Двухпозиционное релейно-импульсное регулирование осуществляется с помощью регулятора, имеющего двухпозиционное устройство со статической характеристикой без зоны неоднозначности, которое переключается в зависимости от полярности входного сигнала регулятора, и импульсное устройство, формирующее на выходе регулятора последовательные импульсы постоянной величины, длительность, полярность и скважность которых определяется полярностью входного сигнала регулятора.
Полярность выходной величины двухпозиционного устройства противоположна полярности входного сигнала и равна + B l при  < 0 и – В 2 при
< 0 и – В 2 при  > 0 (рис. 1-3).
> 0 (рис. 1-3).
Полярность выходной величины импульсного устройства совпадает с полярностью входного сигнала регулятора, постоянна по величине и равна
(B 1 + B 2) при  > 0 и – (B 1 + B 2) при < 0.
> 0 и – (B 1 + B 2) при < 0.
В результате суммирования выходной величины от двухпозиционной части регулятора и выходной величины от импульсной части регулятора при длительности импульса t 2 и длительности паузы между импульсами t 1 на выходе регулятора при отрицательном входном сигнале формируется регулирующее воздействие, представленное на рис. 3-4.
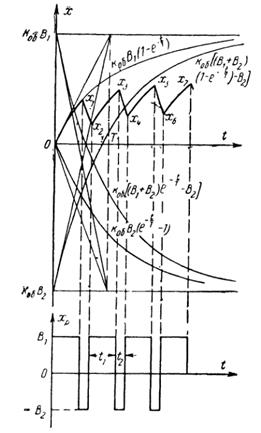
Рис. 3-4. Процесс увеличения регулируемой величины
при двухпозиционном релейно-импульсном регулировании объекта
с самовыравниванием при наличии запаздывания
На рис. 3-5 соответственно представлено регулирующее воздействие регулятора при положительном входном сигнале, длительности импульсов от импульсной части регулятора t 4 и длительности паузы t 3.
Таким образом, специфика систем регулирования с двухпозиционным релейно-импульсным регулятором заключается в том, что на объект регулирования последовательно поступают постоянные, в общем случае неодинаковые, положительные и отрицательные импульсы, соотношения длительностей которых меняются при изменении знака отклонения регулируемой величины от заданного значения.
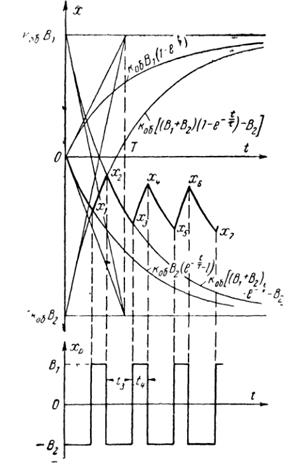
Рис. 3-5. Процесс уменьшения регулируемой величины
при двухпозиционном релейно-импульсном регулировании объекта
с самовыравниванием при наличии запаздывания
Следовательно, переходный процесс в системе автоматического регулирования с двухпозиционным релейно-импульсным регулятором, если известна реакция системы на ступенчатый импульс заданной амплитуды и длительности, можно найти путем суммирования составляющих переходного процесса от отдельных импульсов с учетом их длительности и полярности. Так как при двухпозиционном релейно-импульсном регулировании от импульсной части регулятора периодически поступает на объект регулирующее воздействие противоположного знака относительно регулирующего воздействия от двухпозиционной части регулятора, то процесс изменения регулируемой величины в объекте при этом замедляется и ее отклонение от заданного значения уменьшается. Для объекта с самовыравниванием при наличии запаздывания в системе (1-40) процесс увеличения регулируемой величины при двухпозиционном релейно-импульсном регуляторе имеет вид, представленный на рис. 3-4.
В конце каждого импульса притока и оттока энергии при поступлении на вход регулятора отрицательного сигнала значение регулируемой величины определяется следующими выражениями






где t 1 – длительность положительного импульса регулирующего воздействия на объект при отрицательном входном сигнале регулятора;
t 2 – длительность отрицательного импульса регулирующего воздействия на объект при отрицательном входном сигнале регулятора.
