называется сельсин-приемник (СП). Углы a1, a2 есть отклонения осей обмоток ротора СД и СП от вертикали или от оси обмоток Е д1 и Е п1 соответственно статоров СД и СП.

Рис. 2.22. Индикаторная схема синхронной связи
Обмотки возбуждения СД и СП подключаются к сети переменного тока. Концы одноименных фаз соединяются между собой. Намагничивающая сила, создаваемая обмотками возбуждения, имеет синусоидальное распределение по окружности ротора (статора). Тогда пульсирующий с частотой сети поток возбуждения СД и СП наведет в обмотках синхронизации синфазные ЭДС, отличающиеся по амплитуде:
| Е Д1 = Е cosα1,
|
| E П1 = Е cosα2,
|
| E Д2 = Е cos(α1 – 120o),
|
| E П2 = Е cos(α2 – 120o),
|
| E Д3 = Е cos(α1 + 120o),
|
| E П3 = Е cos(α1 + 120o),
|
откудаследует, что при a1 = a2, Е дj = Е пj (j = 1, 2, 3) токи в линиях связи отсутствуют и система находится в покое. Такое расположение роторов сельсинов называется согласованным. Появление угла рассогласования
q = aд – aп ¹ 0
вызовет токи в цепи синхронизации (см. рис.3):

где Z – полное сопротивление одной из трех обмоток синхронизации. Токи Ij вызовут пульсирующие потоки в обмотках синхронизации, которые, взаимодействуя с потоками возбуждения, создают так называемый синхронизирующий момент, стремящийся уменьшить угол рассогласования q. Следует отметить, что одинаковый по величине, но противоположный по направлению синхронизирующий момент возникает как в сельсине-датчике, так и в сельсине-приемнике. Следовательно, если все обмотки СД и СП соединены правильно, при вращении ротора СД ротор СП будет вращаться в ту же сторону.
Сельсины в индикаторном режиме часто применяются для визуального снятия показаний стрелки, закрепленной на валу СП. Сельсинная пара в этом случае является указателем или индикатором (отсюда происхождение названия режима) относительного положения удаленных от мест наблюдения предметов: телекамеры, кинокамеры, поворота антенн, ворот шлюза и т. д.
При малых углах рассогласования (до 10°…15°) синхронизирующий момент практически пропорционален синусу угла рассогласования:
|
| М с(q) = М с.max.sinq
| (1)
|
где М с – синхронизирующий момент; М с max – максимальный синхронизирующий момент; aд – угол поворота ротора сельсина датчика; aп – угол поворота сельсина приемника.
М с(0) = М с(180) = 0, но положение сельсинов при q = 180° является неустойчивым. Благодаря этому, сельсинная пара в индикаторном режиме обеспечивает синхронизацию угла в пределах одного оборота. Величина
|
| 
| (2)
|
называется удельным синхронизирующим моментом, который может определяться экспериментально из снятой кривой Мс(q).
На основании формул (1) и (2) легко получить выражение, справедливое с точностью до 1%.
М с(q) = М удq,
– 0,24 рад £ q £ 0,24 рад
Если на валу СП имеется момент нагрузки М н, то процесс синхронизации будет всегда заканчиваться при
М с = М н = М удq = М уд(a1 – a2),
откуда
где Δq – абсолютная статическая ошибка сельсинного датчика, которая для одного и того же М н тем меньше, чем больше М уд.
Точность отработки угла сельсинов-приемников характеризуется статической ошибкой. Величину статической ошибки сельсинной пары в индикаторном режиме принято характеризовать средней максимальной ошибкой Dqm, которая определяется как полусумма абсолютных значений максимальных ошибок для двух противоположных направлений вращения в пределах одного оборота.

Погрешность в статическом режиме определяется путем поворота ротора датчика сначала по часовой стрелке на 360°, а затем против часовой тоже на 360°. Измерения производят либо непрерывно с помощью приборов, либо через 1° или через 10° в зависимости от требуемой точности определения погрешности.
Точность работы сельсинов-приемников в индикаторном режиме определяют следующие основные факторы:
2 момент сопротивления, у большинства сельсинов он равен моменту трения М т;
2 добротность сельсина:
Д = М уд/ М т;
– магнитная несимметрия – неравенство магнитных сопротивлений на пути его потока возбуждения при разных положения ротора;
– электрическая несимметрия – неравенство сопротивлений фаз обмоток синхронизации сельсинов и проводов линии связи. Неравенство переходных сопротивлений в контактах щеток;
– небаланс ротора, а так же шкалы или стрелки;
Время успокоения влияет на динамическую устойчивость и точность работы сельсина. Обычно время успокоения равняется 0,5...1,5 с. Для его уменьшения применяют демпфирующие устройства.
Для измерения угла рассогласования двух механически несвязанных валов сельсины соединяются по схеме, изображенной на рис. 2.23, и их режим работы называется трансформаторным.

Рис. 2.23. Принципиальная схема сельсинного датчика в трансформаторном режиме
С однофазной обмотки сельсина-приемника СП снимается напряжение Е ст, т.е. она не подсоединяется к сети и, следовательно, не является обмоткой возбуждения. В этом режиме сельсин-приемник выполняет функции трансформатора (с него снимается не момент, а напряжение) и часто называется поэтому сельсином-трансформатором СТ. Сельсинная пара в трансформаторном режиме является сельсинным датчиком угла рассогласования. Для этого режима токи в линиях связи всегда не равны нулю:
Ij ¹ 0, j = 1,2,3
и, следовательно, всегда магнитный поток обмотки синхронизации сельсина-трансформатора ФСТ ¹ 0 и совпадает с осью или потоком обмотки возбуждения сельсина-датчика ФВД. Надо отметить, что суммарный магнитный поток постоянен по величине, а угол его расположения зависит от угла рассогласования сельсинов.
При согласованном положении осей однофазных обмоток, поток ФСТ наведет во вторичной обмотке сельсина трансформатора максимальную ЭДС, а при рассогласовании на 90° – ЭДС, равную нулю. Тогда очевидно, что выходное напряжение
Е ст = Еm cosq
Сельсинные датчики угла рассогласования используются в следящих системах.
Пусть направление вращения командного и исполнительного валов следящей системы (рис. 2.24)согласовано. Если включенную следящую систему предоставить самой себе, то при a = соnst двигатель будет работать до тех пор, пока ЭДС на выходе сельсина-трансформатора Е ст не станет равной нулю. Тогда q = a1 – a2 = 90°. Следовательно, следящая система развернула ротор сельсина-трансформатора (a2) по отношению к ротору сельсина-датчика (a1) на 90°. Если теперь выставить шкалу или выбрать начало отсчета исполнительного вала так, чтобы a2 = a1, то следящая система в установившемся режиме будет всегда согласована. При этом реализуется зависимость
|
| Е ст = Еm cos(q – 90°) = Em sinq
|
|

Рис. 2.24. Следящая система с сельсинными датчиками работающими
в трансформаторном режиме
Качество работы сельсинов в трансформаторном режиме зависит от следующих факторов:
2 величина остаточного напряжения на выходной обмотке в согласованном положении;
2 удельное выходное напряжение U уд – напряжение при рассогласовании в 1°;
2 удельная выходная мощность Р уд – максимальная мощность выходной обмотки при рассогласовании в 1°;
2 электрическая и магнитная несимметрия;
2 сопротивление линии связи;
2 количество приемников.
Удельное выходное напряжение определяет точность всей системы, которая может быть повышена увеличением числа витков выходной обмотки.
Литература: [1, c. 6 – 29, 32 – 73], [5, c. 18 – 31]








