УДК
Мехатронные системы с вентильным двигателем: учебное пособие / Р.С. Гаврилов; Балт. Гос. Техн. Ун-т. – СПб., 2015. 88 – с.
Пособие содержит описание основных частей мехатронной системы с вентильным двигателем. Представлен математический аппарат для определения и построения механических, электромагнитных и энергетических характеристик вентильного двигателя. Изложены основы по синтезу и расчёту непрерывных и дискретных регуляторов в замкнутых контурах управления приводом на базе вентильного двигателя. Приведено описание комплекса лабораторных работ по исследованию статических и динамических характеристик систем с вентильным двигателем на ЭВМ с помощью учебно-исследовательского пакета программ Matlab-Simylink.
Предназначено для студентов старших курсов, изучающих дисциплины «Моделирование систем управления», «Моделирование процессов и систем», «Моделирование мехатронных и робототехнических систем», «Теория управления».
Рецензент
Утверждено
редакционно-издательским
советом университета
© Р.С. Гаврилов, 2015
© БГТУ, 2015
ВВЕДЕНИЕ
При аналитическом исследовании ВД используется теоретическое положение, разработанное А. А. Булгаковым, заключающееся в том, что электромагнитные, электромеханические и энергетические характеристики электропривода определяются основной (гладкой) составляющей. Однако, пульсации напряжений, токов, моментов, скоростей и мощностей в системе, вызванные переключением силовых полупроводниковых элементов, вызывают искажения формы токов (моментов), появление высших гармонических в токах и напряжениях, дополнительные потери и существенно влияют на ее электромагнитные и энергетические характеристики.
Точное количественное исследование таких систем может быть осуществлено только численными методами, которые базируются на использовании компьютерного моделирования.
Компьютерная модель – это программная реализация математической модели, дополненная различными служебными программами (например, рисующими и изменяющими графические образы во времени).
На исторически ранних этапах компьютерного моделирования программы создавались на языке машинных слов (1100101….). Следующим шагом стал язык Ассемблера. В дальнейшем появились языки программирования "высокого уровня" (Алгол, Бейсик, Фортран, Паскаль, Си и др.). Применявшаяся в те годы технология программирования требовала на создание моделей достаточно много времени. Трудозатраты на создание простой, с современной точки зрения, компьютерной модели оценивалась в 5–6 человеко-месяцев.
На сегодняшний день положение кардинально изменилось. Начиная с 1970 года, было разработано множество объектно-ориентированных программных продуктов, автоматизирующих этап представления математической модели для компьютера. Среди них лидирующее положение для исследования полупроводниковых и электромеханических систем занимает программная среда Matlab–Simulink.
Модельно-ориентированное проектирование позволяет разрабатывать и моделировать конструктивно сложные системы, работающие в различных режимах и условиях, проводить тесты, которые невозможно провести на реальном объекте из-за различных ограничений, в том числе связанных с безопасностью.
ОБЩИЕ ПОЛОЖЕНИЯ
Вентильный двигатель – это устройство, в котором синхронная машина с синусоидальным распределением магнитного поля в зазоре с возбуждением от постоянных магнитов включена в замкнутую систему с использованием датчика положения ротора (ДПР), преобразователя координат (ПК), системы управления (СУ) и силового полупроводникового преобразователя (СПП). Преобразование координат и система управления СПП реализованы в цифровой форме в микроконтроллере (МК). Форма магнитного поля в зазоре обуславливает способ формирования напряжения (тока) на выходе СПП. В ВД на выходе СПП необходимо формировать синусоидальный ток, что достигается за счет синусоидальной широтно-импульсной модуляции (ШИМ). Структурная схема трехфазного вентильного двигателя на основе синхронной машины с возбуждением от постоянных магнитов и явнополюсным ротором представлена на рисунке 1.1. Обмотка статора двигателя питается от СПП, переключение ключей которого выполняется в зависимости от угла поворота ротора двигателя Θ. В преобразователе координат выполняется преобразование сигналов задания напряжения во вращающейся системе координат в трехфазную систему синусоидальных задающих сигналов UA, UВ, UС, частота которых определяется скоростью двигателя.

Рисунок 1.1. Структурная схема ВД
Вентильный электродвигатель
1.2.1 Математическое описание и модель вентильного двигателя в неподвижной системе координат с безынерционным каналом ДПР-ПК
При построении математической модели синхронной машины с синусоидальным распределением магнитного поля в зазоре с возбуждением от постоянных магнитов примем следующие допущения:
– отсутствует насыщение магнитной цепи, потери в стали, эффект вытеснения тока;
– обмотки статора симметричны;
– индуктивность рассеяния не зависит от положения ротора в пространстве.
Обобщённая синхронная машина с синусоидальным распределением магнитного поля в зазоре с возбуждением от постоянных магнитов показана на рисунке 1.4. Она содержит две обмотки на статоре, обозначенные α, β и явнополюсный ротор в виде постоянного магнита, поле которого направлено по оси d.

Рисунок 1.4 – Обобщённая синхронная машина.
Уравнения равновесия ЭДС в обмотках статора и моментов на валу записываются в виде:
 (1.1)
(1.1)
В уравнениях (1.1)  ,
,  ,
,  ,
,  – проекции мгновенных значений напряжений и токов статора на оси α и β, R – сопротивление статорной обмотки,
– проекции мгновенных значений напряжений и токов статора на оси α и β, R – сопротивление статорной обмотки,  – механическая угловая скорость, электромагнитный момент, момент нагрузки и механический угол поворота вала, J – момент инерции ротора.
– механическая угловая скорость, электромагнитный момент, момент нагрузки и механический угол поворота вала, J – момент инерции ротора.
В уравнениях (1.1) потокосцепления по неподвижным осям α, β находятся из выражений:
 , (1.2)
, (1.2)
где  – магнитный поток в воздушном зазоре между ротором и статором, создаваемый постоянным магнитом ротора на пару полюсов.
