

Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...

Состав сооружений: решетки и песколовки: Решетки – это первое устройство в схеме очистных сооружений. Они представляют...
Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...
Состав сооружений: решетки и песколовки: Решетки – это первое устройство в схеме очистных сооружений. Они представляют...
Топ:
Теоретическая значимость работы: Описание теоретической значимости (ценности) результатов исследования должно присутствовать во введении...
Оснащения врачебно-сестринской бригады.
Когда производится ограждение поезда, остановившегося на перегоне: Во всех случаях немедленно должно быть ограждено место препятствия для движения поездов на смежном пути двухпутного...
Интересное:
Что нужно делать при лейкемии: Прежде всего, необходимо выяснить, не страдаете ли вы каким-либо душевным недугом...
Инженерная защита территорий, зданий и сооружений от опасных геологических процессов: Изучение оползневых явлений, оценка устойчивости склонов и проектирование противооползневых сооружений — актуальнейшие задачи, стоящие перед отечественными...
Искусственное повышение поверхности территории: Варианты искусственного повышения поверхности территории необходимо выбирать на основе анализа следующих характеристик защищаемой территории...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
Определение параметров цифрового регулятора осуществляется путем пересчета параметров синтезированного непрерывного регулятора. Замена непрерывного регулятора эквивалентным цифровым называется переоборудованием. Этот термин в наибольшей степени отражает суть осуществляемых преобразований в синтезируемой мехатронной системе.

Рис. 3.3 – Переход от непрерывной модели к дискретной.
Замкнутая система с непрерывным объектом управления  и синтезированным непрерывным регулятором с передаточной функцией
и синтезированным непрерывным регулятором с передаточной функцией  (рис. 3.3,а) переоборудуется к системе с цифровым регулятором
(рис. 3.3,а) переоборудуется к системе с цифровым регулятором  и фиксатором вычисленных значений с передаточной функцией
и фиксатором вычисленных значений с передаточной функцией  .
.
Переоборудование базируется на представлении интеграла суммой. Эта сумма может быть вычислена тремя методами. Рассмотрим методы численного интегрирования, которые использованы в среде Matlab-Simulink.
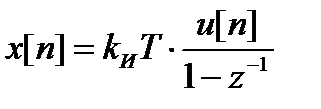
Прямой метод Эйлера.
Прямой метод Эйлера представлен на рис. 2.4. Значение выходного сигнала в момент t= nT здесь находится из выражения:
 (2.5)
(2.5)
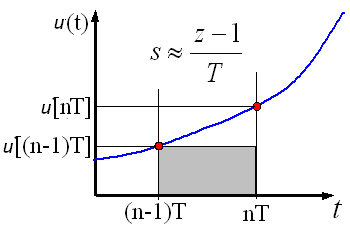
Рис. 2.4 – Прямой метод Эйлера.
При подстановке оператора запаздывания в выражение (2.5), получим:

Сигнал на выходе может быть представлен в виде:
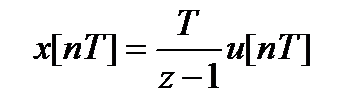 . (2.6)
. (2.6)
Т.о. при использовании прямого метода Эйлера осуществляется замена переменной:
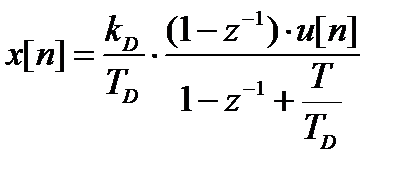
Обратный метод Эйлера
Рассмотрим другой пример, когда аппроксимирующая функция характеризуется "перебором" значений, как это показано на рис. 2.5.
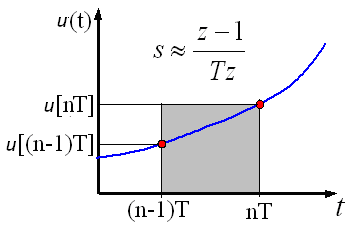
Рис. 2.5 – Обратный метод Эйлера.
Значение выходного сигнала в момент t= nT здесь находится из выражения:

