Суть кинематического ПО (как для ИСО, так и для неИСО) заключается в том, что одни и те же процессы, объективно протекающие в природе, воспринимаются различными наблюдателями (из разных СО) по-разному и, естественно, исходя из этого субъективного восприятия, и описываются по-разному, т.е. разными формулами, но при этом расчеты по этим разным формулам дают одинаковый результат. Например, наблюдение за планетами нашей Солнечной системы из разных СО даст разные результаты для кинематического описания их поведения. Если наблюдатель будет находиться высоко над плоскостью эклиптики точно над Солнцем и будет перемещаться вместе с Солнцем, то он увидит в декартовой системе координат, привязанной к точке отсчета расположенной над Солнцем, т.е. в движущейся ИСО, картину изображенную на рис. 1a, где Солнце будет покоиться, а планеты будут двигаться вокруг него по эллипсам. А, если наблюдатель так и будет оставаться неподвижно в этой точке отсчета, а вся Солнечная система будет пролетать мимо него вправо, то он увидит в своей неподвижной системе координат, что планеты движутся по траекториям изображенным на рис. 1b. И теоретически та же самая картина будет наблюдаться, если Солнечная система будет покоиться, а наблюдатель будет двигаться вместе со своей ИСО. Здесь уже Солнце в этой СО будет двигаться по прямой, а планеты будут описывать циклоиды с проскальзыванием, т.е. их траектория будет как у точки на ободе колеса, которое катиться по опорному основанию с проскальзыванием.
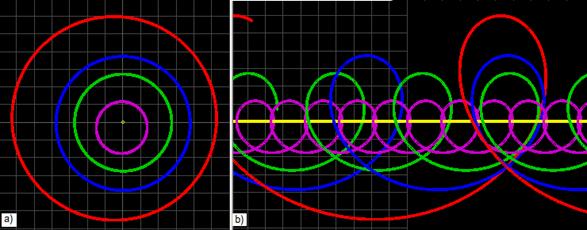
Рис. 1 (a, b). Траектории движения планет Солнечной системы (от Меркурия до Марса), которые увидит за какой то промежуток временем наблюдатель, находящийся неподвижно в одной точке над плоскостью эклиптики. a) - Солнечная система покоится относительно наблюдателя. b) - Солнечная система движется относительно наблюдателя вправо. Скриншоты программы Solsys7.
Но еще более запутанную картину увидит наблюдатель, который будет так же находиться над плоскостью эклиптики, но будет перемещаться вместе с Землей. В этой системе координат, где точкой отсчета будет положение Земли, траектории планет и Солнца будут видны так, как показано на рис. 1c. А, если мы будем наблюдать за движением планет, находясь непосредственно на Земле, т.е. в плоскости эклиптики, то картинка будет совсем удручающая, т.к. планеты будут видны нам практически только в одной плоскости и мы сможем наблюдать только то, что они поворачиваются вокруг нас то быстрее, то медленнее, а иногда и движутся в обратную сторону. Поэтому, я восхищаюсь тем, что Птолемей, опираясь на труды Гиппарха и других ученых того времени, смог создать по данным таких наблюдений кинематическую теорию планет, где планеты вместе с Солнцем вращаются вокруг Земли (только Меркурий и Венера при этом вращаются еще и вокруг Солнца). То, что позже Коперник создал свою кинематическую теорию планет, где все планеты вращаются вокруг Солнца, это я могу понять, но, как древние ученые смогли точно описать движение Солнца и планет это для меня непостижимо. Тем более что координаты планет по теории Птолемея (если в ней исправить прецессию) вычисляются даже более точно, чем по теории Коперника, и его теорию можно использовать в некоторых расчетах даже сейчас.

Рис. 1 (c). Траектории движения Солнца и планет Солнечной системы (от Меркурия до Марса, но без Венеры, т.к., чтобы не затенять рисунок, я ее при моделировании удалил из системы), которые видит наблюдатель, находящийся над плоскостью эклиптики в точке отсчета движущейся вместе с Землей, которая на рисунке расположена в начале системы координат. Скриншот программы Solsys7.