– магнитный поток в воздушном зазоре между ротором и статором, создаваемый постоянным магнитом ротора на пару полюсов.
Если пренебречь насыщением стали, то выражения для собственных индуктивностей и взаимной индуктивности имеют вид:
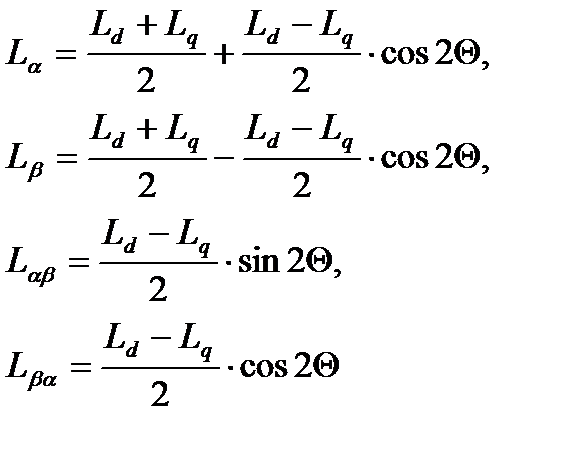 (1.3)
(1.3)
где  – индуктивность обмотки статора по продольной и поперечной осям,
– индуктивность обмотки статора по продольной и поперечной осям,  – угол поворота ротора относительно статора.
– угол поворота ротора относительно статора.
С учётом уравнений (1.1), (1.2) и (1.3) полное описание синхронной машины с постоянными магнитами в неподвижной системе координат приведено в системе уравнений (1.4):
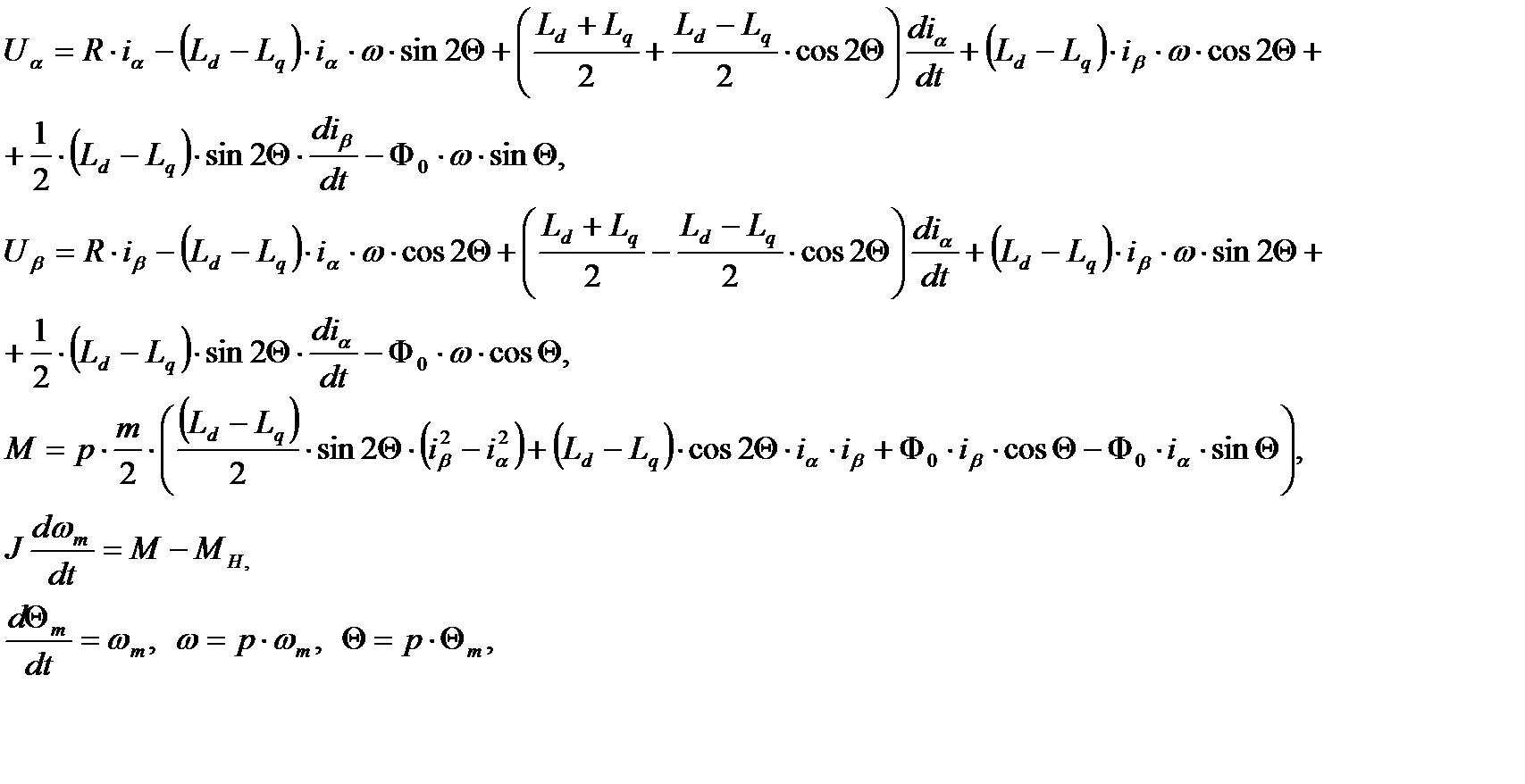 где
где  – число пар полюсов,
– число пар полюсов,  – число фаз в машине.
– число фаз в машине.
Уравнения (1.4) описывают синхронную машину с синусоидальным распределением магнитного поля в зазоре с возбуждением от постоянных магнитов. Для того чтобы из этих уравнений получить уравнения вентильного двигателя, необходимо связать напряжения на статоре ВД с углом поворота ротора, который определяется сигналом с датчика положения ротора.
