

Индивидуальные очистные сооружения: К классу индивидуальных очистных сооружений относят сооружения, пропускная способность которых...

Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
Индивидуальные очистные сооружения: К классу индивидуальных очистных сооружений относят сооружения, пропускная способность которых...
Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
Топ:
Отражение на счетах бухгалтерского учета процесса приобретения: Процесс заготовления представляет систему экономических событий, включающих приобретение организацией у поставщиков сырья...
Установка замедленного коксования: Чем выше температура и ниже давление, тем место разрыва углеродной цепи всё больше смещается к её концу и значительно возрастает...
Интересное:
Финансовый рынок и его значение в управлении денежными потоками на современном этапе: любому предприятию для расширения производства и увеличения прибыли нужны...
Отражение на счетах бухгалтерского учета процесса приобретения: Процесс заготовления представляет систему экономических событий, включающих приобретение организацией у поставщиков сырья...
Уполаживание и террасирование склонов: Если глубина оврага более 5 м необходимо устройство берм. Варианты использования оврагов для градостроительных целей...
Дисциплины:
|
из
5.00
|
Заказать работу |
Содержание книги
Поиск на нашем сайте
|
|
|
|
Электромеханические корректирующие приставки, как правило, удовлетворительно работают при относительно постоянных нагрузках и времени запаздывания, так как осуществляют коррекцию в функции времени без учета фактического значения регулируемого параметра.
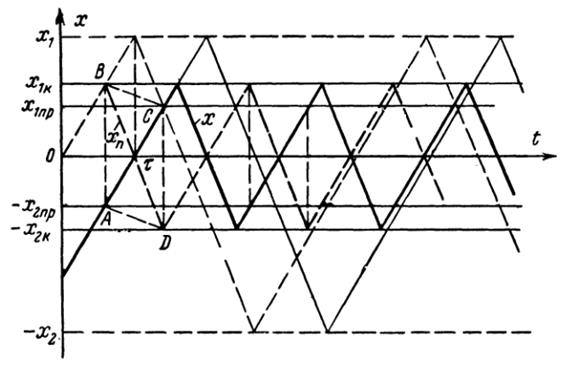
Рис. 3-12. Установившийся процесс двухпозиционного регулирования с двусторонней коррекцией
Вследствие этого в каждом конкретном случае требуется делать перерасчет, а иногда и полную замену прерывающего механизма устройства, что составляет большие неудобства при эксплуатации. В этом случае целесообразно применение релейно-контактных корректирующих приставок к двухпозиционному регулятору.
На рис. 3-12 представлен процесс двухпозиционного регулирования объекта без самовыравнивания с временем запаздывания  , для случая когда отрицательная амплитуда х 2 установившихся колебаний больше положительной х 1.
, для случая когда отрицательная амплитуда х 2 установившихся колебаний больше положительной х 1.
Как видно из рис. 3-12, качество двухпозиционного регулирования может быть существенно улучшено, если возобновление или прекращение подачи энергии в объект будет происходить не при достижении заданного значения регулируемой величиной, а с некоторым предварением.
Пусть при х 2 = х 2пр в точке А прекращается подача энергии в объект до того, как выходное значение регулируемой величины достигнет заданного значения. С этого момента промежуточное значение регулируемой величины  будет изменяться по прямой BD, а ее выходное значение по прямой АС. В общем случае линия BD может и не проходить через , но для расчета оптимального времени предварения, обеспечивающего симметричный процесс регулирования, целесообразно рассматривать именно этот случай, особенно если для объекта характерны значительные возмущения, как со стороны притока, так и оттока энергии.
будет изменяться по прямой BD, а ее выходное значение по прямой АС. В общем случае линия BD может и не проходить через , но для расчета оптимального времени предварения, обеспечивающего симметричный процесс регулирования, целесообразно рассматривать именно этот случай, особенно если для объекта характерны значительные возмущения, как со стороны притока, так и оттока энергии.
При x = x пр в точке С происходит с предварением возобновления подачи энергии в объект.
В этом случае регулирование будет осуществляться при колебаниях регулируемой величины, равных  , которые значительно меньше колебаний при регулировании без коррекции
, которые значительно меньше колебаний при регулировании без коррекции
 .
.
Таким образом, если при двухпозиционном регулировании дополнительно применить релейно-контактную приставку, которая с предварением изменяет знак регулирующего воздействия на объект, то при этом качество двухпозиционного регулирования может быть существенно улучшено.
Для устойчивого регулирования с коррекцией (рис. 3-12) при х = х 1пр и dx / dt > 0 необходимо, чтобы  , а при dx / dt > 0 и
, а при dx / dt > 0 и  , необходимо, чтобы
, необходимо, чтобы  . Если, например, при
. Если, например, при  и dx / dt > 0 окажется, что
и dx / dt > 0 окажется, что  , то при последующем уменьшении х, следуя за величиной , не достигнет значения х2пр и в этом случае предварительного переключения регулятора не произойдет. Следовательно, величина
, то при последующем уменьшении х, следуя за величиной , не достигнет значения х2пр и в этом случае предварительного переключения регулятора не произойдет. Следовательно, величина  определяет запас обеспечения коррекции со стороны отрицательной амплитуды колебаний, а величина
