Датчики положения могут быть как дискретного так и непрерывного (аналогового) типа. В качестве датчика положения ротора аналогового типа в системах управления часто используются вращающиеся трансформаторы (ВТ) в режиме амплитудной или фазовой модуляции с последующим преобразованием аналогового сигнала в цифровой.
Датчики дискретного типа формируют сигналы одного уровня возникающие в фиксированных положениях ротора и имеющие длительность, определяемую угловым размером сигнального сектора (расстояние между рисками) и скоростью вращения ротора. Датчики аналогового типа формируют сигналы, изменяющиеся по определённому закону в зависимости от угла поворота ротора. Чувствительный элемент аналогового датчика может формировать непрерывный сигнал с периодом 2π эл. градусов.
В качестве датчиков положения ротора в современных системах чаще всего используются высокоточные оптические энкодеры, обеспечивающие точность определения углового положения на уровне 24-32 значащих разрядов. Ведущие фирмы-производители подобных датчиков оснащают свои изделия специализированными высокоскоростными последовательными интерфейсами. В качестве примера можно привести интерфейс EnDat (фирма Heidenhain) и интерфейс BISS (фирма Renishaw). В сложных крупногабаритных прецизионных системах стандартной практикой является установка нескольких (от двух до четырех) датчиков положения на каждой оси инструмента. Это позволяет учесть механические нежёсткости конструкции, и скомпенсировать геометрические погрешности установки датчиков и других элементов конструкции.
При использовании цифрового датчика положения преобразователь координат выполняется на базе цифрового устройства управления – микроконтроллера.
Преимущество приведения математического описания электропривода с МК к непрерывной модели. При этом МК представляется в виде линейного звена, вносящего эквивалентное фазное запаздывание, зависящее от периода дискретизации по времени. На рисунке 1.13 показано прохождение аналогового сигнала через микроконтроллер (МК).

Рисунок 1.13. Прохождение аналогового сигнала через АЦП
На рисунке 1.13 обозначено:
– гармонический сигнал  , поступающий на вход аналого-цифрового преобразователя (АЦП);
, поступающий на вход аналого-цифрового преобразователя (АЦП);
– сигнал  на выходе цифро-аналогового преобразователя (ЦАП) МК и первая гармоника
на выходе цифро-аналогового преобразователя (ЦАП) МК и первая гармоника  сигнала, формируемого на выходе ЦАП МК;
сигнала, формируемого на выходе ЦАП МК;
–  период дискретизации по времени;
период дискретизации по времени;
–  время чистого запаздывания, вносимого МК.
время чистого запаздывания, вносимого МК.
При прохождении гармонического сигнала через МК, сигнал подвергается дискретизации, период дискретизации не может быть меньше программного цикла  . В течении времени однократного выполнения всех вычислений МК не осуществляет выборку выходного сигнала , поскольку в этот момент не получен результат вычислений, произведённых по результатам предыдущей выборки. В течении промежутка времени, равного периоду , значение цифрового сигнала остаётся постоянным. При восстановлении сигнала модулем АЦП на выходе МК получается кусочно-постоянный сигнал.
. В течении времени однократного выполнения всех вычислений МК не осуществляет выборку выходного сигнала , поскольку в этот момент не получен результат вычислений, произведённых по результатам предыдущей выборки. В течении промежутка времени, равного периоду , значение цифрового сигнала остаётся постоянным. При восстановлении сигнала модулем АЦП на выходе МК получается кусочно-постоянный сигнал.
Из рисунка 1.13 следует, что первая гармоника выходного сигнала отстаёт от входного гармонического сигнала на время , равное половине периода дискретизации . Таким образом, МК можно представить апериодическим запаздыванием с постоянной  , где
, где  период программного цикла. Тогда математическое описание МК примет вид:
период программного цикла. Тогда математическое описание МК примет вид:
 .
.
