а) Объект без самовыравнивания с запаздыванием
Так как запаздывающее звено имеет передаточную функцию
 , (1-24)
, (1-24)
то с учетом (1-7), объект без самовыравнивания с запаздыванием имеет передаточную функцию
 , (1-25)
, (1-25)
где  – время запаздывания.
– время запаздывания.
Таким образом, объект без самовыравнивания с запаздыванием можно представить в динамическом отношении в виде интегрирующего и запаздывающего звеньев, соединенных последовательно (рис. 1-15, а).

Рис. 1-15. Представление объекта с запаздыванием в виде объекта без самовыравнивания, последовательно соединенного со звеном запаздывания (а)
при отсутствии (б) и наличии (в) запаздывания в нем при постоянном регулирующем воздействии на объект
Установившийся процесс регулирования в системе и регуляторе при симметричной (а) и несимметричной (б) статических характеристиках двухпозиционного регулятора с зоной неоднозначности в случае объекта с самовыравниванием
При поступлении на вход регулятора ступенчатого воздействия  выходная величина интегрирующего звена, которая является внутренней промежуточной величиной
выходная величина интегрирующего звена, которая является внутренней промежуточной величиной  объекта, (см. рис. 1-15), будет изменяться по прямой
объекта, (см. рис. 1-15), будет изменяться по прямой  . Так как при прохождении через запаздывающее звено сигнал не меняет своей формы, а только сдвигается по времени на величину запаздывания , то выходная величина объекта (рис. 1-15 в) будет изменяться по прямой
. Так как при прохождении через запаздывающее звено сигнал не меняет своей формы, а только сдвигается по времени на величину запаздывания , то выходная величина объекта (рис. 1-15 в) будет изменяться по прямой  .
.
В связи с тем, что регулятор реагирует на изменение выходной величины объекта, диапазон колебаний регулируемой величины (рис. 1-16) при наличии запаздывания в системе будет больше зоны неоднозначности статической характеристики (рис. 1-7 в) двухпозиционного регулятора.
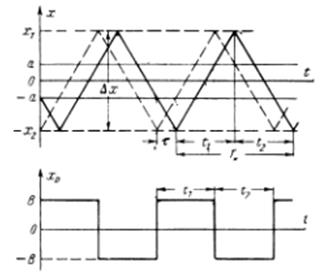
Рис. 1-16. Установившийся процесс регулирования в системе и регуляторе при симметричной статической характеристике двухпозиционного регулятора с зоной неоднозначности в случае объекта без самовыравнивания при наличии запаздывания в системе
При симметричной характеристике регулятора длительность положительного импульса равна длительности отрицательного импульса и определяется выражением
 . (1-26)
. (1-26)
Период колебаний
 . (1-27)
. (1-27)
Частота переключений регулятора
 . (1-28)
. (1-28)
Диапазон колебаний регулируемой величины
 . (1-29)
. (1-29)
Из выражений (1-26) - (1-29) следует, что чем больше время запаздывания в системе, тем больше диапазон колебаний регулируемой величины и тем меньше частота переключений регулятора.
Для объектов с запаздыванием в большинстве случаев целесообразно применении е регуляторов без зоны неоднозначности (рис. 1-5, в).
В этом случае период колебаний будет равен
 . (1-30)
. (1-30)
Число переключений регулируемой величины
 . (1-31)
. (1-31)
Диапазон колебаний регулируемой величины
 . (1-32)
. (1-32)
Если регулятор имеет несимметричную статическую характеристику с зоной неоднозначности (рис. 1-7, б), то длительность положительного импульса будет равна
 . (1-33)
. (1-33)
Длительность отрицательного импульса
 . (1-34)
. (1-34)
Период колебаний
 . (1-35)
. (1-35)
Частота переключений регулятора
 . (1-36)
. (1-36)
Диапазон колебаний регулируемой величины
 . (1-37)
. (1-37)
Положительная амплитуда отклонения регулируемой величины
 .
.
Отрицательная амплитуда отклонения
 .
.
Так как положительная и отрицательная амплитуды колебаний не равны, то среднее значение регулируемой величины отличается от нулевого на величину
 (1-38)
(1-38)
Следовательно, при наличии запаздывания в системе и несимметричной статической характеристике регулятора при установке задания регулятору необходимо заданное значение регулируемой величины устанавливать отличной от требуемого ее значения по условиям технологии на величину  . В этом случае среднее значение колебаний регулируемой величины в процессе регулирования будет равно ее заданному значению по требованию технологии.
. В этом случае среднее значение колебаний регулируемой величины в процессе регулирования будет равно ее заданному значению по требованию технологии.
При наличии постоянного по величине возмущающего воздействия на объект  , согласно (1-32), в законе регулирования появляется дополнительная погрешность
, согласно (1-32), в законе регулирования появляется дополнительная погрешность
 (1-39)
(1-39)
Таким образом, чем больше запаздывание в системе, тем больше погрешность регулирования при возмущающих воздействиях на систему.
б) Одноемкостный объект с самовыравниванием
С учетом (1-16), передаточная функция объекта с самовыравниванием при наличии запаздывания  будет равна:
будет равна:
 (1-40)
(1-40)
Установившийся процесс регулирования при симметричной статической характеристике двухпозиционного регулятора с зоной неоднозначности имеет вид, представленный на рис. 1-17.
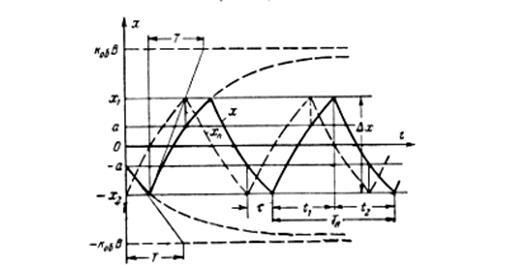
Рис. 1-17. Установившийся процесс в системе с запаздыванием при симметричной статической характеристике двухпозиционного регулятора с зоной неоднозначности в случае объекта с самовыравниванием
Длительности положительного и отрицательного импульсов определяются выражением
 . (1-41)
. (1-41)
Период колебаний
 . (1-42)
. (1-42)
Диапазон колебаний
 . (1-43)
. (1-43)
Колебания регулируемой величины симметричны относительно заданного значения. На рис 1.18 представлен установившийся процесс регулирования при несимметричной статической характеристике двухпозиционного регулятора с зоной неоднозначности.

