а) Объект без самовыравнивания.
Передаточная функция объекта без самовыравнивания имеет вид
 (1-7)
(1-7)
При поступлении на вход объекта от двухпозиционного регулятора величины  (см. рис. 1-12 а) регулируемая величина будет изменяться по прямой (рис. 1-12 б)
(см. рис. 1-12 а) регулируемая величина будет изменяться по прямой (рис. 1-12 б)
 (1-8)
(1-8)
Если двухпозиционный регулятор имеет симметричную статическую характеристику (рис. 1-12 в) с зоной неоднозначности, то включение регулятора будет происходить при достижении регулируемой величиной граничных значений зоны неоднозначности (рис. 1-12 г и д).
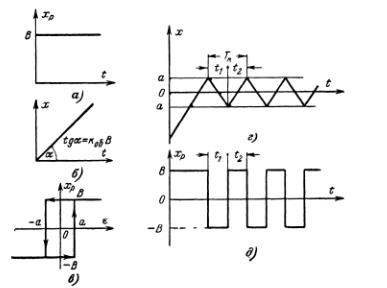
Рис. 1-12. Переходные процессы в системе (г) и регуляторе (д) при двухпозиционном регуляторе с переходной функцией (а) и симметричной статической характеристикой с зоной неоднозначности (в) в случае объекта без самовыравнивания с переходной функцией (б)
В системе в установившемся состоянии возникают периодические симметричные колебания регулируемой величины относительно ее заданного значения. Диапазон колебаний регулируемой величины
 . (1-9)
. (1-9)
Длительность положительного импульса
 (1.10)
(1.10)
Период колебаний
 (1.11)
(1.11)
Частота переключений регулятора в единицу времени
 (1.12)
(1.12)
Если статическая характеристика регулятора имеет вид, представленный на рис. 1-7б, то установившиеся колебания регулируемой величины имеют вид, приведенный на рис. 1-13.
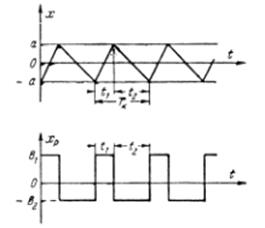
Рис. 1-13. Переходный процесс в системе и регуляторе при несимметричной статической характеристике двухпозиционного регулятора с зоной неоднозначности и объекта без самовыравнивания
В этом случае длительность положительного и отрицательного импульсов в установившемся процессе соответственно равна
 ,
,  (1.13)
(1.13)
Период колебаний
 . (1.14)
. (1.14)
Частота переключений регулятора в единицу времени
 (1.15)
(1.15)
Из рис. 1-12 и 1-13, а также выражения (1-9) следует, что уменьшение диапазона колебания регулируемой величины возможно только за счет уменьшения зоны неоднозначности регулятора.
Однако при этом следует иметь в виде, что уменьшение диапазона колебаний приводит к увеличению частоты переключений регулятора.
Так из выражений (1-12) и (1-15) следует, что при диапазоне колебаний регулируемой величины, стремящемся к нулю, частота переключений стремится к бесконечности.
Из выражений (1-12) и (1-15) следует, что для уменьшения частоты переключений двухпозиционного регулятора необходимо уменьшить величину коммутируемой энергии В регулятором.
б) Одноемкостный объект с самовыравниванием.
Передаточная функция объекта управления
 (1-16)
(1-16)
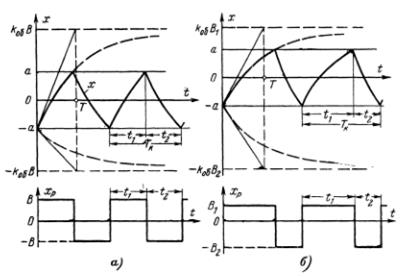
Рис. 1-14. Установившийся процесс регулирования в системе и регуляторе при симметричной (а) и несимметричной (б) статических характеристиках двухпозиционного регулятора с зоной неоднозначности в случае объекта с самовыравниванием
При поступлении в установившемся состоянии ступенчатой постоянной величины B регулируемая величина изменяется по экспоненциальному закону
 (1.17)
(1.17)
С учетом выражения (1.17) и рис. 1.14, находим диапазон колебаний
 (1.18)
(1.18)
Определим длительность переднего фронта  из условия
из условия
 ;
;
 ;
;
 ;
;
 ;
;
Окончательно
Находим длительность импульсов регулятора
 (1.19)
(1.19)
Период установившихся колебаний
 (1.20)
(1.20)
Частота переключений регулятора
 (1.21)
(1.21)
Если статическая характеристика регулятора имеет вид, представленный на рис. 1.7б, то длительность импульсов будет равна
 (1.22)
(1.22)
Период установившихся колебаний
 (1.23)
(1.23)
Частота переключений регулятора определяется как величина, обратная полупериоду колебаний.