В этом случае напряжения  ,
,  должны зависеть от начальной установки датчика положения ротора и от угла поворота ротора и определяться выражениями:
должны зависеть от начальной установки датчика положения ротора и от угла поворота ротора и определяться выражениями:
 (1.5)
(1.5)
где  – амплитуда первой гармоники напряжения на выходе инвертора.
– амплитуда первой гармоники напряжения на выходе инвертора.
В реверсивных системах – а мехатронные системы, как правило, реверсивные – датчик положения ротора выставляется так, чтобы  .
.
Структурная модель ВД в неподвижной системе координат, собранная в среде Matlab Simulink, представлена на рисунке 1.5.
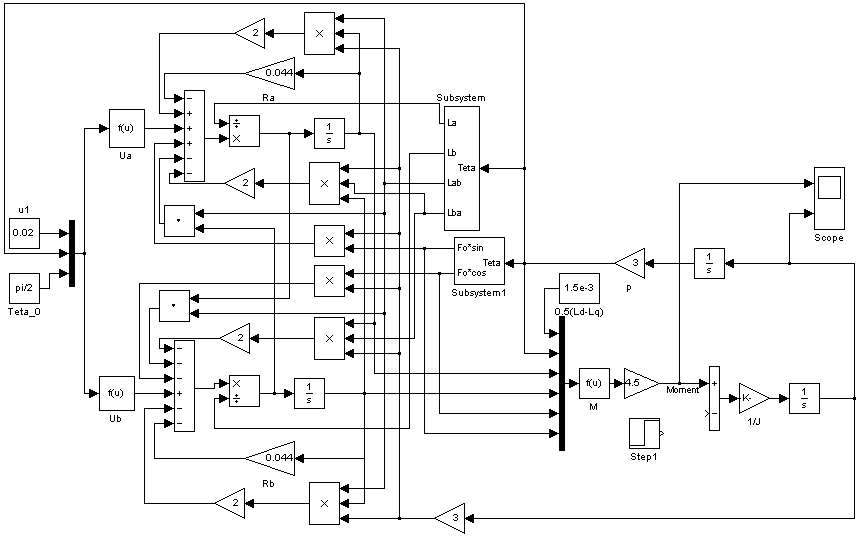
Рисунок 1.5 – Структурная модель ВД в неподвижной системе координат.
Напряжения , вычисляются по уравнениям:
 (1.6)
(1.6)
где  – коэффициент усиления силового полупроводникового преобразователя (автономного инвертора).
– коэффициент усиления силового полупроводникового преобразователя (автономного инвертора).
Модели блоков Subsytem и Subsytem1 представлены на рисунках 1.6 и 1.7 соответственно.
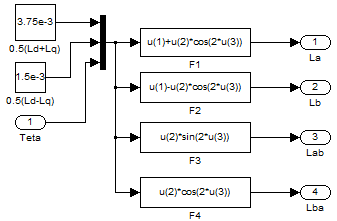
Рисунок 1.6 – Модель блока Subsytem.
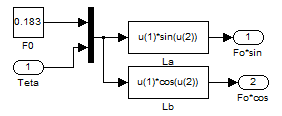
Рисунок 1.7 – Модель блока Subsytem1.
В блоке Fcn (М) реализовано уравнение 3 системы 1.4.
Математическое описание ВД в неподвижной системе координат достаточно сложное, его приходится применять при импульсном управлении ВД, когда нельзя использовать уравнения (1.5) для напряжения на фазовых обмотках двигателя.
В случае питания обмоток статора синусоидальным или квазисинусоидальным (ШИМ по синусоидальному закону) напряжением следует использовать вращающуюся систему координат для упрощения математического описания ВД и упрощения синтеза системы регулирования, т.к. последняя строится во вращающейся системе координат.
1.2.2 Математическое описание и модель вентильного двигателя во вращающейся системе координат с безынерционным каналом ДПР-ПК
Для упрощения математического описания вентильной машины используется система координат d-q, жестко связанная с ротором при этом ось d совмещается с направлением магнитного поля ротора.
В этом случае уравнения, которыми описываются электромагнитные и электромеханические процессы в магнитоэлектрическом вентильном двигателе имеют вид:
 (1.7)
(1.7)
В уравнениях (1.7)  – проекции напряжений и токов статора на оси d и q,
– проекции напряжений и токов статора на оси d и q,  - проекция потока ротора на ось d,
- проекция потока ротора на ось d,  – постоянные времени и индуктивность обмотки статора по продольной и поперечной осям,
– постоянные времени и индуктивность обмотки статора по продольной и поперечной осям,  – сопротивления статорной обмотки,
– сопротивления статорной обмотки,  – механическая угловая скорость, электромагнитный момент, момент нагрузки и механический угол поворота вала,
– механическая угловая скорость, электромагнитный момент, момент нагрузки и механический угол поворота вала,  – момент инерции ротора вместе с приведенным моментом инерции рабочего механизма, p – число пар полюсов, m – число фаз обмотки статора.
– момент инерции ротора вместе с приведенным моментом инерции рабочего механизма, p – число пар полюсов, m – число фаз обмотки статора.
Структурная схема ВД, составленная по уравнениям (1.7), представлена на рисунке 1.8.
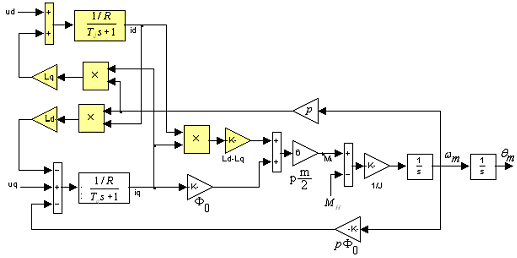
Рисунок 1.8 – Структурная схема ВД во вращающейся системе координат. На рисунке обозначено:  ,
,  ,
,  .
.
