Глава 1. ТЕОРЕТИЧЕСКИЙ АНАЛИЗ ТЯГОВО-СКОРОСТНЫХ СВОЙСТВ АВТОМОБИЛЯ
Тягово-скоростными называют совокупность свойств, определяющих возможные по характеристикам двигателя и сцеплению ведущих колес с дорожным покрытием диапазоны изменения скоростей движения автомобиля и его максимальные ускорения разгона.
Сцепление колеса с опорной поверхностью
Максимальное продольное касательное взаимодействие колеса с опорной поверхностью (при отсутствии боковой силы) ограничивается силой сцепления между ними. В качестве оценочного параметра этого взаимодействия используется коэффициент сцепления j, причем для случая продольного касательного взаимодействия этот коэффициент обозначим j х. Его величина определяется из выражения
j х = Rx max / Rz. (16)
Касательное взаимодействие колеса с опорной поверхностью обуслов- ливается такими факторами:
1. Трением между шиной и поверхностью дороги.
2. Сопротивлением сдвигу поверхности дороги.
3. Глубиной внедрения элементов рисунка протектора шины в поверхность дороги.
Первый фактор наиболее существенен для твердых ровных дорожных покрытий, второй и третий – для деформируемых поверхностей дорог. Большое значение имеет также рисунок протектора шины, жесткость его элементов. Интересно, что максимального значения коэффициент сцепления j х достигает при примерно 15-ти процентном проскальзывании шины по поверхности дороги. Это хорошо видно из графика зависимости jх от проскальзывания S t, определяемого соотношением S t = (V т - V д) / V т, в котором V т и V д соответственно обозначают теоретическую и действительную скорость поступательного движения колеса (рис. 11).
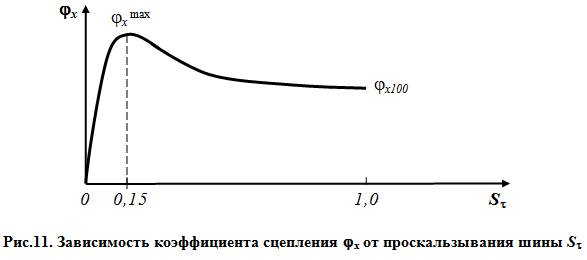
Таблица 1
Значения максимальных коэффициентов сцепления шин
С дорожными поверхностями различных типов
| Тип дорожного покрытия
| j х
|
| Сухой чистый асфальт и бетон
| 0,7 – 0,9
|
| Мокрый асфальт
| 0,45 – 0,7
|
| Мокрый бетон
| 0,65 – 0,8
|
| Грязный асфальт
| 0,25 – 0,45
|
| Булыжник или брусчатка сухие
| 0,4 – 0,6
|
| - «- - «- мокрые
| 0,3 – 0,4
|
| Гравийное покрытие
| 0,5 – 0,65
|
| Грунтовая дорога сухая
| 0,6 – 0,7
|
| - «- увлажненная
| 0,4 – 0,55
|
| - «- сильно мокрая
| 0,15 – 0,3
|
| Песок сухой
| 0,2 – 0,3
|
| - «- влажный
| 0,4 – 0,5
|
| Снег укатанный
| 0,15 – 0,25
|
| Лед
| 0,05 – 0,15
|
В табл. 1 приведены максимальные величины коэффициентов сцепления шин с дорожными покрытиями различных типов. При движении по мокрым дорогам на величину коэффициента продольного сцепления j х сильно влияет степень износа протектора шины. При износе рисунка протектора более чем на 70% коэффициент сцепления таких шин на сухих дорогах снижается на 30-50%, а в условиях мокрых дорог может уменьшиться в два-три раза.
Расчет потерь в трансмиссии
При движении автомобиля происходит передача мощности от коленчатого вала двигателя на ведущие колеса. При этом она одновременно расходуется на разгон вращающихся деталей двигателя и трансмиссии и на потери в трансмиссии, обусловленные механическим трением в зубчатых передачах, трением сальниковых устройств подшипников и сопротивлением качению их роликов (иголок, шариков), гидравлическими потерями на перебалтывание смазочного масла в картерах трансмиссионных узлов.
Соответствующий ситуации мощностной баланс имеет вид
Ре - Р j = Рк + Р тр (24)
или Р к = Ре – Р j – Ртр , (25)
где Р к – мощность, подводимая к ведущим колесам автомобиля; Ре – мощность двигателя, установленного на автомобиле; Р j – мощность, затрачиваемая на разгон вращающихся деталей двигателя и трансмиссии; Р тр – мощность потерь в трансмиссии.
Для учета потерь в трансмиссии удобнее пользоваться понятием коэффициент полезного действия (КПД) трансмиссии hтр:
hтр = Р к / (Р к + Ртр) = Р к / (Ре – Р j). (26)
Тогда
hтр Р к + hтр Р тр = Р к,
откуда Р тр = Р к (1 - hтр) / hтр.
