| Число строк, равное числу каст, К
| Число двигателей в виде, ai
| Число видов с одинаковым числом двигателей, wi
| Число двигателей касты, aiwi
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| …
| …
| …
| …
|
| …
| …
| …
| …
|
| …
| …
| …
| …
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| …
| …
| …
| …
|
| …
| …
| …
| …
|
| ИТОГО:
| S = 449
| U = 3266
|
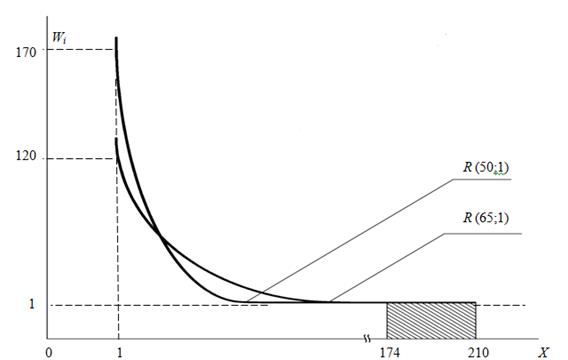
Результаты расчетов основных показателей типовых распределений приведены в табл. II.19, а рис. II.16 поясняет процесс снижения разнообразия электродвигателей, эксплуатируемых на промышленных предприятиях (способ 1).
Сопоставление результатов расчетов трех способов управления типовым распределением электродвигателей позволяет сделать заключение о целесообразности перераспределения электродвигателей первых групп в «хвост» кривой (рис. II.16).
Это уменьшает в большей степени по абсолютной величине параметр a (кривая видового распределения становится более пологой) и числено увеличивает X -ю координату точки R.
Т а б л и ц а II.19
Показатели структур двигателей при различных способах управления
| Способ
управления
| S
| d
| Количество видов, представленных не более чем тремя двигателями, %
| w i
| a
| R
|
|
|
| 7,27
| 55,5
| w1 = 0,267
w2 = 0,198
w3 = 0,062
| −1,08
| 65;1
|
|
|
| 7,27
| 55,5
| w1 = 0,267
w2 = 0,198
w3 = 0,062
| −1,17
| 61; 1
|
|
|
| 7,27
| 55,5
| w1 = 0,267
w2 = 0,198
w3 = 0,062
| −1,14
| 66; 1
|
В тех случаях, когда в видовом распределении относительная частота появления электродвигателей второй группы больше, чем первой, управление структурой следует осуществлять за счет уменьшения числа видов электродвигателей второй группы и увеличения числа видов групп, расположенных правее точки ai = 2 (кривая б рис. II.12).
|
| Рис. II.16 Модель управления структурой
эксплуатируемых электродвигателей
|
Рассмотрим также управление структурой электродвигателей вспомогательных сооружений АЭС (табл. II.12). Эта структура приведена в табл. II.20.

Т а б л и ц а II.20
Структура двигателей вспомогательных сооружений АЭС
| К
| аi
| wi
| aiwi
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| d =4,8
| a = - 1,06
| S = 61
| U = 293
|
| R (17,4; 1)
|
По результатам анализа типов и марок электродвигателей и частичной их замены оказалось возможным получить новую структуру электродвигателей вспомогательных сооружений АЭС. Типовое распределение новой структуры и ее обобщающие показатели приведены в табл. II.21
Т а б л и ц а II.21
Структура двигателей вспомогательных сооружений АЭС
После управления
| Продолжение таблицы II.21
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| d = 4,8
| a = - 1,06
| S = 61
| U = 293
|
| R (17,4; 1)
|
Из сопоставления данных табл. II.20 и табл. II.21 следует, что в результате воздействия на структуру электродвигателей вспомогательных сооружений:
- уменьшилось число групп и видов электродвигателей;
- несколько увеличилось численное значение показателей «средняя повторяемость вида»;
- уменьшилось число типов электродвигателей первых групп (стало 45,7 %).