Напряжения  зависят от начальной установки датчика положения ротора и определяются выражениями:
зависят от начальной установки датчика положения ротора и определяются выражениями:
 , (1.8)
, (1.8)
где  – амплитуда непрерывной составляющей (первой гармоники) переменного фазного напряжения, которое может быть сформировано на выходе СПП. При работе ключей СПП в режиме синусоидальной ШИМ амплитуда непрерывной составляющей фазного напряжения на выходе равна:
– амплитуда непрерывной составляющей (первой гармоники) переменного фазного напряжения, которое может быть сформировано на выходе СПП. При работе ключей СПП в режиме синусоидальной ШИМ амплитуда непрерывной составляющей фазного напряжения на выходе равна:
 где
где  – коэффициент модуляции ШИМ.
– коэффициент модуляции ШИМ.
В реверсивных системах датчик положения ротора выставляется так, чтобы  , тогда
, тогда  .
.
В установившемся режиме момент и ток потребления двигателя определяются из системы уравнений (1.7) и имеют вид:
 (1.9)
(1.9)
 (1.10)
(1.10)
Токи продольной и поперечной составляющих в установившемся режиме определяются из выражений:
 ,
,  (1.11)
(1.11)
Скорость холостого хода двигателя определяется из второго уравнения системы (1.7):  .
.
Если  , то двигательный режим работы двигателя, если
, то двигательный режим работы двигателя, если  , то генераторный режим работы двигателя.
, то генераторный режим работы двигателя.
Активная и реактивная мощности, потребляемые двигателем, определяются из соотношений:
 (1.12)
(1.12)
1.2.3 Анализ влияния перекрестных связей в ВД
Из структурной схемы ВД (рис. 1.8) видно, что ВД отличается от двигателя постоянного тока наличием перекрестных связей по переменным состояния  в уравнениях равновесия ЭДС на обмотках и добавочным слагаемым электромагнитного момента в уравнении равновесия моментов на валу ВД, обусловленного асимметрией магнитной системы (
в уравнениях равновесия ЭДС на обмотках и добавочным слагаемым электромагнитного момента в уравнении равновесия моментов на валу ВД, обусловленного асимметрией магнитной системы ( ).
).
Количественное влияние перекрестных связей на динамические характеристики вентильного двигателя можно исследовать на модели, представленной на рисунке 1.9.
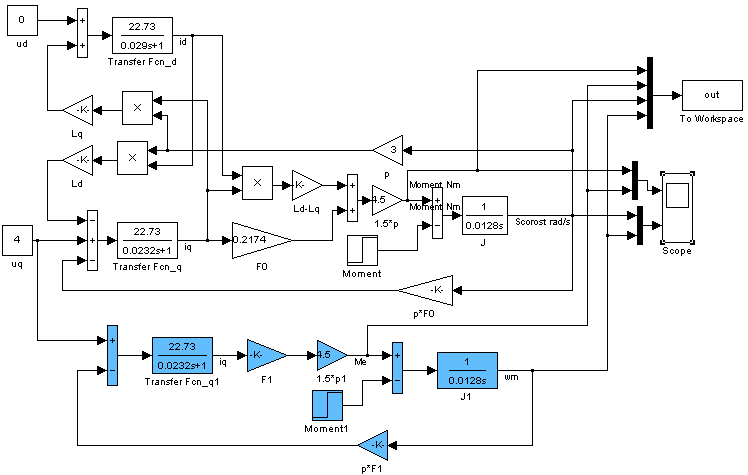
Рисунок 1.9 – Модели ВД.
На рисунке 2.4 представлены две модели:
а) Модель ВД с перекрестными связями (верхняя модель);
б) Модель ВД без перекрестных связей (нижняя модель), которая в точности повторяет модель ДПТ.
Рассмотрим влияние перекрёстных связей на динамические характеристики для двигателя типа СFM112L фирмы SEWEurodrive. В таблице 1.1 приведены параметры указанного двигателя.
Таблица 1.1 – Параметры ВД СFM112L.
| Наименование
| Размерность
| Величина
|
| Номинальный момент
| N·m
| 45
|
| Напряжение питания
| V
| 400
|
| Номинальный ток
| A
| 46
|
Индуктивность статора 
| H
| 0.0019
|
| Сопротивление якоря
| Ohm
| 0.044
|
Момент инерции ротора 
| kg·m²
| 0.0128
|
| Коэффициент противо-ЭДС
| В/1000об/мин
| 60
|
| Число пар полюсов, р
| –
| 3
|
Проекции индуктивностей  и
и  на оси d и q рассчитываются из следующих соотношений:
на оси d и q рассчитываются из следующих соотношений:  .
.
Переходные процессы по управлению и возмущению для двух значений напряжения на ВД 4 В и 40 В представлены рисунках 1.10 и 1.11.

Рисунок 1.10 – Переходный процесс по управлению и возмущению при задании напряжения на ВД 4 В.
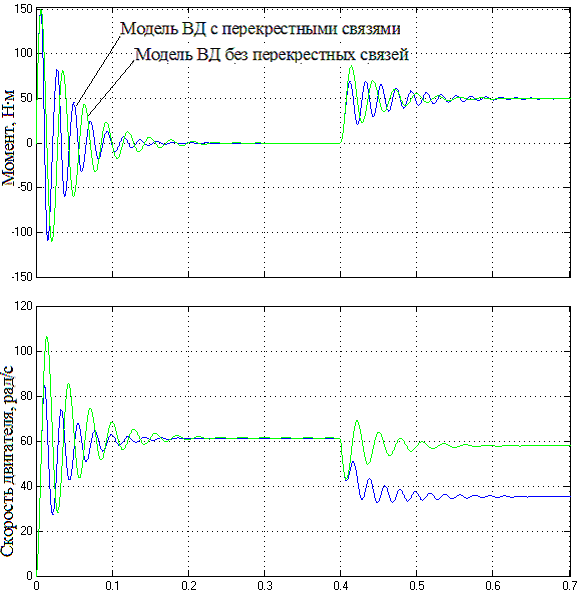
Рисунок 1.11 – Переходный процесс по управлению и возмущению при значений напряжения на ВД 40 В
Влияние перекрестных связей при больших сигналах управления проявляется в "затягивании" переходного процесса по скорости при скачке управляющего сигнала и в значительном провале скорости при скачке возмущающего сигнала.. Перекрестные связи при нулевом значении напряжения  вызывают появление тока продольной составляющей
вызывают появление тока продольной составляющей  . Ток продольной составляющей влияет на суммарный магнитный поток, что в наибольшей степени сказывается в реакции на скачок возмущающего сигнала.
