Естественные скоростная и механическая характеристики. В двигателях последовательного возбуждения ток якоря одновременно является также током возбуждения  . Поэтому поток машины
. Поэтому поток машины  изменяется в широких пределах при изменении нагрузки. Используя выражение
изменяется в широких пределах при изменении нагрузки. Используя выражение  , можно записать уравнения скоростной и механической характеристик в следующем виде:
, можно записать уравнения скоростной и механической характеристик в следующем виде:
 ;
;  ,
,
где  . Из этих уравнений следует, что и скоростная и механическая характеристики являются мягкими, т.к. имеют гиперболический характер, рис.48.
. Из этих уравнений следует, что и скоростная и механическая характеристики являются мягкими, т.к. имеют гиперболический характер, рис.48.
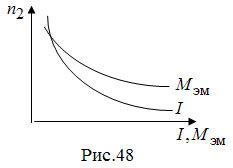 При малых токах скорость вращения якоря двигателя становится недопустимо большой. Поэтому работа двигателей последовательного возбуждения, за исключением двигателей малой мощности, на холостом ходу не допускается. Обычно минимально допустимая нагрузка составляет около 20-25% номинальной.
При малых токах скорость вращения якоря двигателя становится недопустимо большой. Поэтому работа двигателей последовательного возбуждения, за исключением двигателей малой мощности, на холостом ходу не допускается. Обычно минимально допустимая нагрузка составляет около 20-25% номинальной.
Отметим отличие в рабочих свойствах двигателей параллельного и последовательного возбуждения, которые вытекают из рассмотрения уравнений их характеристик. Поскольку у двигателей параллельного возбуждения  , а у двигателей последовательного возбуждения
, а у двигателей последовательного возбуждения  и при пуске допускается
и при пуске допускается  , то двигатели последовательного возбуждения развивают значительно больший пусковой момент по сравнению с двигателями параллельного возбуждения. У двигателей параллельного возбуждения скорость вращения почти постоянная и не зависит от нагрузке, а у двигателей последовательного возбуждения
, то двигатели последовательного возбуждения развивают значительно больший пусковой момент по сравнению с двигателями параллельного возбуждения. У двигателей параллельного возбуждения скорость вращения почти постоянная и не зависит от нагрузке, а у двигателей последовательного возбуждения  . Поэтому у двигателей параллельного возбуждения полезная мощность
. Поэтому у двигателей параллельного возбуждения полезная мощность  , а у двигателей последовательного возбуждения
, а у двигателей последовательного возбуждения  . Таким образом, у двигателей последовательного возбуждения, при изменении момента нагрузки в широких пределах, мощность изменяется в меньших пределах, чем у двигателей параллельного возбуждения.
. Таким образом, у двигателей последовательного возбуждения, при изменении момента нагрузки в широких пределах, мощность изменяется в меньших пределах, чем у двигателей параллельного возбуждения.
Поэтому для двигателей последовательного возбуждения менее опасны перегрузки по моменту, В связи с этим двигатели последовательного возбуждения имеют существенные преимущества в случае тяжелых условий пуска и изменения момента нагрузки в широких пределах. Они широко применяются в электрической тяги (электрифицированный транспорт) и в подъемно-транспортных установках.
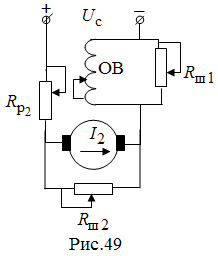
Регулирование скорости посредством ослабления магнитного потока производится либо путем шунтирования обмотки возбуждения некоторым сопротивлением  , либо уменьшением числа включенных в работу витков обмотки возбуждения, рис.49. В последнем случае должны быть предусмотрены соответствующие выводы из обмотки возбуждения.
, либо уменьшением числа включенных в работу витков обмотки возбуждения, рис.49. В последнем случае должны быть предусмотрены соответствующие выводы из обмотки возбуждения.
 Потери в шунтирующем сопротивлении
Потери в шунтирующем сопротивлении  малы, а суммарные потери на возбуждение даже уменьшаются. Вследствие этого КПД двигателя остается высоким, и такой способ регулирования широко применяется на практике. При регулировании скорости вращения ослаблением магнитного потока уменьшается или ток возбуждения, или уменьшается МДС обмотки возбуждения, в связи с чем скорость вращения возрастает.
малы, а суммарные потери на возбуждение даже уменьшаются. Вследствие этого КПД двигателя остается высоким, и такой способ регулирования широко применяется на практике. При регулировании скорости вращения ослаблением магнитного потока уменьшается или ток возбуждения, или уменьшается МДС обмотки возбуждения, в связи с чем скорость вращения возрастает.
Регулирование скорости вращения путем шунтирования якоря. При шунтировании якоря ток и поток возбуждения возрастают, а скорость вращения уменьшается. Шунтирующее сопротивление  практически находится под полным напряжением сети и потери в нем значительны, что приводит к сильному уменьшению КПД двигателя.
практически находится под полным напряжением сети и потери в нем значительны, что приводит к сильному уменьшению КПД двигателя.
Регулирование скорости вращения включением сопротивления в цепь обмотки якоря. Этот способ позволяет регулировать скорость вниз от номинальной. Так как одновременно при этом значительно уменьшается КПД двигателя из-за больших электрических потерь в добавочном сопротивлении в обмотке якоря  , то такой способ регулирования находит ограниченное применение.
, то такой способ регулирования находит ограниченное применение.

Регулирование скорости изменением напряжения. Этим способом можно регулировать скорость вниз от номинального значения с сохранением высокого КПД. Данный способ регулирования широко применяется в транспортных установках, где на каждой ведущей оси устанавливается отдельный двигатель и регулирование осуществляется путем переключения двигателей с параллельного включения в сеть на последовательное, рис.50. При этом напряжение на обмотке якоря уменьшается в два раза, в случае применения в транспортном средстве одинаковых по характеристикам двигателей, что обычно и делается.