Используя метод полной математической индукции, находим, что положение регулируемой величины от заданного значения после (2 n +1) переключений регулятора равно.

или
 (3-3)
(3-3)
При поступлении на вход регулятора положительного сигнала отрицательное отклонение (рис. 3-5) регулируемой величины после (2 m + 1) переключений регулятора равно

или
 , (3-4)
, (3-4)
где t 3 – длительность отрицательного импульса регулирующего воздействия на объект при положительном входном сигнале регулятора;
t 4 – длительность положительном импульса регулирующего воздействия на объект при положительном входном сигнале регулятора.
На рис. 3-6 представлен процесс регулирования в установившемся состоянии при двухпозиционном релейно-импульсном регулировании объектов с самовыравниванием при наличии запаздывания.
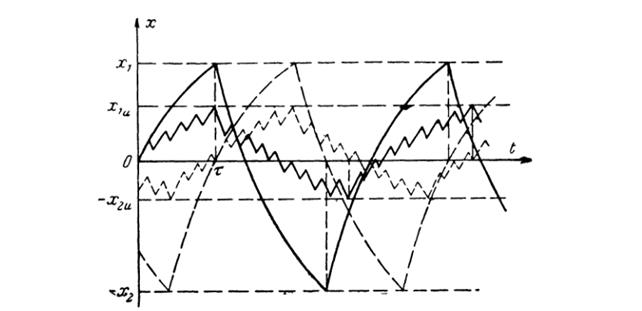
Рис. 3-6. Установившийся процесс двухпозиционного регулирования и двухпозиционного релейно-импульсного регулирования объекта с самовыравниванием при наличии запаздывания
Положительная амплитуда колебаний регулируемой величины при простом двухпозиционном регулировании равна:
 . (3-5)
. (3-5)
Отрицательная амплитуда
 . (3-6)
. (3-6)
Из рис. 3-5 и 3-6 следует, что наибольшая положительная амплитуда колебаний регулируемой величины при двухпозиционном релейно-импульсном регулировании будет при

где n – число полных циклов длительностью  за время запаздывания объекта.
за время запаздывания объекта.
С учетом этого, а также рис. 3-5 и 3-6 можно записать:

Обозначив отношение  , найдем
, найдем
 ,
,  . (3-7)
. (3-7)
Таким образом,
 (3-8)
(3-8)
Аналогично находит отрицательную амплитуду  колебаний при двухпозиционном релейно-импульсном регулировании
колебаний при двухпозиционном релейно-импульсном регулировании
 (3-9)
(3-9)
где
 ,
,  ,
,  .
.
Диапазон колебаний
 .
.
Из выражений (3-7) – (3-10) и рис. 3-6 следует, что при двухпозиционном релейно-импульсном регулировании объектов с самовыравниванием диапазон колебаний регулируемой величины при соответствующем выборе  и
и  может быть существенно уменьшен (теоретически до нуля) при любом запаздывании в системе.
может быть существенно уменьшен (теоретически до нуля) при любом запаздывании в системе.