Рис. 1-18. Установившийся процесс в системе с запаздыванием при несимметричной статической характеристике двухпозиционного регулятора с зоной неоднозначности в случае объекта с самовыравниванием
В этом случае продолжительность положительного импульса равна:
 . (1-44)
. (1-44)
Длительность отрицательного импульса равна:
 . (1-45)
. (1-45)
Период колебаний
 .(1-46)
.(1-46)
Диапазон колебаний
 . (1-47)
. (1-47)
Положительная амплитуда отклонения регулируемой величины
 . (1-48)
. (1-48)
Отрицательная амплитуда
 . (1-49)
. (1-49)
Так как положительная и отрицательная амплитуды колебаний не равны, то среднее значение регулируемой величины отличается от нулевого (см. рис. 1.18) на величину
 . (1-50)
. (1-50)
Постоянную погрешность регулирования можно устранить путем коррекции задания регулятору.
При поступлении на объект постоянного возмущающего воздействия  в законе регулирования появляется дополнительная постоянная погрешность
в законе регулирования появляется дополнительная постоянная погрешность
 (1-51)
(1-51)
Если двухпозиционный регулятор не имеет зоны неоднозначности, то для этого случая можно найти выражения, определяющие процесс регулирования, из формул (1-41) – (1-49), полагая в них а = 0. Постоянная погрешность регулирования (12-50) при этом остается такой же.
Упрощенный метод расчета инерционных систем
с двухпозиционным регулятором
Рассмотрим упрощенный метод расчета инерционных систем с двухпозиционным регулятором
При относительно небольшом диапазоне установившихся колебаний регулируемой величины экспоненциальный процесс регулирования можно заменить линейным
 . (1-52)
. (1-52)
Тангенс угла наклона прямой к оси абсцисс (скорость движения) равен
 . (1-53)
. (1-53)
Если объект не имеет запаздывания, то при симметричной статической характеристике регулятора с зоной неоднозначности, аналогично (1-9) – (1-12), получим выражения, определяющие процесс регулирования
 . (1-54)
. (1-54)
При несимметричной статической характеристике регулятора с зоной неоднозначности, аналогично (1-14) и (1-15), найдем
 . (1-55)
. (1-55)
При наличии запаздывания в системе и симметричной характеристики регулятора с зоной неоднозначности соответственно найдем:
 . (1-56)
. (1-56)
При наличии запаздывания в системе и несимметричной характеристики регулятора с зоной неоднозначности, получим, разделив время, необходимое для прохождения диапазона изменения  на скорость движения, равную производной от закона движения
на скорость движения, равную производной от закона движения  :
:
 . (1-57)
. (1-57)
При расчете процесса регулирования упрощенным методом наибольшая погрешность расчета получается при наличии запаздывания в системе.
Определим погрешность при расчете упрощенным методом диапазона колебаний регулируемой величины при наличии запаздывания в системе. При симметричной статической характеристике регулятора, найдем
или
 . (1-58)
. (1-58)
Относительная погрешность равна
 . (1-59)
. (1-59)
или
 . (1-60)
. (1-60)
При симметричной статической характеристике двухпозиционного регулятора без зоны неоднозначности (а = 0) погрешность расчета (1-60) в процентах определяется выражением
 . (1-61)
. (1-61)
Из выражения (1-58) – (1-61) видно, что с увеличением отношения  величина ошибки регулирования увеличивается. На рис. 1-19 погрешность расчета в процентах (1-61) представлена графически. Как видно из рис. 1-19 погрешность расчета при
величина ошибки регулирования увеличивается. На рис. 1-19 погрешность расчета в процентах (1-61) представлена графически. Как видно из рис. 1-19 погрешность расчета при  в случае симметричной статической характеристики двухпозиционного регулятора без зоны неоднозначности не превышает 10%. При
в случае симметричной статической характеристики двухпозиционного регулятора без зоны неоднозначности не превышает 10%. При  погрешность расчета находится в пределах 5%.
погрешность расчета находится в пределах 5%.