При установившемся движении, когда Р j = 0 и Р к / hтр = Ре, получим
Р тр = Ре (1 - hтр). (27)
Общепринято, что КПД трансмиссии автомобиля (как и любой другой механической трансмиссии) равен произведению КПД ее последовательно расположенных узлов. Для проектных расчетов рекомендуются следующие ориентировочные значения КПД автомобильных трансмиссионных узлов: коробки передач 0,95 ÷ 0,99 (в зависимости от конструкции узла и включенной передачи); раздаточной коробки 0,93 ÷ 0,97 (в зависимости от конструкции узла и использования демультипликатора); колесной передачи 0,96 ÷ 0,98; карданного шарнира 0,99 ÷0,995 (в зависимости от его конструкции и угла передачи); главной передачи 0,92 ÷ 0,97(меньшее значение для двойной главной передачи).
Для более детального определения hтр можно воспользоваться формулой, учитывающей количество зубчатых передач, карданных шарниров и подшипников трансмиссии, через которые передается полная мощность от двигателя на ведущие колеса
hтр = 0,98 к · 0,97 l · (0,99 ÷ 0,995) m · (0,995 ÷ 0,998) n · (0,997 ÷ 0,999) р, (28)
где 0,98 – КПД цилиндрической шестеренчатой пары; к – число цилиндрических шестеренчатых пар, участвующих в передаче полной мощности Ре на ведущие колеса; 0,97 – КПД конической шестеренчатой пары; l – число конических пар, передающих полную мощность Ре на ведущие колеса; (0,99 ÷ 0,995) – КПД карданного шарнира; m – число карданных шарниров, передающих полную мощность Ре ; (0,995 ÷ 0,998) – КПД пары конических подшипников с сальниками; n – число пар конических подшипников, через которые передается полная мощность Ре на ведущие колеса автомобиля; (0,997 ÷ 0,999) – КПД пары шариковых подшипников с сальниками; р – число пар шарикоподшипников, участвующих в передаче полной мощности Ре на ведущие колеса автомобиля.
Формула (28) хорошо подходит для случаев расчетного определения КПД трансмиссии автомобиля с колесной формулой 4х2, в которой отсутствует разделение потока мощности, передаваемого от двигателя на ведущие колеса. В случае трансмиссии полноприводного автомобиля типа 4х4 или 6х6 для повышения точности расчетов можно рекомендовать корректировку КПД узла (hу), передающего часть (D) мощности Ре, перед подстановкой в формулу (28) по предлагаемой авторами монографии формуле:
hу(кор) = (1 - D) + hу D,
где ηу(кор) – откорректированное значение КПД узла, передающего часть мощности; Δ – относительная доля передаваемой узлом мощности.
В общем случае точное расчетное определение КПД трансмиссии с разделениями потоков мощности любого типа можно провести из подробного анализа формулы (27). Преобразованиями этой формулы получаем
n
ηтр = (Ре – Ртр) /Ре = 1 – ∑ Р пу. i /Ре, (29)
i =1
где Р пу. i – потери мощности в i -ом узле трансмиссии;
n
∑ Р пу. i – cуммарные потери мощности в n узлах трансмиссии.
i =1
Таблица 2
Значения коэффициента сопротивления качению f колес легковых автомобилей
для различных дорожных покрытий
| Тип дорожного покрытия
| f
|
| Асфальт или цементобетон
| 0,007 – 0,015
|
| Гравий
| 0,02 – 0,025
|
| Булыжное покрытие
| 0,025 – 0,03
|
| Сухой грунт
| 0,025 – 0,03
|
| Грунтовая дорога после дождя
| 0,05 – 0,15
|
| Сухой песок
| 0,1 – 0,3
|
| Влажный песок
| 0,06 – 0,15
|
| Обледенелая дорога, лед
| 0,015 – 0,03
|
| Укатанная снежная дорога
| 0,03 – 0,05
|
| Рыхлый снег
| 0,1 – 0,3
|
Как правило, коэффициент f с ростом скорости движения также увеличивается, при этом особенно заметно это увеличение происходит после достижения скорости 60-80 км/ч. Для учета этого явления в расчетах тяговой динамики автомобиля применяют различные эмпирические зависимости. Для шин легковых автомобилей часто используют соотношение типа
f = f о (1 + А1 Va 2), (47)
где f о – коэффициент сопротивления качению при малых скоростях движения (см. табл. 2); А1 = 0,0002 ¸ 0,0006 с 2 /м 2 - коэффициент, учитывающий влияние cкорости движения на изменение величины f и в основном зависящий от конструкции шины [20]; Va – cкорость движения автомобиля, м/ c.
Для шин грузовых автомобилей более применимо выражение [20]
f = f о + А2 Va, (48)
где f о = 0,008 ¸ 0,02; А2 = 0,00008 ¸ 0,0001 с/м; в случае грузовых автомобилей повышенной проходимости f о = 0,03 ¸ 0,06; А2 = 0,0002 ¸ 0,0003 с/м.