Положительная амплитуда колебаний при двухпозиционном релейно-импульсном регулировании объекта без самовыравнивания будет равна
 . (3-11)
. (3-11)
Так как положительная амплитуда при простом двухпозиционном регулировании в этом случае равна  , то кратность ее уменьшения
, то кратность ее уменьшения  при двухпозиционном релейно-импульсном регулировании объекта без самовыравнивания определяется выражением
при двухпозиционном релейно-импульсном регулировании объекта без самовыравнивания определяется выражением
 (3-12)
(3-12)
Отрицательная амплитуда
 . (3-13)
. (3-13)
Кратность уменьшения отрицательной амплитуды колебаний
 (3-14)
(3-14)
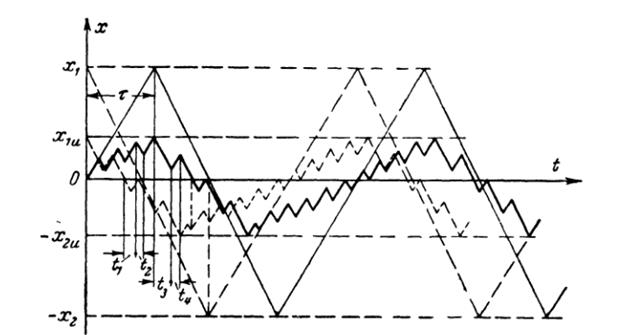
Рис. 3-7. Установившийся процесс двухпозиционного регулирования и двухпозиционного релейно-импульсного регулирования объекта без самовыравнивания при наличии запаздывания
Из выражений (3-12) и (3-14) следует, что для получения большей кратности уменьшения диапазона колебаний необходимо настраивать импульсную часть регулятора таким образом, чтобы значения  и
и  были близкими к максимальным.
были близкими к максимальным.
 ,
,  .
.
В этом случае кратности уменьшения положительной и отрицательной амплитуд соответственно равны
 ,
,  (3-15)
(3-15)
При симметричной статической характеристике двухпозиционной части регулятора
 .
.
В этом случае, например, при n = 10, из выражения (3-15) найдем, что положительная амплитуда колебаний уменьшается в 21 раз.
При наличии возмущающих воздействий на систему выбирать равными  и
и  нельзя, так как при этом регулятор не будет иметь возможности компенсировать возмущающие воздействия на объект.
нельзя, так как при этом регулятор не будет иметь возможности компенсировать возмущающие воздействия на объект.
Оптимальные значения и необходимо выбирать из условия
 ,
,  (3-16)
(3-16)
где  и
и  – минимальные регулирующие воздействия на объект соответственно при включении и выключении регулятора при максимальных возмущающих воздействиях;
– минимальные регулирующие воздействия на объект соответственно при включении и выключении регулятора при максимальных возмущающих воздействиях;
 и
и  – максимальные регулирующие воздействия на объект соответственно при включении и выключении регулятора при максимальных возмущающих воздействиях.
– максимальные регулирующие воздействия на объект соответственно при включении и выключении регулятора при максимальных возмущающих воздействиях.
На рис. 3-8 представлена одна из возможных схем двухпозиционного релейно-импульсном регулирования.
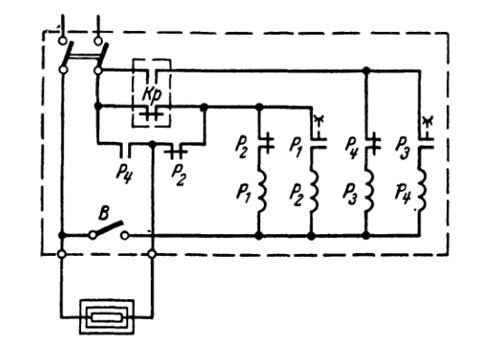
Рис. 3-8. Схема автоматического двухпозиционного релейно-импульсного регулирования температуры электропечи
Регулятор состоит из двухпозиционной части, образованной контактной группой Кр двухпозиционного измерительного устройства, и импульсной части, состоящей из двух импульс-пар.
При значении температуре ниже заданной размыкающие контакты контактной группы Кр и размыкающий контакт реле Р 2 в электропечь подается энергия. Одновременно работает пульс-пара на реле Р 1 и Р 2, которая периодически прекращает подачу энергии в объект от регулятора.
При значениях температуры выше заданной размыкается замыкающий контакт контактной группы КР. Подача энергии в объект прекращается и одновременно начинает работать пульс-пара на реле Р 3 и Р 4, которая через определенные промежутки времени будет возобновлять подачу энергии в электропечь через замыкающий контакт Р 4.
Импульсная часть регулятора настраивается путем изменения уставок реле времени Р 2 и Р 4.