Рис. 1-19. Ошибка расчета диапазона колебаний регулируемой величины объекта с самовыравниванием при линеаризации переходного процесса при симметричной статической характеристике двухпозиционного регулятора без зоны неоднозначности
Рассмотрим несколько примеров определения параметров настройки и расчета систем автоматического регулирования с двухпозиционным регулятором при наличии запаздывания в системе.
Пример 4. В системе автоматического регулирования температуры нагревательной электропечи, принципиальная схема которой представлена на рис. 1-8. Напряжение, снимаемое с автотрансформатора,  В. Напряжение сети
В. Напряжение сети  . Сопротивление нагревательного элемента R = 900 Ом. Заданное значение температуры
. Сопротивление нагревательного элемента R = 900 Ом. Заданное значение температуры  = 472 К (
= 472 К ( ). Теплоемкость печи с = 50,208 кДж/К. Коэффициент теплоотдачи А =0,08333 Дж/(с
). Теплоемкость печи с = 50,208 кДж/К. Коэффициент теплоотдачи А =0,08333 Дж/(с  ).
).
Нагревательная печь в динамическом отношении является инерционным звеном второго порядка, которое приближенно может быть заменено звеном первого порядка с чистым запаздыванием, равным  = 30 с. Номинальное напряжение реле на выходе электронного усилителя
= 30 с. Номинальное напряжение реле на выходе электронного усилителя  .
.
Напряжение срабатывания реле  . Коэффициент возврата реле
. Коэффициент возврата реле  . Коэффициент усиления участка системы автоматического регулирования от объекта до входа ЭУ в абсолютных единицах
. Коэффициент усиления участка системы автоматического регулирования от объекта до входа ЭУ в абсолютных единицах  .
.
Требуется произвести расчет переходного процесса системы в установившемся состоянии. Передаточная функция объекта определяется выражением (1-40).