Резюмируя сказанное, можно сказать, что принципиальным отличием этих двух теорий является то, что они описывают движение планет и Солнца с точки зрения наблюдателей, находящихся в разных точках отсчета в сферической или декартовой системе координат, т.е. в разных СО. При этом Коперник, который был священником, писал, что этот чисто математический прием, когда он поместил в центр мира не Землю, а Солнце, он применил только для упрощения расчетов и в предисловие к его книге, которая посвящалась папе Римскому, тоже говорилось только о математике, но быстрее всего он считал, что так оно и есть на самом деле. А заставило его сделал это то, что в то время бурно развивалось мореплавание и капитанам кораблей нужны были простые расчеты позволяющие определить координаты их кораблей, а также в то время очень нужны были более точные расчеты календаря, которые бы опирались на астрономические наблюдения. В обоснование своего кинематического ПО Коперник [45] приводит следующий пример:
“Так, при движении корабля в тихую погоду все находящиеся вне представляется мореплавателям движущимся, как бы отражая движение корабля, а сами наблюдатели, наоборот, считают себя в покое со всем с ними находящимся. Это же, без сомнения, может происходить и при движении Земли, так что мы думаем, будто вокруг нее вращается вся Вселенная”.
Таким образом, говоря языком математики, Коперник тут заявил о том, что кинематическое описание, наблюдаемых нами явлений, зависит от выбранной точки отсчета в какой-то системе координат, из которой наблюдатель видит эти явления, и он выбрал за точку отсчета Солнце, когда мы получаем самое простое описание этих явлений, которое позволяет нам получить тот же результат, что и более сложное описание Птолемея. Да, не смотря на то, что у Коперника была использована правильная теория движения планет, точность таблиц Коперника оказалась хуже, чем таблиц Птолемея, т.е. они давали немного другой результат, но я сейчас, обработав данные наблюдений различных обсерваторий мира за последние 200 лет, создал с использованием кинематического ПО гелиоцентрическую кинематическую теорию планет Ser0 [72], которая гораздо лучше описывает поведение планет, чем геоцентрическая кинематическая теория Птолемея. Поэтому, нельзя говорить, что гелиоцентрическая кинематическая теория лучше, чем геоцентрическая и наоборот. Они одинаково описывают поведение планет, а их точность зависит от качества наблюдаемых данных и от методики обработки этих данных.
При этом, например, моя кинематическая теория планет Ser1+, где + обозначает, что я получил ее дополнив данные наблюдений современных астрономов данными наблюдений древних астрономов, описывает поведение планет в прошлом гораздо лучше, чем самые современные динамические теории планет, т.е. созданные с использованием физических теорий, такие как лаборатории JPL (подразделение НАСА) или лаборатории Питьевой (подразделение ИПА РАН). Вот, например, как описывают солнечное затмение 15.04.-135 года наблюдавшееся в Вавилоне (см. табл. 1) современные динамические теории, а конкретно теория лаборатории реактивного движения JPL1 и Ньюкома New1, а также две кинематические теории - моя Ser1+, где цифра 1 означает, что в теории учтены периодические возмущения от других планет (но, т.к. они меня не очень интересовали, то в моей теории они учтены только частично), и Птолемея (Almagest*, где звездочка обозначает то, что я в его таблицах исправил расчет прецессии).
Таблица 1. Параметры солнечного затмения 15.04.-135 года наблюдавшегося в Вавилоне (долгота 44,5 в.д., широта 32,5 с.ш.) и полученные по современным теориям и по таблицам Птолемея. Для современных динамических теорий эфемеридные поправки ET-UT рассчитаны как по формуле Далмау, так и по формуле Джонса (в минутах). Время дано местное (Вавилон) солнечное. Данные по таблицам Птолемея приведены с исправленной прецессией и выполнены на 21.07.612 года по Египетскому календарю. Воспроизведено из работы [72].
