При неопределенности момента времени появления сигналов тактовой частоты передатчика схема тактовой синхронизации идеального приемника должна обеспечивать совпадение с тактовой частотой передатчика с точностью до фазы. Таким образом, эта схема должна измерять случайный временной сдвиг t между тактовыми частотами передатчика и приемника. По результатам этих измерений получать оптимальную оценку  и компенсировать ее значение.
и компенсировать ее значение.
Оценивание реализуют [3] по алгоритму максимального правдоподобия (МП), обеспечивающему максимум функции правдоподобия  :
:
 (1.1)
(1.1)
либо по алгоритму максимума апостериорной вероятности (МАВ)
 (1.2)
(1.2)
При этом в алгоритме МП вектор  принимается как детерминированный, но неизвестный, а в алгоритме МАВ – случайным с априорной плотностью вероятностей
принимается как детерминированный, но неизвестный, а в алгоритме МАВ – случайным с априорной плотностью вероятностей  .
.
Если неизвестна, то при синтезе принимают это распределение равновероятным во всей области значений  . В этом случае оценка
. В этом случае оценка  , максимизирующая
, максимизирующая  , максимизирует и
, максимизирует и  .
.
Найдем алгоритм реализации схемы синхронизации. Будем полагать, что идеальный когерентный демодулятор (Рис.1.1) переносит спектр входной смеси сигнала и аддитивного белого гауссовского шума (АБГШ)
 (1.3)
(1.3)
из ВЧ в НЧ область без межсимвольных искажений (МСИ) и изменения статистики шумов.
Поэтому наблюдаемый демодулированный НЧ сигнал тактовой частоты передатчика на входе измерителя t и детектора можно записать в виде непрерывной реализации
 , (1.4)
, (1.4)
где  – АБГШ с односторонней СПМ N 0 и средней мощностью (как и в [2, (2.21´)])
– АБГШ с односторонней СПМ N 0 и средней мощностью (как и в [2, (2.21´)])  ;
;
u (t) – ожидаемый модулирующий сигнал тактовой частоты передатчика.
Для наблюдаемой реализации  можно показать (по аналогии с выражением для функционала [2, (2.21´)] или его логарифма [2, (2.23)]), что для решаемой задачи синхронизации максимум функции , т.е. функционала правдоподобия
можно показать (по аналогии с выражением для функционала [2, (2.21´)] или его логарифма [2, (2.23)]), что для решаемой задачи синхронизации максимум функции , т.е. функционала правдоподобия  при известном значении t i или минимум его логарифма
при известном значении t i или минимум его логарифма

обеспечивается при максимуме интеграла [2, (2.24)]
 , (1.5)
, (1.5)
где Т0 -длительность интервала синхронизации.
При произвольном (неизвестном) временном сдвиге t согласно алгоритму МП (1.1) в качестве оценки будем принимать значение t, обеспечивающее максимум функционала (1.5)
 (1.6)
(1.6)
Таким образом, для оптимальной по алгоритму МП тактовой синхронизации необходимо в течение Т0 вычислять корреляционный интеграл в одной из двух форм записи (1.6). Затем обеспечить поиск по t нулевого значения производной этого интеграла и его поддержание (т.е. максимума интеграла), что может быть реализовано на основе петли ФАПЧ.
Отметим, что принимаемый n(t) и ожидаемый u (t) сигналы в интегралах (1.6) должны быть в явном виде периодическими сигналами определенной формы с линейным спектром дискретных частот.
Пример 1. Корреляционная схема синхронизации замкнутого типа.
На рис 1.2 представлена корреляционная схема реализации алгоритма МП (1.6) на основе петли ФАПЧ и временные диаграммы её работы в установившемся режиме (нулевом значении ошибки) на входе генератора, управляемого напряжением (ГУН).
Рис.1.2.Схема синхронизации замкнутого типа на основе петли ФАПЧ
В идеальном случае согласно (1.6) сигнал ГУН должен совпадать по форме с ожидаемым сигналом u (t) тактовой частоты передатчика. На практике сигнал ГУН является меандром со скважностью 1. Производной этого меандра является последовательность знакопеременых коротких синхроимпульсов переднего и заднего фронтов с интервалом, равным длительности информационного символьного интервала Тс =1/ R.
При рассинхронизации (фазовом сдвиге между f Т и f n передатчика) тактовые синхроимпульсы ГУН умножаются (рис.1.2) на ненулевое значение импульсов принимаемого сигнала ν(t) тактовой частоты. В результате происходит накопление положительного или отрицательного значения сигнала ошибки, который изменяет частоту ГУН. В установившемся режиме короткие синхроимпульсы совпадают во времени с переходом через нуль принимаемого сигнала ν(t) тактовой частоты передатчика. Синхронизированные импульсы f Т ГУН используются в детекторе информационного сигнала и определяют границы анализа принимаемого цифрового сигнала.
При пакетной синхронизации петля ФАПЧ в конце пакета размыкается и ГУН работает в автономном режиме (на своей стабильности).
Преимущества схем замкнутого типа:
- поддерживает синхронизацию при пропадании сигнала.
Недостатки:
- сложность, неустойчивость при малых отношениях сигнал/шум;
- большое время установления частоты ГУН.
