Для осуществления позиционного регулирования измеряемой величины в электронные автоматические приборы, например типа ЭМП и ЭПП, могут встраиваться регулирующие устройства с различными законами регулирования.
На рис. 2-1, а представлено электрическое позиционное регулирующее устройство. Оно состоит из двух контактных групп К 1 и К 2 с кулачками Д 1 и Д 2 и двух промежуточных реле P 1 и Р 2 с ртутными выключателями В 1, В 2 и В 3 и В 4. Кулачки Д 1 и Д 2 кинематически связаны с ползунком реохорда измерительной системы прибора и их положение однозначно связано с показаниями прибора.
Контактные группы К 1 и К 2 смонтированы на общей плате и кинематически связаны с задающим устройством прибора.
Кулачки Д 1 и Д 2 имеют вид профильных дисков с впадинами. Контактная группа К 2 замкнута в интервале показаний прибора от начала шкалы до впадины диска Д и разомкнута в интервале от впадины до максимума шкалы.
Контактная группа К 2 наоборот, разомкнута в интервале показаний прибора от начала шкалы до впадины диска Д ч и замкнута в интервале от впадины до максимума шкалы.
Позиционное регулирующее устройство (рис. 2-1,а) позволяет осуществлять следующие режимы двухпозиционного регулирования:
1. Установив впадину диска Д на заданное значение регулируемой величины х = 0 и используя для регулирования зажимы 1 и 4, получим статическую характеристику (регулятора без зоны неоднозначности (рис. 1-5) с замкнутым выходным контактом при х < 0 и разомкнутым выходным контактом при х > 0.
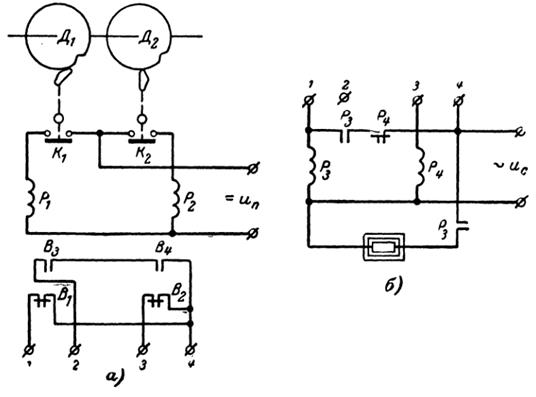
Рис. 2-1. Электрическое позиционное регулирующее устройство электронных автоматических мостов и потенциометров а) и пример б) его применения для регулирования температуры электропечи.
В этом режиме контактную группу К 2 можно использовать для аварийной сигнализации при недопустимых отклонениях регулируемой величины при больших возмущающих воздействиях на объект. При этом впадина диска Д 2 устанавливается в положение, соответствующее предельно допустимому значению регулируемой величины. Схема сигнализации подключается к зажимам 3 и 4.
Контактную группу К 2 так же можно использовать для дополнительного регулирующего воздействия на объект при недопустимых отклонениях регулируемой величины от заданного значения.
2. Установив впадину диска Д 2 на заданное значение регулируемой величины и, используя для регулирования контакты 3 и 4, получим статическую характеристику регулятора без зоны неоднозначности с разомкнутым выходным контактом при х < 0 и замкнутым выходным контактом при х > 0.
В этом режиме контактную группу К 1 так же можно использовать для целей сигнализации или дополнительного регулирующего воздействия на объект при предельно допустимых отклонениях регулируемой величины.
3. Установив впадину диска Д 1на нижний предел регулирования, а впадину диска Д 2 на верхний предел регулирования (или наоборот), получим статическую характеристику двухпозиционного регулятора с зоной неоднозначности (рис. 1-7). Величина зоны неоднозначности будет определяться расстоянием между впадинами дисков Д 1, и Д 2.
На рис. 2-1,6 представлена одна из возможных схем внешних соединений, обеспечивающих совместно с позиционным устройством рис. 2-1,а двухпозиционное регулирование температуры электропечи с зоной неоднозначности.
При включении регулятора через замкнутый контакт К 1 включается реле P 1, которое, срабатывая, замыкает ртутный контакт В 1. При этом срабатывает реле Р 3, подавая напряжение на нагревательный элемент электропечи.
При достижении температурой нижнего предела регулирования размыкается контактная группа К 1, отпускает реле P 1 и размыкается контакт В1, но при этом реле Р 3 остается включенным, так как при срабатывании оно самоблокируется через размыкающий контакт P 1.
При достижении температурой верхнего предела измерения замыкается контактная группа К 2, срабатывает реле Р 2 и замыкается ртутный контакт В 2, которое включает реле P 4. Реле Р 4 разрывает цепь самоблокировки реле Р 3, оно отпускает и прекращает подачу энергии в объект, температура которого начнет уменьшаться. При уменьшении температуры размыкается контактная группа К 2, обесточивается реле Р 2 и размыкается контакт В2.
При снижении температуры до нижнего предела регулирования замыкается контактная группа K 1, срабатывает реле P 1 и замыкается выключатель В 1, который включает реле Р 3, возобновляя подачу энергии в объект.
Температура объекта начнет увеличиваться, и процесс работы двухпозиционного регулятора будет повторяться.
Ртутные контакты В 3 и В 4 используются для сигнализации.
Зона неоднозначности статической характеристики регулятора может быть установлена в пределах от 0 до 20% шкалы прибора.
Конструкция задающего устройства регулятора позволяет установить заданное значение регулируемой величины в пределах от 5 до 95% шкалы прибора. Допустимая погрешность срабатывания контактов позиционного устройства ±1%.
Допустимая сила тока через ртутные контакты при безындуктивной нагрузке составляет 25 А при 127 В и 15 А при 220 В переменного напряжения.