. Ток продольной составляющей влияет на суммарный магнитный поток, что в наибольшей степени сказывается в реакции на скачок возмущающего сигнала.
Качественно это явление легко наблюдать на векторной диаграмме ВД, представленной на рисунке 1.12.

Рисунок 1.12 – Векторная диаграмма ВД.
Возрастание момента приводит к увеличению тока  , что сказывается на увеличении суммарного потока в машине и, соответственно, на уменьшении скорости.
, что сказывается на увеличении суммарного потока в машине и, соответственно, на уменьшении скорости.
Следует заметить, что индуктивность статорных обмоток вентильных двигателей, как правило, достаточно мала, поэтому и влияние продольной составляющей на поток так же незначительно. Исключить влияние перекрестных связей, а равно и влияние противо-ЭДС (составляющая  , рисунок 1.12), можно путем построения замкнутых токовых контуров. Таким образом, одним из вариантов построения системы управления двигателем и приводом на его основе базируется на методе подчинённых контуров.
, рисунок 1.12), можно путем построения замкнутых токовых контуров. Таким образом, одним из вариантов построения системы управления двигателем и приводом на его основе базируется на методе подчинённых контуров.
СИНТЕЗ СИСТЕМЫ УПРАВЛЕНИЯ
Цель работы.
Исследование динамических характеристик вентильного двигателя, оценка влияния перекрёстных связей на динамические характеристики двигателя. Аналитическое определение параметров регуляторов при настройке контуров системы на модульный (технический) оптимум. Определение динамических характеристик замкнутой системы при различных параметрах регулятора.
Содержание отчета.
1. Теоретические основы для выполнения лабораторной работы.
2. Цель работы.
3. Модели и параметры объекта и регулятора.
4. Результаты моделирования.
5. Механические и электромагнитные характеристики.
6. Выводы по работе.
Цель работы.
Определение основных характеристик вентильного двигателя. Исследование влияния запаздывания в канале ДПР-ПК-АИ на характеристики ВД по модели, построенной с помощью элементов библиотеки SymPowerSystems.
Аналитическое определение параметров регуляторов при настройке контуров системы на модульный (технический) оптимум и на периодический процесс.
Определение динамических характеристик замкнутой системы при различных параметрах регулятора.
Содержание отчета.
1. Теоретические основы для выполнения лабораторной работы.
2. Цель работы.
3. Модели и параметры объекта и регулятора.
4. Результаты моделирования.
5. Сравнение результатов моделирования структурных и виртуальных моделей.
6. Выводы по работе.
Цель работы.
Определение основных характеристик объекта управления, как многомассовой структуры с упругими связями между массами. Аналитическое определение параметров регуляторов при настройке контуров системы на модульный (технический) оптимум и на периодический процесс.
Определение динамических характеристик замкнутой системы при различных параметрах регулятора.
Синтез системы управления
Технические требования к системе управления приведены в таблице 6.
Таблица 6 — Технические требования
| Наименование параметра
| Значение параметра
|
| Вариант 1
| Вариант 2
| Вариант 3
| Вариант 4
| Вариант 5
|
| Максимальная скорость, o/c
Максимальное ускорение, o/c2
Максимальное ускорение при переустановке оси, o/c2
Мин. скорость движения, …"/c
Максимальные значения статической и динамической ошибок, …", не более
| 12
3
6
10
30
| 3
1
2
10
30
| 7
1
2
10
30
| 20
10
20
2
30
| 20
10
20
2
30
|
Основной задачей системы управления является управление исполнительным органом с обеспечением требуемой статической и динамической точности во всём диапазоне регулирования скорости в режимах слежения, программного наведения, переустановки осей и движения с постоянной скоростью, а так же обеспечение плавного движения на малых скоростях.
Рассмотрим вопрос синтеза скоростного регулятора в системе с трехфазным автономным инвертором и релейным регулятором в контуре тока. В этом случае контур тока можно считать безинерционным, а инвертор - источником тока. Регулятор скорости, реализующий технический оптимум в скоростной системе, синтезируем в соответствии с методикой, описанной в предыдущей лабораторной работе.
При использовании релейного регулятора тока синтез регулятора скорости не зависит от места включения регулятора тока. После замыкания обратной связи по току, контур тока можно считать безынерционным, а силовой регулятор – источником тока. Тогда передаточная функция контура тока будет равна:
Тогда разомкнутый контур скорости описывается интегрирующим звеном с передаточной функцией:

где 
В этом случае рекомендуется использовать пропорциональный регулятор скорости:
 , причём
, причём
 , где
, где  .
.
Из последнего соотношения следует, что постоянная времени  может принять любое малое наперёд заданное значение. После замыкания контура его передаточная функция определится из выражения:
может принять любое малое наперёд заданное значение. После замыкания контура его передаточная функция определится из выражения:
Для обеспечения заданного диапазона регулирования скорости необходимо, чтобы контур скорости имел частоту среза равную:
 ,
,
где  определяет из следующего соотношения:
определяет из следующего соотношения:


Зададимся показателем колебательности М = 1.1, тогда:


Модель скоростной системы приведена на рис. 12. Переходные процессы приведены на рис. 13.

Рис. 12 – Модель скоростной системы.