Исследования показывают, что анализ ремонтируемого оборудования, воздействие на структуру установленного электрооборудования на промышленных предприятиях в направлении унификации совокупности при проектировании, техническом перевооружении и модернизации позволяют перейти к серийному производству ремонтных работ.
Себестоимость и трудоемкость ремонта электродвигателей изменяются по гиперболическому закону. В результате обработки материалов опросов специалистов электроремонтных служб было установлено, что показатель степени снижения трудоемкости электродвигателей (Z) однородными партиями изменяется в пределах 0,1 - 0,4. Большее значение этого коэффициента имеют предприятия, располагающие хорошей электроремонтной базой. На рис. II.17 показано изменение трудоемкости капитального ремонта асинхронного электродвигателя с короткозамкнутым ротором напряжением до 500 В и P н = 30 кВт (T рем = 45 чел. ч.) в зависимости от объема ремонтной партии. Пунктирными линиями обозначены предельно возможные значения трудоемкости ремонта. Производство электроремонтных работ электродвигателей партиями обеспечивает повышение производительности труда на основных участках электроремонтного цеха на 8 - 10 %
|
| Рис. II.17 Зависимость трудоемкости от величины ремонтной партии
|
Реальное уменьшение трудоемкости ремонтов (обслуживания) можно достичь при объеме ремонтных партий: для простых по конструкции электродвигателей порядка пяти единиц; для электродвигателей сложной конструкции – десяти. Заметного снижения фактической трудоемкости при больших ремонтных партиях не происходит из-за практически установившихся навыков и приемов работы ремонтными работниками.
Традиционно при изучении электротехнических совокупностей промышленных предприятий электрооборудование рассматривалось как элемент этой системы, далее неделимый. Такой подход приемлем при решении таких задач, как прогнозирование входящего ремонтного потока, точное определение и планирование объемов и трудоемкости ремонтных работ. Но всякое электрооборудование является композиционным целым, то есть состоит из составных частей, деталей и т.д. Например, электродвигатель вида 4АНК315S4У3 Р н = 200 кВт содержит 25 наименований сборочных единиц и деталей, а их общее количество составляет 898 единиц. Следовательно, при техническом обслуживании и ремонте важно знать не только какой вид электродвигателей выйдет из строя, но и какие составляющие их будут необходимы при ремонте.
В связи с этим декомпозиция электрооборудования на составляющие его элементы-компоненты и изучение закона их распределения на основе системного анализа позволяют повысить эффективность обеспечения комплектующими и материалами. В качестве объектов исследования могут использоваться месячные, квартальные, полугодовые и годовые выборки электродвигателей, поступающих в ремонт. Затем каждый электродвигатель разбивается на составляющие элементы, и анализируются выборки по элементам.
Анализ типовых распределений этих элементов показал, что численные значения характеристического показателя a находятся в пределах 0,3 - 1,5. При этом значения a для типовых распределений электродвигателей и преобразователей (электродвигатель и преобразователь образуют регулируемый электропривод) за один и тот же период времени выше, чем у компонентов, например, подшипников, обмоточных проводов и конденсаторов. Это обусловлено тем, что одноименные элементы-компоненты различных видов электродвигателей могут совпадать (виды подшипников, обмоточных проводов, крепежа, резисторов и т.д.).
Общий характер распределений множества электродвигателей и множества их элементов-компонентов по повторяемости типов совпадают. Поэтому видовое распределение электродвигателей (как и другого электрооборудования) можно представить как иерархическую модель видовой структуры (рис. II.18). На высшем уровне рассматриваются видовые распределения множества электродвигателей предприятия (первый уровень), а на низшем уровне (второй уровень) – видовые распределения множества элементов-компонентов этих электродвигателей. Этот второй уровень может быть представлен двумя подуровнями, где первый подуровень – элементы-компоненты электродвигателей, а второй подуровень – элементы-компоненты различных полупроводниковых преобразователей электроприводов. По объему выборки первый подуровень более представителен, чем второй за счет нерегулируемых электроприводов предприятия.
|
| Рис. II.18. Двухуровневая иерархическая модель
|
Практическое применение такой иерархической модели электроприводов промышленных предприятий обеспечивает: уменьшение номенклатуры запасных элементов-компонентов электроприводов, что определяется логистическим подходом к ремонтам, особенно при преобладающем децентрализованном его проведении; более реалистические прогнозы в потребности элементов-компонентов электродвигателей; векторную оптимизацию всех ресурсов предприятия.