определяет запас обеспечения коррекции со стороны отрицательной амплитуды колебаний, а величина  определяет запас обеспечения коррекции со стороны положительной амплитуды.
определяет запас обеспечения коррекции со стороны положительной амплитуды.
Процесс установившегося двухпозиционного регулирования с коррекцией определяется параллелограммом ABCD.
Из рис. 3-12 очевидно, что
 .
.
Следовательно, с помощью релейно-контактной схемы даже при двусторонней коррекции нельзя уменьшить диапазон колебаний регулируемой величины больше, чем до значения меньшей амплитуды колебаний при регулировании без коррекции.
Так как осуществление релейно-контактной схемы с ограничением только отрицательной или положительной амплитуды значительно проще, то для улучшения качества двухпозиционного регулирования следует применять релейно-контактные приставки с односторонней коррекцией.
На рис. 3-13 представлен двухпозиционный регулятор с релейно-контактными элементами, обеспечивающими двухпозиционное регулирование температуры электропечи с. ограничением отрицательной амплитуды.
Контакты К о двухпозиционного регулятора переключаются при заданном значении регулируемой величины  .
.
Двухпозиционный регулятор или двухпозиционное регулирующее устройство (рис. 2-1) должны иметь дополнительный контакт  , который разомкнут при
, который разомкнут при  и замкнут при
и замкнут при  (рис. 3-13,6).
(рис. 3-13,6).
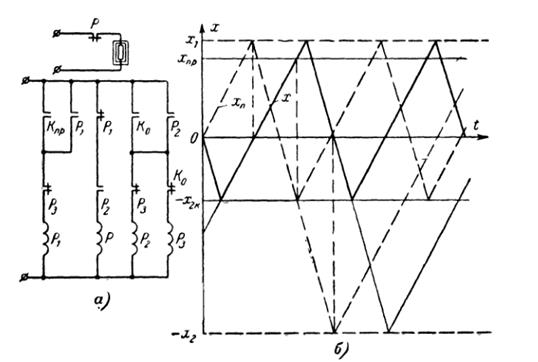
Рис. 3-13. Электрическая схема релейно-контактной корректирующей приставки а) с коррекцией со стороны отрицательной амплитуды колебаний регулируемой величины б)
При включении регулятора при х <0 срабатывания его элементов не происходит и в объект подается энергия через размыкающий контакт выходного реле Р. При увеличении температуры до заданного значения замыкается контакт регулятора К 0 и срабатывает промежуточное реле Р 2, которое самоблокируется через размыкающий контакт реле Р 3.
Реле Р 2 включает выходное реле Р, которое прекращает подачу энергии в объект. С этого момента промежуточное значение регулируемой величины х п начнет уменьшаться, значение же регулируемой величины х на выходе объекта, в связи с наличием запаздывания, будет увеличиваться. При значении  замкнется контакт К пр и сработает реле Р 1, которое самоблокируется через размыкающий контакт реле Р 3. Реле Р 1 отключит реле Р, в результате чего с предварением возобновится подача энергии в объект (рис. 3-13). Регулируемая величина на выходе будет возрастать до значения
замкнется контакт К пр и сработает реле Р 1, которое самоблокируется через размыкающий контакт реле Р 3. Реле Р 1 отключит реле Р, в результате чего с предварением возобновится подача энергии в объект (рис. 3-13). Регулируемая величина на выходе будет возрастать до значения  , после чего она начнет уменьшаться, следуя за ее промежуточным значением х п с запаздыванием. При разомкнётся контакт К пр. При
, после чего она начнет уменьшаться, следуя за ее промежуточным значением х п с запаздыванием. При разомкнётся контакт К пр. При  переключатся в исходное положение контакты К о, сработает реле Р 3, которое отключит реле Р 1 и Р 2. Реле Р 2 в свою очередь отключит реле Р 3 и схема придет в исходное положение.
переключатся в исходное положение контакты К о, сработает реле Р 3, которое отключит реле Р 1 и Р 2. Реле Р 2 в свою очередь отключит реле Р 3 и схема придет в исходное положение.
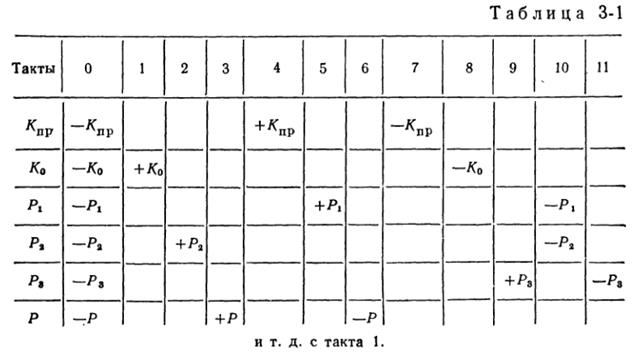
После уменьшения значения регулируемой величины до х2к, следуя за изменением х п, она начнет увеличиваться, и процесс регулирования будет повторяться. Последовательность работы элементов схемы представлена в табл. 3-1. Таблица 3-1
При регулировании с коррекцией уменьшение диапазона колебаний регулируемой величины тем больше, чем больше несимметричность колебаний двухпозиционного регулирования без коррекции.
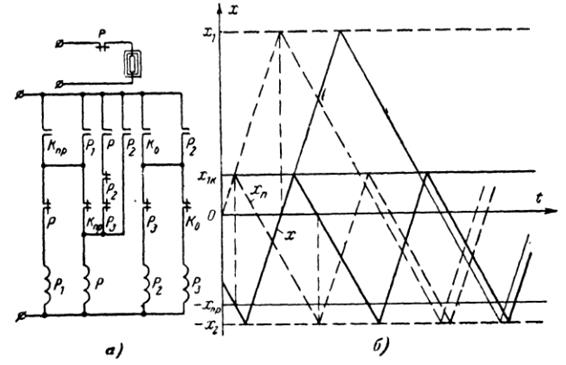
Рис. 3-14. Электрическая схема релейно-контактной корректирующей приставки а) с коррекцией со стороны положительной амплитуды колебаний регулируемой величины б)
Так, если х 2 = 2 х 1 то диапазон колебаний при регулировании с коррекцией может быть уменьшен примерно на 60%. При x 2=5 x 1 диапазон колебаний может быть уменьшен на 80%.
На рис. 3-14 представлен двухпозиционный регулятор с релейно-контактными элементами, обеспечивающий двухпозиционное регулирование с ограничением положительной амплитуды. Его целесообразно применять, когда положительная амплитуда колебаний при регулировании без коррекции больше отрицательной амплитуды. В этом случае контактная группа К пр двухпозиционного регулятора должна иметь два переключающихся контакта.
Последовательность работы элементов схемы представлена в табл. 3-2. Установившийся процесс регулирования представлен на рис. 3‑14. Если в двухпозиционном регуляторе не будет хватать числа контактов К о и К пр, то можно применить дополнительные реле.