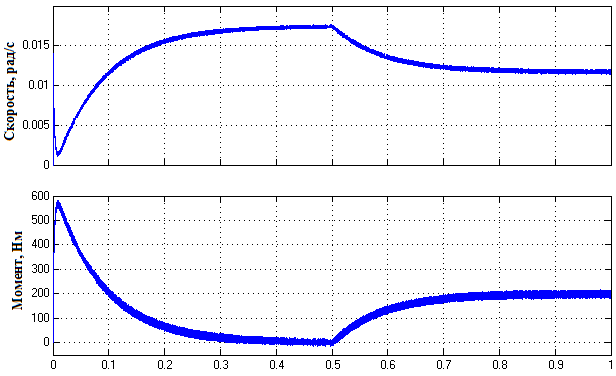
Рис. 13 – Переходные процессы в скоростной системе.
В момент включения двигателя происходит мгновенное нарастание тока до максимального значения (токовый удар), что приводит к закручиванию металлоконструкции объекта управления. Для избегания подобных процессов в регуляторе скорости необходимо ограничить величину максимального нарастания тока с помощью элемента Rate Limiter Dynamic из библиотеки Simulink. Задать максимальную величину нарастания тока на уровне ±200 А.
Разомкнутый контур положения описывается передаточной функцией вида  Тогда регулятор должен быть пропорционально-интегральным:
Тогда регулятор должен быть пропорционально-интегральным:

Тогда  или после охвата обратной связью получим:
или после охвата обратной связью получим:  .
.
Для обеспечения заданного диапазона регулирования положения необходимо, чтобы контур положения имел частоту среза равную:
,
где определяет из следующего соотношения:
Зададимся показателем колебательности М = 1.1, тогда:
На выходе регулятора положения введено ограничение максимальной скорости привода. Переходные процессы в контуре положения при управлении в «малом» и «большом» представлены на рис. 14 и 15.

Рис. 14 – Переходный процесс в контуре положения при управлении в «малом».

Рис. 15 – Переходный процесс в контуре положения при управлении в «малом».
При текущей настройке регулятора в контуре положения система устойчива в «малом» и неустойчива в «большом». Проведённые выше исследования динамических характеристик привода, позволяют сделать заключение, что для обеспечения стабильной работы электропривода во всём диапазоне регулирования скорости и положения необходимо введение дополнительных корректирующих элементов.
Согласно теории Емельянова С. В. в подобных системах для обеспечения устойчивой работы системы управления в «большом» и «малом» необходимо применение регулятора положения с переменным коэффициентом усиления. Это позволяет обеспечить требуемое качество регулирования за счёт подбора коэффициента усиления в регуляторе главной обратной связи и выбора прямой переключения. Линии переключения пропорционального и интегрального коэффициентов регулятора представлены на рисунке 16.
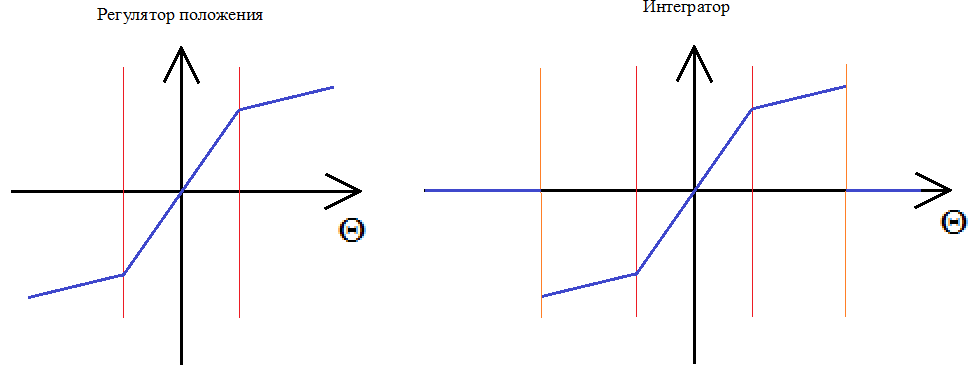
Рис. 16 – Линии переключения.
Модель регулятора положения приведена на рисунке 17.
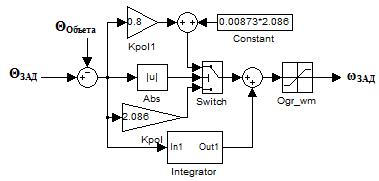
Рис. 17 – Модель регулятора положения.
Элемент Switch переключает структуру регулятора с режима управления «большое» на «малое» тогда, когда модуль ошибки системы становится меньше 30'=0.00873 рад. При управлении в «большом» регулятор пропорциональный. Коэффициент усиления при управлении в «большом» должен быть в 2÷4 раза меньше расчётной величины. При управлении в «малом» регулятор пропорционально-интегральный. Коэффициент усиления интегратора изменятся в зависимости от величины ошибки. Модель интегратора приведена на рисунке 18.
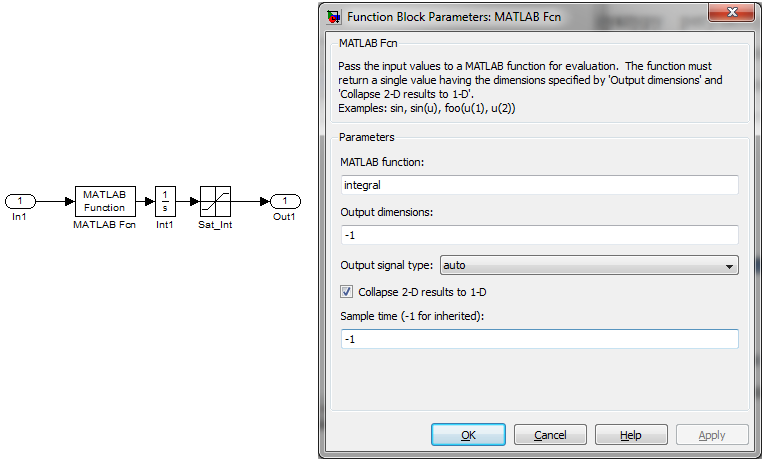
Рис. 18 – Модель интегратора.