Такая двухуровневая модель реализована на одном из машиностроительных предприятий Приволжского федерального округа.
Изменение численности отдельных типов электродвигателей, поступающих в ремонт за определенный период времени (месяц, квартал, год и т.д.), может быть описано временными рядами аналогично тому, как это сделано для элементов-компонентов электродвигателей.
Оценка напряженности выполнения планов
Электроремонтных работ
Сложившийся в настоящее время метод определения электроремонта предполагает наличие списка электрооборудования, составленного в соответствии с действующей системой ППР, с указанием для каждой конкретной единицы оборудования нормативов трудоёмкости, определённых для данного вида ремонта и детализированных в зависимости от содержания работ. Общая трудоёмкость исчисляется суммой трудоёмкостей по группам электрооборудования при выполнении определённого вида работ, хотя трудоёмкость работ в значительной степени определятся числом однородных изделий в группе.
Для исследования влияния структуры множества эксплуатируемых электродвигателей на обслуживание и ремонт предложено уравнение взаимосвязи суммарной трудоёмкости электроремонта T å с параметрами видового распределения, учитывающее существование в типовых распределениях партий однотипных электродвигателей, а также снижение трудоёмкости выполнения работ при увеличении партий однородных электродвигателей
 , ,
| (II.35)
|
где  – трудоёмкость ремонта первого электродвигателя однородной партии, состоящей из i электродвигателей;
– трудоёмкость ремонта первого электродвигателя однородной партии, состоящей из i электродвигателей;
 – трудоёмкость ремонта электродвигателя средней мощности с учётом процентного содержания электродвигателей различной категории сложности;
– трудоёмкость ремонта электродвигателя средней мощности с учётом процентного содержания электродвигателей различной категории сложности;
Z – коэффициент, характеризующий интенсивность технологического выполнения работ, т.е. снижение трудоёмкости фактически выполненной работы по обслуживанию каждого последующего привода в однородной партии (за счёт уменьшения времени на переналадку оборудования, освоения ремонтниками наиболее эффективных приёмов работы, повышения использования специализированного оборудования и инструмента, улучшения использования материалов, внедрения прогрессивных технологических процессов).
Как правило, эффект снижения трудоёмкости не определяется, ввиду сложности учёта, отсутствия сведений о структуре множества установленного на предприятии оборудования, но он проявляется в разной напряжённости рабочего дня для двух бригад электриков, когда в одну смену приходится ремонтировать различные электродвигатели, а в другую (при одинаковой расчётной трудоёмкости выполнения работ за смены) происходит случайное образование серий, что повышает производительность труда.
Выбранный в соответствии с методологией, изложенной в предыдущих главах, электродвигатель необходимо проверить по видовой структуре общего перечня уже существующих приводов промышленного предприятия. Если вновь устанавливаемый электродвигатель находится в группе с порядковым номером более единицы (k > 1), то фактическая трудоёмкость его ремонта (обслуживания) составит (рис. II.17)
 , ,
| (II.36)
|
где  – трудоёмкость первого отремонтированного (обслуженного) электродвигателя;
– трудоёмкость первого отремонтированного (обслуженного) электродвигателя;
N – количество однотипных электродвигателей в ремонтной группе.
Уменьшение трудоёмкости, рассчитанной по одному из методов (пропорционально стоимости или номинальным параметрам, через трудоемкость соответствующих работ), по сравнению с ремонтом (обслуживанием) одного электродвигателя происходит в  . Приведённые затраты на этот электродвигатель также уменьшаются за счёт сокращения издержек, связанных с его ремонтом и обслуживанием.