В табл. 3-2 последовательность работы элементов схемы
(такты 1 – 6) относится к процессу вывода регулируемой величины на заданный режим при первоначальном включении регулятора. С такта 7 начинается установившийся процесс регулирования, и работа элементов схемы будет периодически повторяться.
При настройке регулятора необходимо иметь в виду, чтобы при максимальном ожидаемом возмущающем воздействии на объект соблюдалось условие  для регулятора рис. 3-13 и
для регулятора рис. 3-13 и  для регулятора рис. 3-14.
для регулятора рис. 3-14.
Релейно-контактная схема, обеспечивающая коррекцию, может быть конструктивно выполнена отдельно в виде приставки к двухпозиционному регулятору.
При этом схема релейно-контактной корректирующей приставки должна быть унифицирована с целью возможности ее использования, как в режиме ограничения положительной амплитуды, так и в режиме ограничения отрицательной амплитуды колебаний регулируемой величины путем простого перевода вручную переключателя режимов.
Рассмотрим несколько числовых примеров по улучшению качества двухпозиционного регулирования.
Пример 1. При выходе системы автоматического регулирования, рассмотренной в п. 5 гл. 1, на заданный режим подключим последовательно с основным нагревательным элементом с сопротивлением R = 900 Ом дополнительный нагревательный элемент с сопротивлением R 1 = 250 Ом.
В этом случае общее сопротивление нагревательных элементов будет равно
 = 900 + 250=1 150 Ом.
= 900 + 250=1 150 Ом.
Количество энергии  в единицу времени, выделяемой нагревательными элементами, при включении регулятора, будет равно
в единицу времени, выделяемой нагревательными элементами, при включении регулятора, будет равно
 4,7 ккал/с.
4,7 ккал/с.
Так как  = 6,0 ккал/с, в этом случае мы получаем систему автоматического регулирования с неполным притоком при установившихся колебаниях в системе.
= 6,0 ккал/с, в этом случае мы получаем систему автоматического регулирования с неполным притоком при установившихся колебаниях в системе.
Регулирующее воздействие регулятора при его включении в приращениях от условно равновесного состояния системы равно
 0,175 ккал/с.
0,175 ккал/с.
Если при выключении регулятора нагревательные элементы полностью отключаются, то  =1.
=1.
Согласно (1-47) находим диапазон колебаний регулируемой величины
 =(0,175+ 1) (1 – e –0.05) +0,0102 e –0.05 = 0,067.
=(0,175+ 1) (1 – e –0.05) +0,0102 e –0.05 = 0,067.
В абсолютных единицах
= 0,067 – 200=13,4°С.
Таким образом, при автоматическом регулировании неполным притоком энергии при данных параметрах системы диапазон колебаний регулируемой величины в системе уменьшается на
 .
.
Пример 2. В системе автоматического регулирования, рассмотренной в п. 5 гл. 1, выполним нагревательный элемент из двух секций, сопротивления которых одинаковы и равны
 = 1 800 Ом.
= 1 800 Ом.
При включении регулятора эти секции соединяются параллельно, а при выключении регулятора они соединяются последовательно (см. рис. 1-10).
Находим сопротивление нагревательного элемента при включении регулятора
 = 900 Ом.
= 900 Ом.
Следовательно, регулирующее воздействие регулятора при его включении равно  = 0,5.
= 0,5.
Определим количество энергии  в единицу времени, которая выделяется нагревательными элементами при отключении регулятора
в единицу времени, которая выделяется нагревательными элементами при отключении регулятора
 1,5 ккал/с.
1,5 ккал/с.
Если при выключении регулятора энергия в объект не поступает, то с течением времени вся энергия, запасенная нагревательной печью, рассеивается в окружающую среду и температура печи снизится до значения температуры окружающей среды. В этом случае при достаточно длительном выключении регулятора мы имеем полный отток энергии, ранее запасенной объектом при включении регулятора.