|
Название таблиц, теорий
| Фаза
в %
| Восход
| Начало
| Начало полного
| Конец
| Итого
|
| Наблюдаемые данные
| 100
| 05:34
| 07:10
| 08:22
| 09:30
| 02:20
|
| JPL1 ET-UT=0
| -5
| 05:33
| -
| 15:21
| -
| -
|
| JPL1 ET-UT=182,5 Джонс
| 70
| 05:34
| 09:33
| 10:45
| 12:01
| 02:28
|
| JPL1 ET-UT=196,5 Далмау
| 75
| 05:34
| 09:14
| 10:29
| 11:43
| 02:29
|
| New1 ET-UT=0
| -60
| 05:33
| -
| 14:40
| -
| -
|
| New1 ET-UT=182,5 Джонс
| 40
| 05:34
| 09:38
| 10:25
| 11:10
| 01:38
|
| New1 ET-UT=196,5 Далмау
| 60
| 05:34
| 09:16
| 10:06
| 10:56
| 01:40
|
| Ser1+ ET-UT=0
| 100
| 05:34
| 07:41
| 08:45
| 09:57
| 02:16
|
| Almagest* ET-UT=0
| 99
| 05:31
| 07:08
| 08:14
| 09:24
| 02:16
|
Как видим современные динамические теории (даже при учете периодических возмущений), хотя и удовлетворительно описывают современные затмения, но без наличия эфемеридной поправки ET-UT совершенно отказываются описывать затмения давно минувших дней. У них получается фаза затмения -5% и -60%, т.е. это не процент перекрытия диском Луны (по диаметру) диска Солнца, а наоборот процент в диаметрах Солнца, от расстояния на которое диск Луны даже не дошел до диска Солнца и время указано для момента, когда он максимально приблизился к Солнцу. Да, подбором эфемеридной поправки ET-UT, т.к. мы пока не умеем ее именно рассчитывать, иногда удается добиться того, что совпадет или время начала затмения или мы получим фазу затмения 100%, но совпадения и времени и 100% фазы удастся добиться в единичных случаях. А в нашем примере не удалось добиться ни того, ни другого, а вот обе кинематические теории дают отличное совпадение наблюдаемых и расчетных данных и таким образом подтверждают справедливость кинематического ПО. Ну, а современные теории планет позволяют нам удовлетворительно рассчитывать положения планет только в небольших интервалах от нашего времени, когда различные малые изменения параметров орбит планет и погрешность в расчете эфемеридной поправки ET-UT не смогут существенно повлиять на результат. Напоминаю, что для расчета по современным динамическим теориям необходимо эфемеридное (математическое) время, а не наше солнечное время, по которому мы живем, глядя на наши часы, а на малых интервалах от текущего времени оно будет незначительно отличаться от солнечного времени.
Таким образом, применение кинематического ПО, который является общим ПО, т.е. применим как для ИСО, так и для неИСО, упрощает решение очень многих кинематических задач, когда мы можем вместо абсолютных скоростей тел использовать их относительные скорости. Вот только применять этот принцип для перехода при расчетах из одной СО в другую СО с использованием преобразований Галилея мы можем только с использованием не видимых, а истинных координат объектов. И приведенные выше рисунки наблюдаемых положений планет при разном положении наблюдателя соответствуют скорости передачи сигнала равной бесконечности, т.е. отражают истинное, а не видимое, положение планет. Да, при скорости сигнала равной скорости света мы будем наблюдать практически такую же картину и на глаз будет невозможно отличить две траектории (по истинным координатам и по видимым), но астрономы после того, как была определена скорость света, все же различают истинные координаты (они их называют геометрическими) и видимые, т.е. непосредственно наблюдаемые из конкретной СО, где такой СО обычно является планета Земля. И для вычисления истинных координат они определяют время движения света от планет до наблюдателя, которое необходимо для учета относительности одновременности наблюдения планет, а потом продвигают наблюдаемые положения планет вперед на расстояние, которое прошли планеты за то, время, что свет двигался от планет до наблюдателя, и находят истинные координаты планет, которые будут у них в момент их наблюдения.
Но, если абсолютная скорость ИСО или неИСО, в которой мы производим кинематические расчеты, сопоставима со скоростью передачи сигнала, то, даже при учете времени движения сигнала от объекта до наблюдателя, чтобы учесть относительность одновременности, у нас будет погрешность в расчетах видимых размеров тел. Например, смотрите рис. 2, где я привожу расчеты сделанные на программе Galiley1 по определению видимой длины стержня, движущегося со скоростью 2 м/с в АСО и наблюдаемого из ИСО, движущейся со скоростью 10 м/с относительно АСО, при скорости распространения световых сигналов в АСО от двух концов стержня 20 м/с. На рис. 2а я производил расчеты в ИСО, где покоится наблюдатель, с использованием преобразований Галилея для расчета скорости стержня и скорости распространения световых сигналов относительно ИСО, а на рис 2b я производил все расчеты в АСО, т.е. использовал абсолютные скорости и стержня и световых сигналов, но при этом мне пришлось использовать в расчетах и абсолютную скорость наблюдателя, т.к. в АСО он тоже будет двигаться, что значительно усложнило расчеты, но сделало их абсолютно безупречными, т.к. отпадает вопрос о справедливости применения в этих расчетах преобразований Галилея.