При первоначальном включении объекта для его форсированного вывода на заданный режим можно
3-3. Электромеханические приставки
к двухпозиционным регуляторам
Для улучшения качества двухпозиционного регулирования находят широкое применение электромеханические корректирующие приставки. На
рис. 3-9 представлена одна из таких приставок.
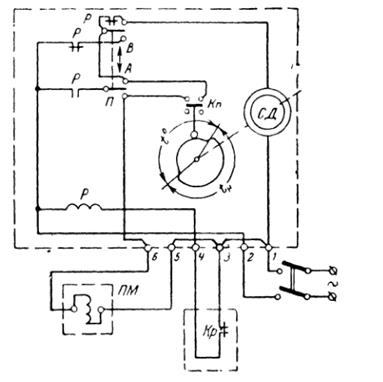
Рис. 3-9. Принципиальная схема электромеханической приставки
Она состоит из синхронного двигателя, например, типа СД с редуктором, кулачка с контактной группой Кп, переключателя П на два положения А и В и реле Р.
К зажимам 1, 2 подается питание, к зажимам 3, 4 подключается двухпозиционный регулятор, а к зажимам 5, 6 магнитный пускатель ПМ, коммутирующий подачу энергии в объект.
Рассмотрим процесс двухпозиционного регулирования с корректирующей электромеханической приставкой объекта без самовыравнивания.
Если статическая характеристика двухпозиционного регулятора несимметрична (рис. 1-5,б) и  , то переключатель П устанавливается в положение А. В этом случае при включении регулятора выходное значение регулируемой величины х будет непрерывно возрастать до заданного, так как контакт Кр двухпозиционного регулятора нормально замкнут, вследствие чего катушка реле Р возбуждена и ПМ получает постоянное питание.
, то переключатель П устанавливается в положение А. В этом случае при включении регулятора выходное значение регулируемой величины х будет непрерывно возрастать до заданного, так как контакт Кр двухпозиционного регулятора нормально замкнут, вследствие чего катушка реле Р возбуждена и ПМ получает постоянное питание.
При достижении выходной величиной заданного значения контакт Кр размыкается, катушка реле Р обесточивается и ПМ отключается от питания. При этом двигатель СД начнет вращать кулачок, отрабатывая время t o. По истечении этого времени замыкается контакт Кп и ПМ вновь получает питание в течение времени t н.
Благодаря запаздыванию в системе при выходном значении отклонения регулируемой величины, равном нулю (х = 0), промежуточное значение регулируемой величины (рис. 1-15) равно  . Так как выходная величина следует за промежуточной с запаздыванием на
. Так как выходная величина следует за промежуточной с запаздыванием на  , то
, то  будет равна положительной амплитуде колебаний регулируемой величины (рис. 3-10) при двухпозиционном регулировании без коррекции.
будет равна положительной амплитуде колебаний регулируемой величины (рис. 3-10) при двухпозиционном регулировании без коррекции.
Аналогично, отрицательная амплитуда колебаний равна  .
.
На рис. 3-10 представлен процесс двухпозиционного регулирования с коррекцией.
Величины времени  и
и  определяются путем расчета или графически таким образом, чтобы среднее значение параметра постепенно снижалось до заданного при
определяются путем расчета или графически таким образом, чтобы среднее значение параметра постепенно снижалось до заданного при  .
.
Дальнейшее систематическое уменьшение параметра приостанавливается благодаря тому, что с этого момента система (объект – регулятор) начинает через электромеханическую приставку оказывать стабилизирующее действие на процесс регулирования.
Так, при  происходит включение ПМ и выключение двигателя СД, так как в это время контакт Кр замкнется и катушка реле Р возбудится. При
происходит включение ПМ и выключение двигателя СД, так как в это время контакт Кр замкнется и катушка реле Р возбудится. При  контакт Кр разомкнётся и двигатель начнет отрабатывать остаток времени.
контакт Кр разомкнётся и двигатель начнет отрабатывать остаток времени.
Как видно из рис. 3-10, электромеханическая корректирующая приставка значительно уменьшает диапазон колебаний регулируемой величины.