Сила сопротивления движению на подъем. Это составляющая F a cилы
тяжести автомобиля Ga, направленная параллельно опорной поверхности против движения автомобиля и приложенная в центре его масс на высоте hg (рис. 14). Из рис. 14 видно, что
F a = Ga sin a. (49)

Рис.14. Схема сил, действующих на автомобиль при движении
Рис.21. Силы и моменты, действующие на автомобиль-тягач
при прямолинейном ускоренном движении на подъем
Всю совокупность силовых факторов в рассматриваемой ситуации можно разделить на такие основные группы:
1) движущие автомобиль;
2) создающие сопротивление движению;
3) нормальные к направлению движения (перпендикулярные вектору V х).
Первую группу силовых факторов представляет окружная сила на ведущих колесах, условно реализованная на рис.21 в виде суммарной продольной реакции дороги S Rx 2 на колеса задней оси.
Вторую группу представляют: Fwx – cила сопротивления воздуха; F a - продольная составляющая силы тяжести автомобиля; Fjx – cила сопротивления поступательному разгону автомобиля; F c x – продольная сила на сцепном устройстве; S Rx 1 – суммарная продольная реакция дороги на колеса передней ведомой оси; S Tf 1 и S Т f 2 – cуммарные моменты сопротивления качению колес соответственно передней и задней осей; S Т j 1 и S Т j 2 – суммарные инерционные моменты колес передней и задней осей.
Третью группу представляют такие вертикальные силы: S Rz 1 и S Rz 2 – суммарные вертикальные реакции дороги на колеса соответственно передней и задней осей; G н = Ga сosa- нормальная составляющая силы тяжести автомобиля; Fwz – нормальная к плоскости дороги составляющая полной аэродинамической силы; F c z – вертикальная нагрузка на сцепном устройстве.
Нормальные реакции опорной поверхности. Для нахождения нормаль- ных реакций дороги на колеса передней (S R z1) и задней (S R z2)осей используются уравнения моментов относительно опорных точек О 1 и О 2 (см. рис. 21). Считаем, что автомобиль не теряет контакта с дорогой, поэтому суммы моментов относительно указанных опорных точек равны нулю (положительными приняты моменты, действующие по часовой стрелке):
S T о 2 = 0;
S Rz 1 l – G н b + Fwz bw + S Tf 1 + S Tf 2 + S Tj 1 + S Tj 2 + (F a + Fjx) hg + Fwxh w + F c x h c + F c z b c= 0;
S Т о 1 = 0;
- S Rz 2 l + G н а – Fwzaw + S Т f 1 + S Tf 2 + S Tj 1 + S Tj 2 +(F a+ Fjx) hg + Fwxhw + F c x h c+ F c z (l + b c) = 0.
Отсюда после небольших упрощений (подставим S Т f 1 + S Tf 2 = S Т f и S Т j 1 + S Tj 2 = = S Tj) получим величины нормальных осевых реакций
S Rz 1 = [ G н b – Fwz bw - S Tf - S Tj – (F a + Fjx) hg – Fwx hw - F c x h c – F c z b c ] / l
(66)
S Rz 2 = [ G н а – Fwz aw + S Tf + S Tj +(F a+ Fj) hg + Fwx hw + F c x h c + F c z (l + b c)] / l
(67) Частные случаи:
1. Одиночный автомобиль движется в гору с постоянной скоростью. (Cилой Fwz ввиду ее малости при скоростях движения, меньших 100 км/ч, пренебрегаем).
S Rz 1 = (G н b - S Т f - F a hg – Fwx hw) / l =
= (Ga сosa b – Ga сosa f r д – Ga sina hg – W в Va 2 hw) / l @
@ [ Ga (b – f r д - a hg) – W в Va 2 hw ] / l.
По аналогии (если a < 7-8о)
S Rz 2 @ [ Ga (a + f r д + a hg) + W в Va 2 hw ] / l.
2. Одиночный автомобиль на горизонтальной площадке (т.е. статические нормальные реакции на колеса)
S Rz1 cт = Ga b / l = G1;
S Rz2 ст = Ga a / l = G2 .
Вводится понятие коэффициент изменения нормальных реакций mR 1 и mR 2
mR1 = S Rz1 / S Rz1 ст ; mR2 = S Rz2 / S Rz2 ст.
На подъеме и при разгоне mR 1 < 1; mR 2 > 1.
Тяговый баланс автомобиля. Это уравнение, показывающее распределение тяговой силы по видам сопротивления движению и являющееся для представленного на рис. 21 общего случая движения автомобиля уравнением равновесия параллельных опорной поверхности сил. Для суммы всех сил, направленных по оси Х, должно выполняться условие S Fx = 0, т.е.
S Rx 2 - S Rx 1 - F a - Fwx - Fjx - F c x = 0. (68)
Рис. 26. График максимальных ускорений автомобиля КамАЗ-5510
Рис. 28. График пути разгона автомобиля КамАЗ-5510
Глава 1. ТЕОРЕТИЧЕСКИЙ АНАЛИЗ ТЯГОВО-СКОРОСТНЫХ СВОЙСТВ АВТОМОБИЛЯ
Тягово-скоростными называют совокупность свойств, определяющих возможные по характеристикам двигателя и сцеплению ведущих колес с дорожным покрытием диапазоны изменения скоростей движения автомобиля и его максимальные ускорения разгона.