Определим постоянную времени нагревательной печи
 с
с
В установившемся режиме количество энергии, потребляемой печью, равно количеству энергии, отдаваемой ею в окружающую среду
или

где  – количество тепла, выделяемого нагревательным элементом в единицу времени, Вт;
– количество тепла, выделяемого нагревательным элементом в единицу времени, Вт;
 – коэффициент передачи нагревательной печи в абсолютных единицах, который равен:
– коэффициент передачи нагревательной печи в абсолютных единицах, который равен:
 .
.
При изменении количества тепла, выделяемого нагревательным элементом на  , температура нагревательный печи изменится на
, температура нагревательный печи изменится на  и тепловой баланс печи в установившемся состоянии запишется
и тепловой баланс печи в установившемся состоянии запишется

или
 .
.
В относительных единицах запишем
 .
.
Обозначив в относительных единицах
 ,
,  и
и  .
.
Получим

Таким образом, передаточный коэффициент нагревательной печи, как объекта регулирования, в относительных единицах равен единице.
Количество энергии в единицу времени, необходимое для поддержания заданного значения температуры  , равно:
, равно:
 кВт.
кВт.
Количество энергии в единицу времени, выделяемой нагревательным элементом при включении регулятора:
 кВт.
кВт.
Регулирующее воздействие регулятора при его включении
и выключении
 .
.
Согласно (1-6) находим зону неоднозначности регулятора через  и
и  – напряжения срабатывания и отпускания реле и
– напряжения срабатывания и отпускания реле и  – коэффициента усиления участка системы автоматического регулирования от объекта до входа ЭУ.
– коэффициента усиления участка системы автоматического регулирования от объекта до входа ЭУ.

или в относительных единицах
 .
.
Длительность включения нагревательного элемента определяем по
(1-44).

По выражению (1-45) находим длительность пауз


Период колебаний
 .
.
Согласно (1-47) находим диапазон колебаний регулируемой величины

В абсолютных единицах

Задание регулятору необходимо скорректировать на величину

или в абсолютных единицах
 .
.
Положительная и отрицательная амплитуды колебаний регулируемой величины
 ,
,

или в абсолютных единицах
 ,
,
 .
.
Пример 5. Для системы автоматического регулирования, рассмотренной в примере 4, определить, на сколько уменьшится диапазон колебаний регулируемой величины при замене выходного реле электронного усилителя с коэффициентом возврата  на реле с коэффициентом возврата
на реле с коэффициентом возврата  .
.
Зона неоднозначности регулятора при этом реле равна
 .
.
В относительных единицах
 .
.
Диапазон регулируемой величины
 .
.
В абсолютных единицах
 .
.
Таким образом, замена реле даст уменьшение колебания регулируемой величины на
Пример 6. Произвести расчет переходного процесса в системе автоматического регулирования, рассмотренной в примере 4, приближенным методом и определить погрешность расчета.
Согласно выражению (1-57) определяем диапазон колебания регулируемой величины
 .
.
В абсолютных единицах
 .
.
Погрешность расчета колебаний приближенным методом составляет
Пример 7. В системе автоматического регулирования, рассмотренной в примере 4, необходимо уменьшить диапазон колебаний регулируемой величины до  .
.
Определить коэффициент усиления  электронного усилителя ЭУ двухпозиционного регулятора, обеспечивающий заданный диапазон колебаний регулируемой величины, если коэффициент усиления участка «выход объекта – вход ЭУ» равен
электронного усилителя ЭУ двухпозиционного регулятора, обеспечивающий заданный диапазон колебаний регулируемой величины, если коэффициент усиления участка «выход объекта – вход ЭУ» равен  .
.
Находим допустимый диапазон колебаний регулируемой величины в относительных единицах
 .
.
Из выражения (1-47) находим допустимую зону неоднозначности регулятора

Из выражения (1-6) находим требуемый коэффициент усиления ЭУ, учитывая, что 
 .
.
Таким образом, за счет повышения коэффициента усиления ЭУ уменьшается зона неоднозначности регулятора, в результате чего сокращается диапазон колебаний регулируемой величины. Однако следует заметить, что при наличии запаздывания в системе только за счет увеличения коэффициента усиления регулятора не всегда возможно уменьшить диапазон колебаний регулируемой величины до необходимого значения. Так, в нашем примере даже при 2 а = 0, что теоретически соответствует бесконечно большому значению коэффициента усиления ЭУ, диапазон колебаний остается достаточно большим.

или
 .
.
Если такой диапазон колебаний регулируемой величины для конкретной системы автоматического регулирования является недопустимым, то необходимо применять специальные методы улучшения качества двухпозиционного регулирования.