Пример 2. Корреляционная схема синхронизации открытого типа (фильтровая).
Известно, что линейный коррелятор и согласованный фильтр (СФ) эквивалентны. Если в спектре принимаемого информационного или сигнала тактовой частоты присутствует тактовая частота f Т в явном виде (например[3], RZ -сигнал), то схема детектора МП с синхронизацией на основе СФ имеет вид рис.1.3:
Рис.1.3. Детектор МП с синхронизацией на основе СФ
Преимущество: - простота реализации и быстрая установка частоты.
Недостатки:
- необходимо точное уравнивание времени обработки информационного сигнала и времени восстановления тактовых синхроимпульсов;
- пропадание синхронизации при замирании сигнала.
На практике фильтровая открытая схема используется параллельно с замкнутой схемой на основе петли ФАПЧ, а СФ тактовой частоты реализуют рециркулятором рис. 1.4, где Т0 = 2Тс (см. раздел 3[2]).
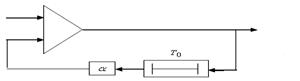
Рис.1.4 Рециркулятор и модуль его АЧХ.
Можно показать, что импульсная характеристика рециркулятора и соответствующая ее преобразованию Фурье комплексная амплитудно-частотная характеристика (АЧХ) имеют вид:
 , (1.7)
, (1.7)  . (1.8)
. (1.8)
При этом модуль АЧХ
 (1.9)
(1.9)
является периодической функцией частоты и имеет вид гребёнки с максимумами, равными  при частотах
при частотах  , т.е.
, т.е.  , где m = 0,1,2,…. При
, где m = 0,1,2,…. При  имеет место отрицательная ОС и значение модуля АЧХ равно
имеет место отрицательная ОС и значение модуля АЧХ равно  . Такие фильтры называют гребенчатыми.
. Такие фильтры называют гребенчатыми.
1.1.2. Синхронизация по информационному цифровому сигналу.
При синхронизации по неизвестному информационному сигналу необходима дополнительная его обработка, т.к. в общем случае этот сигнал не содержит в явном виде тактовую частоту f n передатчика и ее надо восстанавливать.
При дополнительной обработке (восстановлении f n) используют свойство циклостационарности информационного цифрового сигнала.
Циклостационарным называют случайный сигнал, состоящий из последовательности импульсов длительностью, кратной элементарному импульсу длительностью Тс с периодически повторяющимися с периодом Тс средним значением и автокорреляционной функцией. При этом, все статистические и спектральные характеристики этого сигнала неизменны при сдвиге на интервал Δ t, кратный Тс.
Известно, что нелинейное преобразование циклостационарного сигнала приводит к появлению в спектре на выходе в явном виде частот, обратно пропорциональных длительности интервала Δ t. Следовательно, например, после возведения в квадрат информационного сигнала в его спектре в явном виде будут присутствовать тактовые частоты вида R = k / Тс, которые можно использовать для синхронизации по схеме рис.1.2 или рис.1.3.
Реализация схемы оптимального детектора с вариантами тактовой синхронизации открытого типа по циклостационарному информационному цифровому сигналу представлена на рис.1.5.

Рис.1.5. Схема детектора с тактовой синхронизацией открытого типа по информационному цифровому сигналу
Известно также, что при перемножении циклостационарного сигнала на его задержанную копию, в спектре также появляется тактовая частота в явном виде, амплитуда которой максимальна при задержке на Тс / 2 (на рис.1.5 пунктирные линии).
Отметим, что для восстановления тактовой частоты в явном виде возможны и другие нелинейные преобразования, например, ограничение амплитуды.
Пример. Синхронизация по тестовой последовательности.
При синхронизации по известному короткому тестовому информационному сигналу, в котором также отсутствует в явном виде тактовая частота, работа петли ФАПЧ является неустойчивой. Причиной тому является накопление ошибки управления на входе ГУН при следовании подряд нескольких одинаковых информационных символов тестовой последовательности, т.е. при перемножении f Т и ν(t) в схеме рис.1.2. Такое накопление ошибки можно устранить, если исключить из сигнала коррекции частоты ГУН выходные импульсы фазового детектора (ФД), не связанные со знакопеременой (прохождением через нуль фронта) импульсов информационного цифрового сигнала ν(t).
Вариант схемы синхронизации с детектором знакоперемен, называемый схемой с расщепленным стробом, представлен на рис.1.6.
Тс t
fТ
t
Рис.1.6. Схема синхронизации с детектором знакоперемен.
Тактовая частота f Т приемника генерируется в виде двух однополярных стробов, разделенных коротким интервалом Δt. Если в этот интервал попадает фронт импульса информационного сигнала, то результаты перемножения строба на сигнал ν(t) в видеразнополярных импульсов проходят на вход фильтра НЧ (ФНЧ) и вход ГУН. Если результаты перемножения одной полярности (нет знакоперемен), то схема совпадения запрещает прохождение однополярных импульсов на вход ФНЧ и ГУН.
В радиолинии передачи речи допустимая вероятность ошибки из-за неточности тактовой синхронизации не более 10-3, что соответствует среднеквадратическому значению относительной ошибки синхронизации Δ t / Тс не более 10%.