. Приведённые затраты на этот электродвигатель также уменьшаются за счёт сокращения издержек, связанных с его ремонтом и обслуживанием.
Отношение трудоёмкости, рассчитанной по уравнению (II.35), к трудоёмкости, рассчитанной без учёта коэффициента  , даёт количественную оценку напряжённости выполнения электроремонтных работ по структуре множества электродвигателей:
, даёт количественную оценку напряжённости выполнения электроремонтных работ по структуре множества электродвигателей:
 . .
| (II.37)
|
Предельное значение H т = 1 означает, что рассматриваемая структура представлена только различными электродвигателями, разнотипными партиями, в которых не может происходить снижение трудоёмкости при ремонте и обслуживании (самый неэффективный случай построения структуры). Уменьшение величины H т свидетельствует о снижении разнообразия, появлении видов, представленных большим числом электродвигателей.
Показатель Н т, являясь оценкой оптимальности построения структуры по критерию затрат на электроремонт, позволяет определить, на сколько может быть снижена трудоёмкость выполнения электроремонтных работ при данном построении структуры (видовом распределении), например, для Борского стекольного завода Н т = = 0,907.
Резерв повышения эффективности электроремонтного производства, скрытого в структуре множества эксплуатируемых электродвигателей, может быть выражен в процентах показателя Н т.
Выявление резерва и оперирование видовыми распределениями при ремонте электродвигателей позволяют оценить эффективность организации ремонта партиями, оптимизировать обменный фонд, осуществить выравнивание план-графиков ППР по трудоёмкости. При этом следует иметь в виду, что, как отмечалось ранее, электродвигатели ремонтируются в основном децентрализованным путём.
Зависимость трудоёмкости ремонта от структуры видового распределения делает правомочным вопрос об управлении структурой (разнообразием) в целях улучшения (уменьшения численного значения) показателя Эв (эффект управления) при техническом перевооружении, замене, заказе, поставке оборудования. Ниже приводятся выражения этого эффекта:
 %. %.
| (II.38)
|
Здесь

|
|
 , ,
| (II.39)
|
где – a1, a2., W 01, W 02 – параметры видовых распределений до управления (это индекс 1) и после управления (это индекс 2); b – параметр, аналогичный коэффициенту z в уравнениях (II.35) - (II.37).
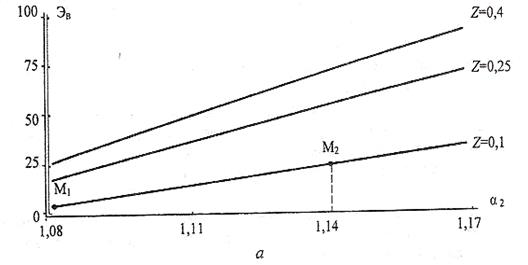
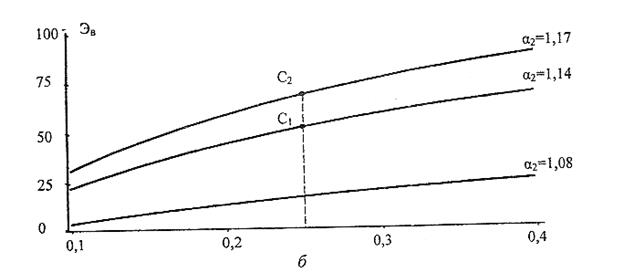
В соответствии с (II.38) на рис II.39 приведены зависимости ЭВ в функции реальных численных значений  и
и  , указанных в табл. II.19 и на рис II.17
, указанных в табл. II.19 и на рис II.17
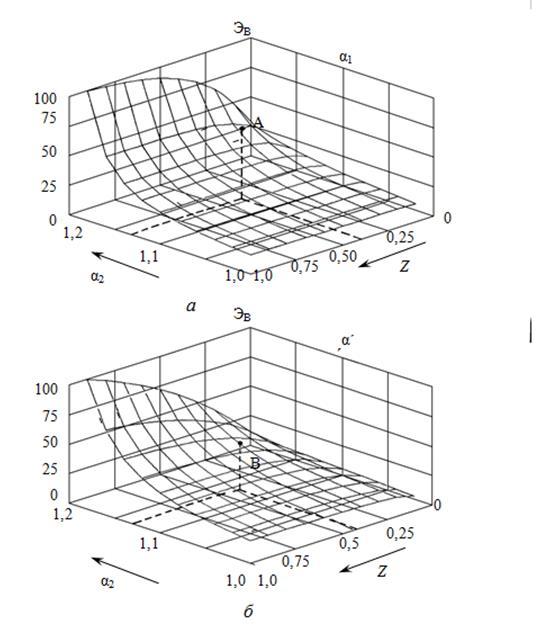