Силовой полупроводниковый преобразователь может быть представлен апериодическим звеном первого порядка:
 (1.13)
(1.13)
Таким образом, суммарная величина запаздывания равна:
 , а фазовый сдвиг, вносимый запаздыванием равен:
, а фазовый сдвиг, вносимый запаздыванием равен:
 . (1.14)
. (1.14)
Суммарный фазовый сдвиг  в канале ДПР – ПК – АИ приводит к смещению вектора напряжения на статоре относительно оси q в сторону отставания. При этом возрастает продольная составляющая тока якоря и соответственно суммарный магнитный поток. Рост потока вызывает падение скорости. Эти процессы прослеживаются на векторной диаграмме, представленной на рисунке 1.14.
в канале ДПР – ПК – АИ приводит к смещению вектора напряжения на статоре относительно оси q в сторону отставания. При этом возрастает продольная составляющая тока якоря и соответственно суммарный магнитный поток. Рост потока вызывает падение скорости. Эти процессы прослеживаются на векторной диаграмме, представленной на рисунке 1.14.

Рисунок 1.14 – Векторная диаграмма ВД с инерционным каналом ДПР–ПК.
Одноканальная модель ВД, т. е. модель, в которой напряжения  зависят от начальной установки ДПР, представлена на рисунке 1.15, в которой блок VD_ab представляет собой ВД в неподвижной системе координат. Динамические процессы с рассмотренной реализацией ДПР-ПК исследованы на модели при напряжении на обмотках
зависят от начальной установки ДПР, представлена на рисунке 1.15, в которой блок VD_ab представляет собой ВД в неподвижной системе координат. Динамические процессы с рассмотренной реализацией ДПР-ПК исследованы на модели при напряжении на обмотках  , т. к. именно при большом напряжении в наибольшей степени проявляются нелинейные свойства ВД. Переходные процессы в ВД представлены на рисунке 1.16.
, т. к. именно при большом напряжении в наибольшей степени проявляются нелинейные свойства ВД. Переходные процессы в ВД представлены на рисунке 1.16.
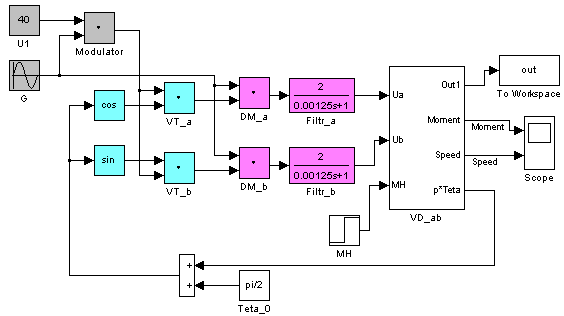
Рисунок 1.15 – Модель одноканальной структуры ВД в неподвижной системе координат.
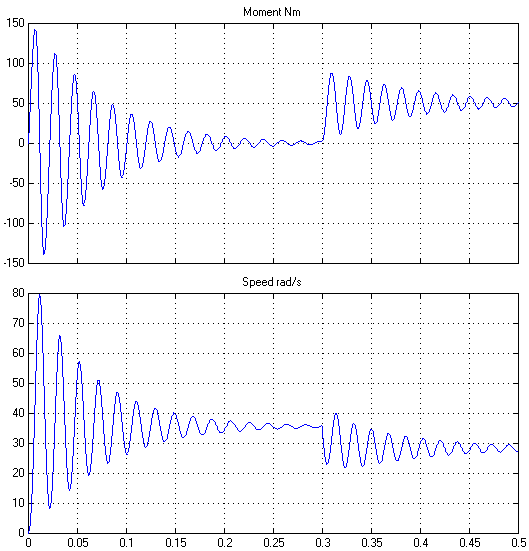
Рисунок 1.16 – Переходные процессы в модели с одноканальной структурой.
Если сравнивать эти процессы с аналогичными (рисунок 1.11) для ВД с безынерционным каналом ДПР-ПК-АИ, то можно заметить, что за счёт увеличения сдвига фазы напряжения U1 и соответственно тока I1 относительно оси q увеличивается поток и снижается скорость вентильного двигателя.
Одноканальная структура ВД с инерционным каналом ДПР – ПК – АИ во вращающейся системе координат представлена на рисунке 1.17.

Рисунок 1.17 – Одноканальная структура ВД во вращающейся системе координат.