Из выражений (1-20) - (1-23) следует, что при одноемкостном объекте с самовыравниванием, так же как и в случае без самовыравнивания, уменьшение зоны нечувствительности приводит к уменьшению периода колебаний и увеличению числа переключений регулятора. Уменьшение числа переключений возможно за счет уменьшения величины энергии, коммутируемой регулятором. Однако при этом снижаются компенсирующие возможности в отношении возмущающих воздействий на объект.
Увеличение постоянной времени объекта при прочих равных условиях также увеличивает период колебаний и уменьшает частоту переключений регулятора.
При зоне неоднозначности статической характеристики, равной нулю, число переключений двухпозиционного регулятора должно быть равно бесконечности. Поэтому в системах автоматического регулирования без запаздывания двухпозиционные регуляторы со статической характеристикой без зоны нечувствительности (рис. 1-5) работают ненадежно.
Рассмотрим примеры определения параметров регулятора при отсутствии запаздывания в системе.
Пример 1. Имеем систему регулирования уровня воды в резервуаре, отличающуюся от системы 1-6 тем, что из резервуара вода подается к потребителю с помощью насоса, производительность которого  не зависит от уровня воды в резервуаре. Заданный уровень воды в резервуаре равен
не зависит от уровня воды в резервуаре. Заданный уровень воды в резервуаре равен  = 5 м. Центробежный насос, подающий воду в резервуар, обеспечивает производительность
= 5 м. Центробежный насос, подающий воду в резервуар, обеспечивает производительность  , равную данному расходу
, равную данному расходу  при числе оборотов двигателя
при числе оборотов двигателя  , равном 50 % от номинального числа оборотов двигателя
, равном 50 % от номинального числа оборотов двигателя  .
.
Коэффициент передачи объекта  = 10–3 с–1. Допустимое число включений двигателя
= 10–3 с–1. Допустимое число включений двигателя  = 20 включений/ч.
= 20 включений/ч.
Требуется определить, на каком расстоянии относительно заданного уровня необходимо установить контактные электроды.
Так как производительность нагнетающего и отсасывающего насосов практически не зависит от уровня воды в резервуаре, то объект в динамическом отношении может быть представлен интегрирующим звеном с передаточной функцией (1-7). В связи с тем, что производительность насосов пропорциональна числу оборотов, то регулирующее воздействие регулятора в приращениях от заданного уровня равно

или в относительных единицах
 .
.
Из выражения (1-12) находим диапазон колебаний уровня воды в резервуаре в относительных единицах:
 ,
,
где  .
.
Таким образом, электроды в резервуаре должны быть установлены на отметках
 м;
м;
 м.
м.
Диапазон колебаний уровня воды в резервуаре в абсолютных единицах равен
 м.
м.
Пример 2. На систему, рассмотренную в примере 1, действует возмущающее воздействие со стороны оттока, для компенсации которого в равновесном состоянии необходимо увеличение числа оборотов нагнетающего насоса на  .
.
Требуется определить частоту включений электродвигателя, время его включенного и отключенного состояния за один период и продолжительность включения ПВ в процентах.
Определим при включении электродвигателя регулирующее воздействие B 1 регулятора на объект в приращениях от условно равновесного состояния в относительных единицах
 ,
,
где  – число оборотов электродвигателя при новом условно равновесном состоянии.
– число оборотов электродвигателя при новом условно равновесном состоянии.
Соответственно, при отключении электродвигателя регулирующее воздействие будет равно:
 .
.
Согласно (1-15) находим частоту переключений регулятора:
 переключений/ч.
переключений/ч.
Число включений электродвигателя
 включений/ч.
включений/ч.
По (1-13) определяем время включенного состояния электродвигателя
 мин
мин
И время его отключенного состояния за один период
 мин
мин
Продолжительность включения электродвигателя
 %.
%.
Пример 3. Имеем систему автоматического регулирования уровня воды в резервуаре, принципиальная схема которой изображена на рис 1-6.
Заданное значение уровня  . Электроды установлены на отметках
. Электроды установлены на отметках
 ,
,  .
.
В равновесном состоянии  .
.
Коэффициент передачи объекта регулирования  и постоянная времени
и постоянная времени  мин. Требуется определить период установившихся колебаний уровня воды в резервуаре.
мин. Требуется определить период установившихся колебаний уровня воды в резервуаре.
Так как в этом случае расход воды из резервуара зависит от уровня, то в динамическом отношении объект регулирования является инерционным звеном первого порядка с передаточной функцией (1-16). регулирующее воздействие регулятора на объект равно  и
и  .
.
Из (1-22) находим:  мин;
мин;  мин.
мин.
Период установившихся колебаний
 мин.
мин.