При подстановке оператора запаздывания получим:
|
|
 .
.
Сигнал на выходе может быть представлен в виде:
 . (2.7)
. (2.7)
Т.о. при использовании обратного метода Эйлера осуществляется замена переменной:
 .
.
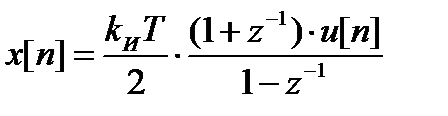
Метод трапеций
В пакете Simulink используется еще одна (трапецеидальная) аппроксимирующая функция (метод Тастина) (рис. 2.6).
Значение выходного сигнала в момент t=nT здесь находится из выражения:
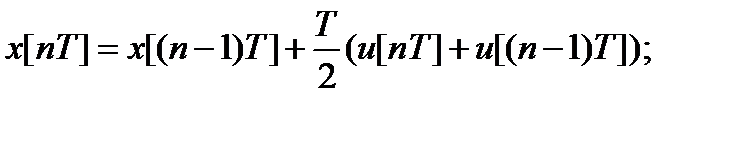
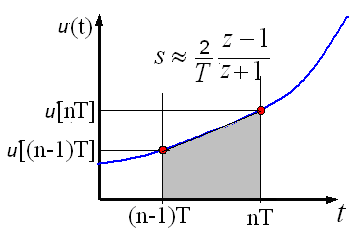
Рис. 2.6 – Метод трапеции.
Сигнал на выходе может быть представлен в виде:

В этом случае аналогом оператора интегрирования  является оператор
является оператор  .
.
Таким образом, ту роль, которую в непрерывных системах играет оператор интегрирования , в дискретных системах играет оператор  , либо
, либо  , либо
, либо  в зависимости от выбора способа численного интегрирования.
в зависимости от выбора способа численного интегрирования.
Если известна операторная передаточная функция непрерывного регулятора, то, используя различные методы численного интегрирования, можно определить передаточную функцию цифрового регулятора.
Заметим, что последняя зависит не только от способа численного интегрирования, но и от значения периода дискретизации Т.
В дальнейшем переоборудование непрерывного регулятора будем рассматривать на примере обобщенного ПИД регулятора с реальным дифференцирующим звеном, передаточная функция которого имеет вид  , при этом для дифференцирующего звена должно выполняться неравенство
, при этом для дифференцирующего звена должно выполняться неравенство  .
.
При переоборудовании используется несколько методов представления операторной функции.
1. Метод параллельного программирования.
При использовании метода параллельного программирования каждое отдельное слагаемое в операторной функции заменяется ее дискретным аналогом с их последующим параллельным суммированием. Эти преобразования помещены в таблицу 2.1
Таблица 2.1
| КП | 
| 
| |
| Прямой метод Эйлера |

| 
| 
|
| Обратный метод Эйлера |
| 
| 
|
| Метод трапеций |
| 
| 
|
На рис. 2.7 представлена модель И-регулятора, реализованная тремя метдами в соответствии с уравнениями табл. 3.1 для Ки=2, Т=0.5.
|
|
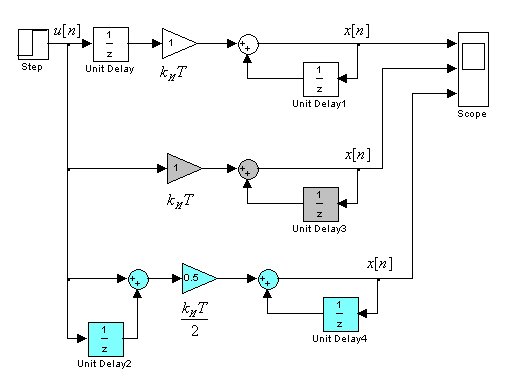
Рис. 2.7 – Модель И-регулятора.
Для реального дифференцирующего звена на рис. 2.8 построены модели, соответствующие трем методам преобразований. Для реализации пропорционального дискретного регулятора необходимо последовательно
с непрерывным звеном включить экстраполятор Zero Order Hold.
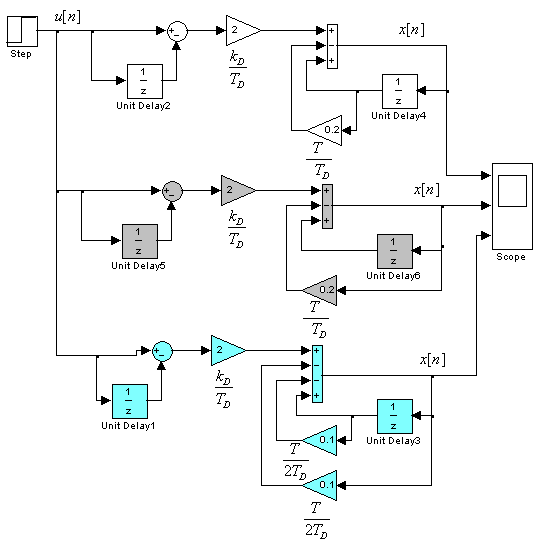
Рис. 2.8 – Модель реального интегрирующего звена.
|
|
|

Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...

Типы сооружений для обработки осадков: Септиками называются сооружения, в которых одновременно происходят осветление сточной жидкости...

Механическое удерживание земляных масс: Механическое удерживание земляных масс на склоне обеспечивают контрфорсными сооружениями различных конструкций...

Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!