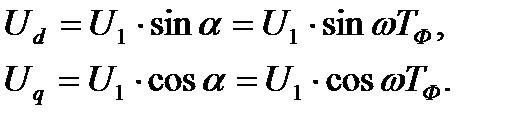
Напряжения в этой структуре определяются из уранений:
 (1.15)
(1.15)
В реверсивных системах датчики положения ротора выполняются так, чтобы  , тогда:
, тогда:
 (1.16)
(1.16)
Одноканальная модель ВД представлена на рисунке 1.18. В блоке Subsystem1 вычисляются по уравнениям 1.16. Переходные процессы в ВД представлены на рисунке 1.19.
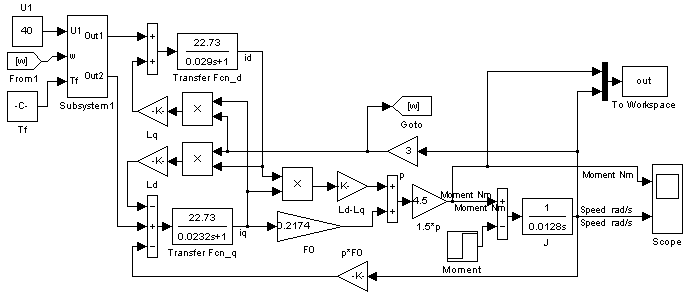
Рисунок 1.18 – Модель одноканальной структуры ВД во вращающейся системе координат.
Рисунок 1.19 – Переходные процессы в одноканальной модели ВД во вращающейся системе координат.
Двух канальная модель ВД представлена на рисунке 1.20. В блоке Subsystem1 вычисляются по уравнениям:
 (1.17)
(1.17)
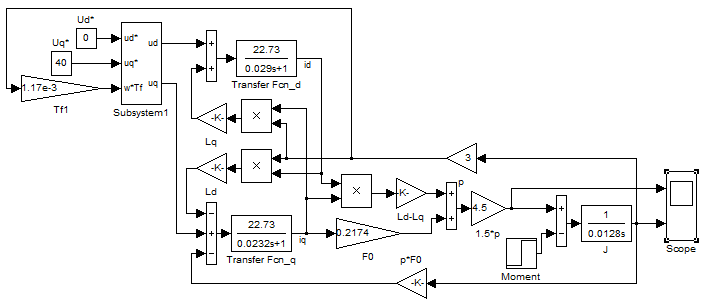
Рисунок 1.20 – Модель двухканальной структуры ВД во вращающейся системе координат.
Переходные процессы по управлению и возмущению представлены на рисунке 1.21.
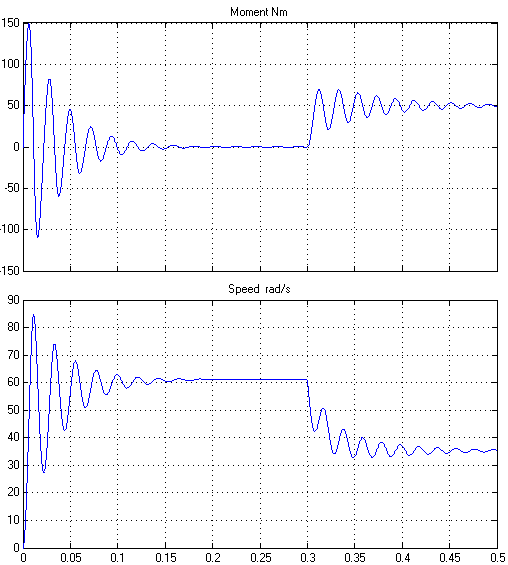
Рисунок 2.21 – Переходные процессы в модели в двухканальной модели во вращающейся системе координат.
Переходные процессы в ВД для одноканальной структуры в неподвижной и во вращающейся системах координат аналогичны.
Таким образом, запаздывание в канале ДПР – ПК – АИ приводит к появлению нелинейности по управлению, т. к. напряжения на обмотках двигателя изменяются с изменением скорости. В некоторых случаях эти нелинейности могут быть скомпенсированы путём введения определённых обратных связей.
СИНТЕЗ СИСТЕМЫ УПРАВЛЕНИЯ