Блок MATLAB Fcn передаёт данные в рабочее поле MATLAB, где производятся необходимые вычисления, и возвращает результаты в Simulink. Таким образом, может быть реализован алгоритм управления любой сложности. Листинг программы для расчёта коэффициента интегратора имеет вид:
function y=integral(tetta)
if abs(tetta)>0.000582
y=0;
elseif abs(tetta)<1.454e-4
y=10.43*tetta;
else
y=2*tetta;
end
Модель замкнутой по положению системы представлена на рисунке 20.
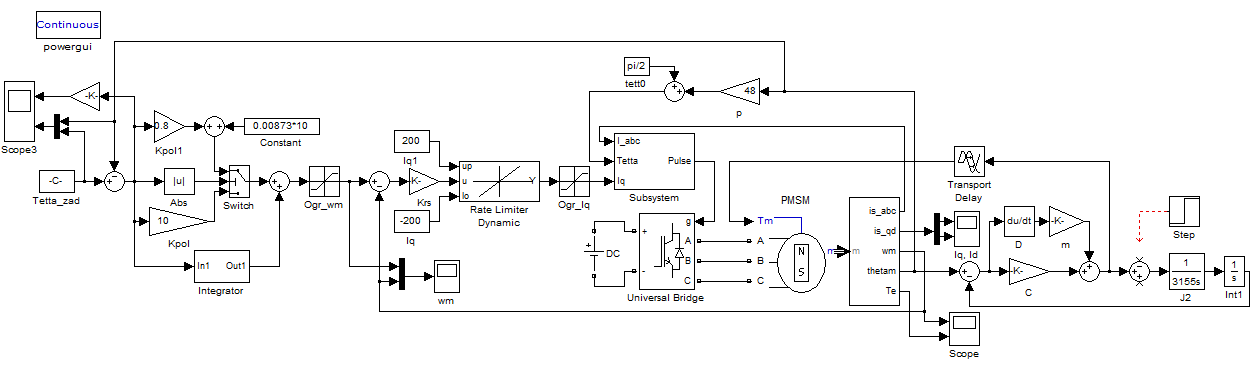
Рис. 19 – Модель замкнутой по положению системы.
Переходные процессы при управлении в «малом» и «большом» приведены на рисунках 20 и 21.
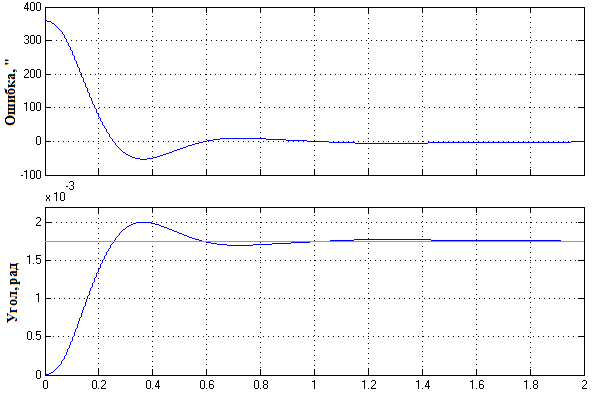
Рис. 20 – Переходные процессы в «малом».
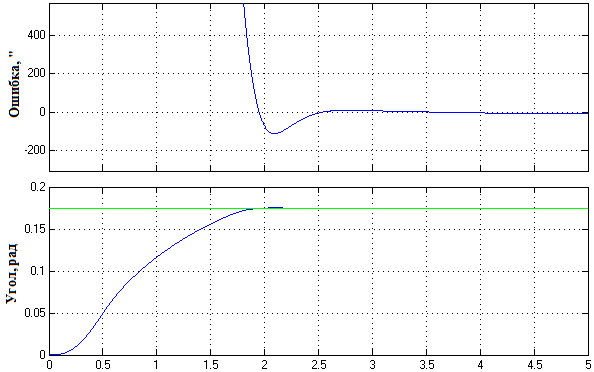
Рис. 21 – Переходные процессы в «большом».
Содержание отчета.
1. Теоретические основы для выполнения лабораторной работы.
2. Цель работы.
3. Модели и параметры объекта и регулятора.
4. Результаты моделирования.
5. Выводы по работе.
ЗАКЛЮЧЕНИЕ
В пособии представлены аналитические уравнения для расчёта основных характеристик вентильного электропривода с замкнутой системой управления. Характеристики, рассчитанные по этим уравнениям, позволяют провести сравнение и определить структуры системы управления, обеспечивающие оптимальные энергетические свойства системы. Представлены модели вентильного двигателя в программной среде Matlab-Simulink.
Изложены основные принципы синтеза системы управления приводом с вентильным двигателем методом подчинённых контуров.
Описан комплекс лабораторных работ, позволяющих студенту получить основные навыки моделирования, исследования и обработки результатов моделирования мехатронных систем с вентильным двигателем.
Библиографический список
1. Борцов Ю.А., Соколовский Г. Г. Автоматизированный электропривод с упругими связями [текст]. Санкт - Петербург, «Энергоатомиздат», 1992.
2. Виноградов А.Б. Векторное управление приводами переменного тока [текст]. / ГОУВПО «Ивановский государственный энергетический университет имени В.И. Ленина».⎯ Иваново, 2008.⎯ 298 с.
3. Герман-Галкин С.Г. MATLAB & SIMULINK. Проектирование мехатронных систем на ПК [текст]: Учебное пособие для вузов. – Санкт-Петербург. Корона-Век. 2008 г.
4. Зиновьев Г.С.: Основы силовой электроники, Ч.2 [текст]. – Новосибирск, 2000 г.
5. Овчинников И.Е. Вентильные электрические двигатели и привод на их основе [текст]. Санкт–Петербург, КОРОНА–Век, 2006.