Анализ этих зависимостей показывает, что Эв в большей степени зависит от a2. Так, например, при увеличении a2 с 1,08 до 1,14 (значение a2 в соответствии с табл. II.19 увеличилось на 5,5 %) и z = 0,1 относительное значение эффекта увеличивается в 2,5 раза (точки М1 и М2 рис. II.19, а), а при изменении z на 5 % (от 0,1 до 0,105) и a2 = 1,08 Эв увеличивается на 12 %. При изменении a2 от 1,08 до 1,14 и 1,17 (это соответствует переходу управления видовой структурой от способа 1 к способам 2 и 3 – табл. II.19) и постоянном z = 0,25 (рис. II.17) относительный эффект увеличивается в 2,3 и 2,6 раза, что соответствует точкам С1 и С2 – рис. II.19, б. В условиях промышленных предприятий одновременно могут изменяться a2 и z. В этих случаях численное значение относительного эффекта меняется по поверхности, представленной на рис. II.20.
|
|
| Рис. II.19. Эффект управления:
а – при z = const и α2= var; б – при α2= const и z = var
|
|
| Рис. II.20. Зависимость эффекта управления от
α2 и Z: а – при α1; б – при α´1>α1
|
При уменьшении численного значения a1 в уравнении (II.38) на 10 % (до значения a1) и постоянных a2 и z, эффект управления Эв уменьшается приблизительно на 25 % (уменьшение координаты Эв точки В – рис. II.20, б в сравнении с точкой А – рис. II.20, а).
Моделирование процесса управления структурой генеральной совокупности электродвигателей Борского стекольного завода дало возможность сделать вывод о том, что управление структурой и внедрение в практику расчётов трудоёмкости ремонтных работ по уравнению (II.35) позволяют повысить расчётную производительность на 18 - 20% и на 5 - 8 % снизить затраты на ремонты.
Отметим, что проблема управления структурой множества эксплуатируемых на предприятиях электродвигателей имеет народнохозяйственное значение и должна решаться на уровне плановых органов предприятий. Однако каждое промышленное производство отличается от других и имеет свои собственные неповторимые особенности, поэтому общего универсального видового распределения электродвигателей существовать не может. Для каждого предприятия необходимо определить конкретное, только ему свойственное видовое распределение, и уже, опираясь на эту существующую видовую структуру электродвигателей, производить возможное её улучшение с точки зрения трудоёмкостей электроремонтных работ.
В заключение данной главы приведем количественную динамику только установленных электродвигателей и преобразователей за пятилетний период на одном из предприятий – ОАО «ММК» (табл. II.22) из которой следует, что совершенствованием генеральной совокупности установленного оборудования необходимо заниматься. Из этой же таблицы следует, что в 2004 г. 4,13 %, 2005 г. 4,90 %, 2006 г. 5,92 %, 2007 г. 4,35 % и 2008 г. 4,52 % электроприводов имели в своей структуре преобразователи, используемые для регулирования скорости и облегчения пуска электропривода.
Т а б л и ц а II.22