Если же при выключении регулятора в объект будет поступать некоторое уменьшенное количество энергии , то в этом случае при достаточно длительном отключении регулятора температура в печи в установившемся состоянии снизится только до некоторого значения  , которое будет выше значения температуры окружающей среды. Для объекта это равноценно неполному оттоку энергии в окружающую среду.
, которое будет выше значения температуры окружающей среды. Для объекта это равноценно неполному оттоку энергии в окружающую среду.
В нашем случае
 75° С.
75° С.
Таким образом, мы имеем систему автоматического регулирования с неполным оттоком энергии.
Регулирующее воздействие на объект при выключении регулятора равно:
 0,625.
0,625.
По (1-47) находим диапазон колебаний регулируемой величины
 = (0,5 + 0,625) (1 – e –0.05) +0,0102e–0.05 = 0,065
= (0,5 + 0,625) (1 – e –0.05) +0,0102e–0.05 = 0,065
или
 = 13° С.
= 13° С.
Диапазон колебаний регулируемой величины при неполном оттоке уменьшается на
 .
.
Пример 3. В п. 2 подключим один нагревательный элемент непосредственно на напряжение  = 150 в, а регулятором будем отключать и включать только второй нагревательный элемент.
= 150 в, а регулятором будем отключать и включать только второй нагревательный элемент.
В этом случае имеем также систему с неполным оттоком
 = 3 ккал/с;
= 3 ккал/с;
 = 0,25.
= 0,25.
Диапазон колебаний будет равен
= (0,5+0,25) (1 – e –0.05) +0,0102 e –0.05 =0,04.
В абсолютных единицах = 8° С. Диапазон колебаний уменьшается на 51,7%.
Пример 4. В п. 3 при выходе системы на заданный режим последовательно с нагревательным элементом, который включается и отключается регулятором, включается дополнительный нагревательный элемент с сопротивлением
 =1 800 Ом. В этом случае будем иметь систему автоматического регулирования с неполным притоком и оттоком
=1 800 Ом. В этом случае будем иметь систему автоматического регулирования с неполным притоком и оттоком
 4,5 ккал/с;
4,5 ккал/с;
 0,25.
0,25.
Диапазон колебаний регулируемой величины
= (0,125+0,25) (1 – e –0.05) +0,0102 e –0.05 =0,04 = 0,028.
или
= 5,6° С.
Диапазон колебаний регулируемой величины уменьшается почти в 3 раза.
При определении величины неполного притока и оттока необходимо учитывать, чтобы величина коммутируемой энергии регулятором полностью компенсировала бы максимально возможные возмущающие воздействия на объект.
Пример 5. Необходимо спроектировать систему автоматического двухпозиционного регулирования температуры электропечи с передаточной функцией
 ,
,
где  = 1,
= 1,  = 5 мин, = 2 мин.
= 5 мин, = 2 мин.
Регулирующее воздействие регулятора  = 0,5,
= 0,5,  =1. Заданное значение температуры
=1. Заданное значение температуры  = 500° С. Диапазон колебаний температуры должен быть не более 30° С.
= 500° С. Диапазон колебаний температуры должен быть не более 30° С.
Если для данного объекта применить простое двухпозиционное регулирование, то даже в случае статической характеристики регулятора без зоны неоднозначности благодаря большому запаздыванию в системе колебания температуры будут недопустимо большими
 = 0,495.
= 0,495.
или
 =248 ° С
=248 ° С
Для улучшения качества регулирования к данному двухпозиционному регулятору на его выходе подключим прерывающее устройство с параметрами  =0,3,
=0,3,  =1,3,
=1,3,  =10.
=10.
По формуле (3-9) найдем положительную амплитуду колебаний температуры при двухпозиционном релейно-импульсном регулировании
 =
=