Подробно на этих расчетах я остановлюсь далее, когда буду рассматривать вопрос относительности одновременности и получающиеся при этом геометрические и кинематические размеры тел у Эйнштейна в его СТО, которыми он называет истинные и видимые размеры тел, а сейчас только скажу, что в этих расчетах я сначала находил время движения световых сигналов, вылетевших одновременно, от двух концов стержня до наблюдателя (отражено на правых рисунках для зеленого стержня, имеющего реальную длину 100 м), а затем определял координаты или левого или правого концов стержня, когда световой сигнал вылетал от него не одновременно с сигналом от другого конца стержня, но приходил к наблюдателю одновременно (отражено на левых рисунках, где стержни изображены красным цветом). При этом, видимая длина (dX) нижнего красного стержня, рассчитана, когда уточнялись видимые координаты правого конца стержня так, чтобы световой сигнал от него пришел к наблюдателю одновременно со световым сигналом, пришедшим от левого конца стержня за время Т1, т.е. получается dX1, а видимая длина верхнего красного стержня получена при уточнении координат левого конца стержня для времени Т2, т.е. получается dX2.
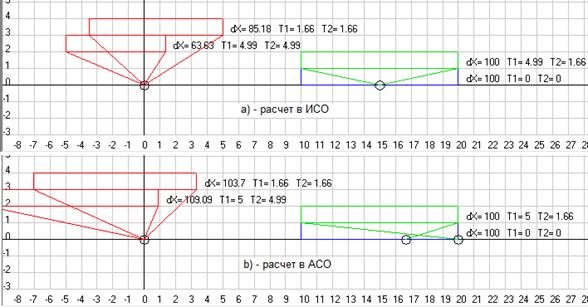
Рис. 2. Расчет видимой длины стержня движущегося в АСО со скоростью 2 м/с и наблюдаемого из ИСО движущейся относительно АСО со скоростью 10 м/с при скорости распространения световых сигналов от двух концов стержня до наблюдателя, который находится в ИСО, 20 м/с. а) - расчет выполнен в ИСО. b) - расчет выполнен с абсолютными скоростями в АСО. Скриншоты программы Galiley1.
Как видим, даже чисто кинематический результат, т.е. полученный без использования физических законов, а именно наблюдаемые одновременно координаты двух концов стержня, которые дадут не реальную, а видимую длину стержня, будет разный при расчетах выполненных в АСО и в ИСО. Но, если скорость СО, из которой мы наблюдаем за какой то системой тел, находящейся в исходной СО, гораздо меньше скорости распространения световых сигналов, то погрешность в таких расчетах с использованием кинематического ПО, т.е при расчетах в произвольной СО по видимым одновременно координатам тел становится очень маленькой. Например, при скорости стержня в АСО и скорости ИСО относительно АСО равных 2 м/с мы получим в АСО видимые размеры стержня dX1=101,01 м и dX2=101,01 м, а при расчете в ИСО у нас получатся dX1=100 м и dX2=100 м, но и с ростом скорости стержня в АСО погрешность тоже будет расти, хотя и не так заметно как от скорости ИСО относительно АСО, и при его скорости в АСО 10 м/с, т.е. 50% от скорости света, мы получим при расчете в АСО dX1=103,70 м и dX2=109,09 м, а при расчете в ИСО dX1=102,96 м и dX2=107,27 м. Но даже в этом случае применять кинематический ПО для расчетов в произвольной СО все же следует только с использованием реальных, а не видимых одновременно, координат и скоростей.
А в обыденной жизни мы таких больших скоростей и СО и самих наблюдаемых тел в исходных СО не встречаем и поэтому сложилось устойчивое мнение о том, что кинематический ПО в природе выполняется при любых условиях даже для видимых координат. Но, когда ученые столкнулись с наблюдением и описанием явлений, где скорости объектов были соизмеримы со скоростью передачи сигнала, и с описанием самих сигналов, в качестве которых рассматривался свет, то эта святая вера во всемогущество кинематического ПО сыграла с ними злую шутку, приведя науку в конце 19-го и начале 20-го века к острому кризису. Сейчас считается, что создание Эйнштейном динамического ПО, согласно которому все явления, хотя и будут наблюдаться не одинаково при разной скорости прямолинейного и равномерного движения наблюдателя со своей ИСО, т.к. будут, например, в одной ИСО давать одну видимую длину стержня, а в другой ИСО другую, но будут описываться в этих ИСО одними и теми же физическими законами и, как и при кинематическом ПО, дадут одинаковый результат расчета, позволило преодолеть этот кризис, но на самом деле это только перевело кризис в хроническую фазу.