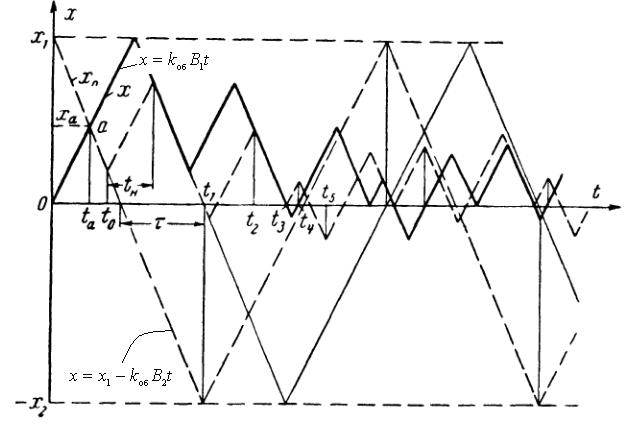
Рис. 3-10. Установившийся процесс двухпозиционного регулирования с электромеханической корректирующей приставкой объекта с запаздыванием при несимметричной статической характеристике регулятора 
Уравнения двух линий, пересекающихся в точке а:
 ,
, 
Из рис. 3-10 для точки  можем записать
можем записать

Так как  , то с учетом этого найдем
, то с учетом этого найдем
 .
.
Для осуществления устойчивой коррекции необходимо (рис. 3-10), чтобы время находилось в пределах  или
или
 .
.
С учетом этого при настройке электромеханической приставки величину времени можно определить из условия
 ,
,
Время времени формирования  может быть определено как сумма времени формирования переднего фронта и времени формирования заднего фронта треугольного положительного импульса
может быть определено как сумма времени формирования переднего фронта и времени формирования заднего фронта треугольного положительного импульса
.
 .
.
Подставляя  , получаем
, получаем
 .
.
В свою очередь, подставляя  в выражение для
в выражение для  , получаем
, получаем


или
 . (3-17)
. (3-17)
Величину можно найти из условия
 ,
,
откуда
 . (3-18)
. (3-18)
Таким образом, число оборотов кулачка корректирующей приставки должно быть равно

или
 . (3-19)
. (3-19)
Когда двухпозиционный регулятор имеет несимметричную статическую характеристику и  , переключатель П электромеханической приставки необходимо перевести в положение В. В этом случае двухпозиционное регулирование с коррекцией имеет вид, представленный на рис. 3-11.
, переключатель П электромеханической приставки необходимо перевести в положение В. В этом случае двухпозиционное регулирование с коррекцией имеет вид, представленный на рис. 3-11.
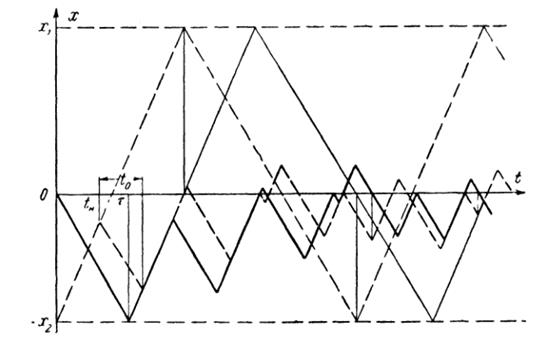
Рис. 3-11. Установившийся процесс двухпозиционного регулирования с электромеханической корректирующей приставкой объекта с запаздыванием при несимметричной статической характеристике регулятора 
Параметры настройки электромеханической приставки при  определяются выражениями:
определяются выражениями:
 . (3-20)
. (3-20)
Для форсированного вывода системы на заданный режим при первоначальном включении регулятора переключатель П следует переводить в положение В после достижения регулируемой величиной заданного значения. Выведенными формулами для определения параметров настройки электромеханической корректирующей приставки можно пользоваться и для объекта с самовыравниванием при условии линеаризации
(1-52) установившегося процесса двухпозиционного регулирования.