6. Соколовский Г.Г. Электроприводы переменного тока с частотным регулированием. Учебник для студ. вузов / Г. Г. Соколовский – М.: Издательский центр «Академия», 2006, 272 с.
7. Черных И.В. SIMULINK среда создания инженерных приложений [текст]. Москва. «Диалог-МИФИ», 2004, 491 с илл.
ОГЛАВЛЕНИЕ
ВВЕДЕНИЕ. 3
1 ОБЩИЕ ПОЛОЖЕНИЯ.. 5
1.1 Силовой полупроводниковый преобразователь. 6
1.2 Вентильный электродвигатель. 10
1.2.1 Математическое описание и модель вентильного двигателя в неподвижной системе координат с безынерционным каналом ДПР-ПК.. 10
1.2.2 Математическое описание и модель вентильного двигателя во вращающейся системе координат с безынерционным каналом ДПР-ПК.. 15
1.2.3 Анализ влияния перекрестных связей в ВД. 17
2. СИНТЕЗ СИСТЕМЫ УПРАВЛЕНИЯ.. 31
2.1 Синтез непрерывных регуляторов в подчиненных структурах динамических систем 31
2.2 Синтез непрерывных регуляторов в мехатронной системе с ВД.. 36
2.3 Синтез цифровых регуляторов для динамических систем. 41
Лабораторная работа №1. Исследование вентильного двигателя по структурной модели 48
Лабораторная работа №2. Расчет и проектирование двухконтурной виртуальной скоростной системы с вентильным двигателем. 59
Лабораторная работа №3. Расчет и проектирование трёхконтурной мехатронной системы с вентильным двигателем. 70
ЗАКЛЮЧЕНИЕ. 89
Библиографический список. 90
УДК
Мехатронные системы с вентильным двигателем: учебное пособие / Р.С. Гаврилов; Балт. Гос. Техн. Ун-т. – СПб., 2015. 88 – с.
Пособие содержит описание основных частей мехатронной системы с вентильным двигателем. Представлен математический аппарат для определения и построения механических, электромагнитных и энергетических характеристик вентильного двигателя. Изложены основы по синтезу и расчёту непрерывных и дискретных регуляторов в замкнутых контурах управления приводом на базе вентильного двигателя. Приведено описание комплекса лабораторных работ по исследованию статических и динамических характеристик систем с вентильным двигателем на ЭВМ с помощью учебно-исследовательского пакета программ Matlab-Simylink.
Предназначено для студентов старших курсов, изучающих дисциплины «Моделирование систем управления», «Моделирование процессов и систем», «Моделирование мехатронных и робототехнических систем», «Теория управления».
Рецензент
Утверждено
редакционно-издательским
советом университета
© Р.С. Гаврилов, 2015
© БГТУ, 2015
ВВЕДЕНИЕ
При аналитическом исследовании ВД используется теоретическое положение, разработанное А. А. Булгаковым, заключающееся в том, что электромагнитные, электромеханические и энергетические характеристики электропривода определяются основной (гладкой) составляющей. Однако, пульсации напряжений, токов, моментов, скоростей и мощностей в системе, вызванные переключением силовых полупроводниковых элементов, вызывают искажения формы токов (моментов), появление высших гармонических в токах и напряжениях, дополнительные потери и существенно влияют на ее электромагнитные и энергетические характеристики.
Точное количественное исследование таких систем может быть осуществлено только численными методами, которые базируются на использовании компьютерного моделирования.
Компьютерная модель – это программная реализация математической модели, дополненная различными служебными программами (например, рисующими и изменяющими графические образы во времени).
На исторически ранних этапах компьютерного моделирования программы создавались на языке машинных слов (1100101….). Следующим шагом стал язык Ассемблера. В дальнейшем появились языки программирования "высокого уровня" (Алгол, Бейсик, Фортран, Паскаль, Си и др.). Применявшаяся в те годы технология программирования требовала на создание моделей достаточно много времени. Трудозатраты на создание простой, с современной точки зрения, компьютерной модели оценивалась в 5–6 человеко-месяцев.
На сегодняшний день положение кардинально изменилось. Начиная с 1970 года, было разработано множество объектно-ориентированных программных продуктов, автоматизирующих этап представления математической модели для компьютера. Среди них лидирующее положение для исследования полупроводниковых и электромеханических систем занимает программная среда Matlab–Simulink.
Модельно-ориентированное проектирование позволяет разрабатывать и моделировать конструктивно сложные системы, работающие в различных режимах и условиях, проводить тесты, которые невозможно провести на реальном объекте из-за различных ограничений, в том числе связанных с безопасностью.
ОБЩИЕ ПОЛОЖЕНИЯ
Вентильный двигатель – это устройство, в котором синхронная машина с синусоидальным распределением магнитного поля в зазоре с возбуждением от постоянных магнитов включена в замкнутую систему с использованием датчика положения ротора (ДПР), преобразователя координат (ПК), системы управления (СУ) и силового полупроводникового преобразователя (СПП). Преобразование координат и система управления СПП реализованы в цифровой форме в микроконтроллере (МК). Форма магнитного поля в зазоре обуславливает способ формирования напряжения (тока) на выходе СПП. В ВД на выходе СПП необходимо формировать синусоидальный ток, что достигается за счет синусоидальной широтно-импульсной модуляции (ШИМ). Структурная схема трехфазного вентильного двигателя на основе синхронной машины с возбуждением от постоянных магнитов и явнополюсным ротором представлена на рисунке 1.1. Обмотка статора двигателя питается от СПП, переключение ключей которого выполняется в зависимости от угла поворота ротора двигателя Θ. В преобразователе координат выполняется преобразование сигналов задания напряжения во вращающейся системе координат в трехфазную систему синусоидальных задающих сигналов UA, UВ, UС, частота которых определяется скоростью двигателя.
Рисунок 1.1. Структурная схема ВД
Силовой полупроводниковый преобразователь
|
|
|