По выражению (3-10) находим отрицательную амплитуду колебаний температуры


Диапазон колебаний амплитуды
 =0,018+0,039=0,057
=0,018+0,039=0,057
или
= 0,057- 500 = 28,5° С.
Таким образом, благодаря применению прерывающего устройства с выбранными параметрами колебания температуры уменьшились почти в 9 раз.
Чем ближе будет выбираться значение  к
к  , а
, а  , тем меньше будет диапазон колебаний регулируемой величины.
, тем меньше будет диапазон колебаний регулируемой величины.
При  и
и  диапазон колебаний в нашей системе будет равен всего
диапазон колебаний в нашей системе будет равен всего  =3,5° С.
=3,5° С.
Пример 6. Имеем систему автоматического регулирования температуры электропечи с двухпозиционным релейно-импульсным регулятором (рис. 3-8). Параметры электропечи как объекта регулирования приведены в примере 4 гл. I.
Требуется определить оптимальные параметры настройки регулятора, если известно, что возмущающими воздействиями на систему являются колебания напряжения в сети  = ±10%
= ±10%  и колебания температуры окружающей среды
и колебания температуры окружающей среды  = ±10° С.
= ±10° С.
Определим максимальное количество энергии в единицу времени, выделяемое нагревательным элементом при включении регулятора
 7,26 ккал/с.
7,26 ккал/с.
Соответственно
 = 4,86 ккал/с.
= 4,86 ккал/с.
Максимальное регулирующее воздействие регулятора при его включении равно:
 0,81.
0,81.
Минимальное регулирующее воздействие
 0,21.
0,21.
Так как в установившемся состоянии  , то максимальное регулирующее воздействие регулятора при его выключении будет равно:
, то максимальное регулирующее воздействие регулятора при его выключении будет равно:
 1,05.
1,05.
Минимальное регулирующее воздействие
 0,95.
0,95.
Согласно (3-16) определяем оптимальные параметры настройки регулятора
 ,
,
 .
.
При запаздывании в системе = 4 мин и числе полных циклов за время запаздывания, например,  по выражению (3-7) находим выдержки времени реле Р 1 (рис. 3-8) при включении t 1 и выключении t 2
по выражению (3-7) находим выдержки времени реле Р 1 (рис. 3-8) при включении t 1 и выключении t 2
 с,
с,
 с.
с.
По формулам (3-10) находим выдержки времени при включении t 3 и выключении t 4 реле Р 4
,  =10 с,
=10 с,
 с.
с.
|
|
|

Историки об Елизавете Петровне: Елизавета попала между двумя встречными культурными течениями, воспитывалась среди новых европейских веяний и преданий...

Своеобразие русской архитектуры: Основной материал – дерево – быстрота постройки, но недолговечность и необходимость деления...

История развития хранилищ для нефти: Первые склады нефти появились в XVII веке. Они представляли собой землянные ямы-амбара глубиной 4…5 м...

Опора деревянной одностоечной и способы укрепление угловых опор: Опоры ВЛ - конструкции, предназначенные для поддерживания проводов на необходимой высоте над землей, водой...
© cyberpedia.su 2017-2025 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!

