функции положения (рис. 143, а) и самой функции положения (рис.143, б)
Значение первой производной от функции положения

и самой функции

Построим план скоростей для j -го положения по равенству

где  = S '2jω1— скорость точки В 2 штанги, направлена параллельно линии AYj ;
= S '2jω1— скорость точки В 2 штанги, направлена параллельно линии AYj ;
в повернутом плане - перпендикулярно ей);
 = lAB jω1—скорость точки В 1 кулачка, направлена перпендикулярно линиb ABj (в повернутом плане параллельно ABj);
= lAB jω1—скорость точки В 1 кулачка, направлена перпендикулярно линиb ABj (в повернутом плане параллельно ABj);
 — скорость скольжения точки В2 по точке В1 направлена параллельно тарелке х j х j (в повернутом плане — перпендикулярно х j х j).
— скорость скольжения точки В2 по точке В1 направлена параллельно тарелке х j х j (в повернутом плане — перпендикулярно х j х j).
Повернутый план скоростей построен непосредственно на схеме механизма в масштабе радиуса (рис. 143, в), поэтому pb 1 =АВ j. (полюс плана р совмещен с центром шарнира А). Отрезок pb 1соответствует скорости υB 1, pb 2 — скорости υ B 2, b 2 b 1 —скорости υB2B1, а отрезок K j B j = pb 2. Расстояние lTj от линии AY j. до точки касания В j тарелки с профилем, взятое в натуральную величину, будет
Вычислим длину
но
(рис. 143, а), а
поэтому
откуда расстояние oтоси AY j до точки контакта тарелки с профилем кулачка
 (137)
(137)
Очевидно, что радиус тарелки следует назначить немногим более (во избежание работы тарелки ее углом) максимального значения первой производной от функции положения штанги:
 (137 a)
(137 a)
5°. Формулы для подсчета полярных координат точек профиля кулачка (рассматриваются только кулачки типа I ,а с острием и тарелкой на штанге) (рис. 142, в и 143, в).
Начало координат взято в центре шарнира А, ось отсчета — AY 1.
Для кулачкового механизма с острием на штанге (рис. 142, в) полярные координаты: радиус-вектор
 (138)
(138)
S 2 находят по графику S2 = S2(φ1) (рис. 142,6), полярный угол (профильный угол)
 (138 a)
(138 a)
Для кулачкового механизма с тарелкой на штанге (рис. 143, в) полярные координаты: радиус-вектор
 (139)
(139)
S 2 j находят по графику S 2 ≠ S 2 (φ1) (рис. 143, б), a S '2 j — по графику S '2 = S '2 (φ1) (рис. 143, а), полярный угол (профильный угол)
 (139 a)
(139 a)
угол δj определяют из формулы
 (139 б)
(139 б)
6°. Примеры проектирования кулачковых механизмов.
Пример 1. Требуется спроектировать кулачковый механизм, у которого штанга движется поступательно. Осевая линия штанги проходит через центр вращения кулачка. На конце штанги имеется круглый ролик.
Начальные данные:
а) угловая скорость кулачка ω1= 100 сек-1 вторая производная от функции положения штанги S "2 = ± K (на фазе удаления) и S "2 =± К (на фазе приближения); максимальный ход штанги S2max= 10 мм;фазовые углы: удаления φу = 120°, верхней остановки φво = 30°, приближения φп = 120°, нижней остановки φно = 90°
б) радиус ролика R poл— 10 мм, диаметр вала кулачка d в = 25 мм; кулачок отковывается заодно с валом; минимальное возвышение профиля кулачка над поверхностью вала ∆ = 1,5 мм.
Профиль кулачка должен быть построен по 9 точкам для каждой фазы его угла поворота.
Решение. 1. Определяем функцию положения штанги S2 = S2(φ1) (графическое решение). На рис. 144, а дан график второй производной от функции положения штанги: S "2 = S "2 (φ1). (Ввиду сим-
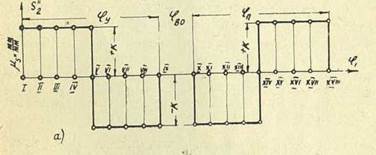
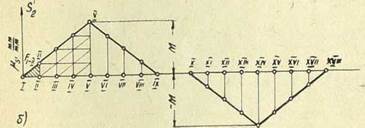
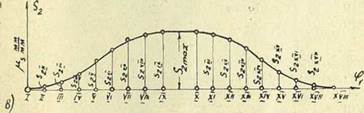
Рис. 144. Закон движения штанги, заданный второй производной
от функции положения штанги:
а — график второй производной; б — график первой производной;
в — функция положения штанги.
метричности цикла движения штанги функцию положения S2 = S2(φ1) находим только для фазы удаления.)
График первой производной, очевидно, имеет вид, показанный на рис. 144,6, поэтому
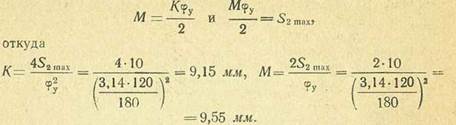
График S '2 =S2(φ1) (рис. 144,6) делим на треугольники так, как это показано на рисунке. Площадь треугольника I—II—II укладывается в площади треугольника I—V—IX 32 раза. Следовательно, «цена» площади F 1-II соответствует 1/32 максимального хода штанги S2.max(вся площадь треугольника I—V—IX отвечает значению S2max). Вычисление ординат графика S2(φ1) сведется к подсчету их по формуле
Гдеnj - число площадок F 1-II,заключенных между началом координат графика S '2 (φ1) и j положением кулачка.
Результаты подсчета сведены в таблицу.
| Номера
положений
| S2.max ММ
| п
| S2 мм
|
| I
| 10/32
| 0
| 0,0
|
| II
| То же
| 1
| 10/32 = 0,7
|
| III
| *
| 4
| 40/32= 1,25
|
| IV
| *
| 9
| 90/32 = 2,8
|
| V
| *
| 16
| 100/32 = 5,0
|
| VI
| *
| 23
| 230/32 = 7,2
|
| VII
|
| 28
| 280/32 = 8,75
|
| VIII
| *
| 31
| 310/32 = 9,3
|
| IX
| *
| 32
| 320/32 = 10,0
|
По данным четвертой графы таблицы построен график S2(φ1) (рис. 144, в).
2. Определяем минимальный радиус кулачка:

3. Строим профиль кулачка (рис. 145). Выбираем масштаб чертежа; µl= 0,4 мм/мм (желательно, чтобы масштабы графиков S "2 (φ1),S'2(φ1) и S2(φ1) были бы равны µl, т. е.
µS" =µS’ = µS= µl).
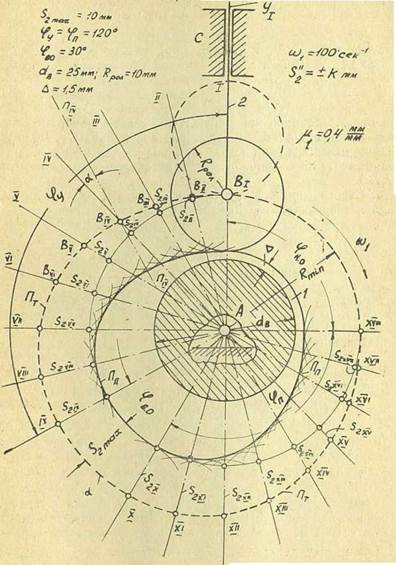
Рис. 145. Синтез кулачкового механизма типа 1-а с роликом на
Штанге.
Отмечаем центр вращения кулачка А и проводим окружность радиуса Rmin. Вычерчиваем первое положение механизма (центр шарнира — центр ролика В 1 должен лежать на окружности минимального радиуса).
Обращаем движение, т. е. сообщаем всему механизму угловую скорость, равную ω1 По направлению угловой скорости обращенного движения откладываем фазовые углы φу, φво,φп, φн0 Делим фазовые углы φу и φп на 8 равных частей каждый (лучи A I, А II, A III, А IV, А V... От окружности радиуса Rmin вдоль лучей А II, A III и т. д. откладываем соответствующие перемещения штанги, взятые по графику S2(φ1)или из таблицы.
Точки В, В II,В III BIV... указывают положения центра ролика при движении штанги относительно кулачка. Соединив точки В I, В II,В III,... плавной кривой, получим искомый теоретический профиль кулачка (ПТПТ). Взяв в раствор циркуля размер радиуса ролика, построим ряд последовательных положений ролика. Огибающая этих положений будет практическим профилем кулачка ПППП).
4. Строим нормаль к профилю кулачка в положении IV. Нормаль к теоретическому профилю составляет со скоростью центра ролика угол давления а IV. Тангенс этого угла
найдем по формуле

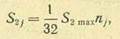
Пример 2. Требуется спроектировать кулачковый механизм, у которого штанга движется поступательно. На конце штанги имеется плоская тарелка (рис. 146).
Начальные данные:
а) угловая скорость кулачка ω1 = 100 сек-1; вторая производная от функции положения штанги: S"2 = ± К (на фазе удаления) и S"2 =± К (на фазе приближения); максимальный ход штанги S2max= 10 мм; фазовые углы: удаления φу= 120°, верхней остановки φво =30°, приближения φп = 120°, нижней остановки φно= 90°;
б) диаметр вала dB = 25 мм; кулачок отковывается заодно с валом; минимальное возвышение профиля кулачка над поверхностью вала ∆ = 1,5 мм. Профиль кулачка должен быть построен по 9 точкам для каждой фазы его угла поворота.
Решение. 1) Определяем функции положения штанги S2(φ1) (графическое решение). Законы движения кулачка и штанги идентичны с такими же законами, которые рассмотрены в примере 1 (см. рис. 144, а, б, в).

3) Строим профиль кулачка (рис. 146). Выбираем масштаб чертежа: µl = 0,4 мм/мм. Отмечаем центр вращения кулачка А и
Рис. 146. Синтез кулачкового механизма типа 1-а с тарелкой
На штанге.
проводим окружность минимального радиуса Rm in.. Вычерчиваем первое положение механизма. Тарелка х1х1 должна касаться точкою В1 окружности минимального радиуса.
Обращаем движение. По направлению угловой скорости обращенного движения откладываем фазовые углы: φу, φв0, φп, φн0. Делим фазовые углы φу и φпна 8 равных частей каждый (лучи A I, А II, А III,.. От окружности радиуса Rmin, вдоль лучей А II, А III, A IV,..., откладываем соответствующие перемещения штанги, взятые по графику S2(φ1) или из таблицы примера 1.
Точки В I, В II, В III,..указывают положения тарелки при движении штанги относительно кулачка. Через эти точки проводим положения тарелки (линии х I х I , х II х II, х III х III,...,).
Огибающая ко всем положениям тарелки и будет профилем кулачка ( ПП ).
4. В этом механизме нормаль к профилю будет перпендикуляр к тарелке в месте касания ее с профилем кулачка. Точка касания профиля кулачка с тарелкой отстоит от осевой линии штанги, проходящей через центр вращения кулачка, на величину первой производной от функции положения, найденной для данного положения. Поэтому размер радиуса тарелки должен быть больше максимального значения первой производной.
Пример 3. Требуется спроектировать кулачковый механизм, у которого штанга движется возвратно-вращательно. На конце штанги имеется круглый ролик (рис. 147).
Начальные данные:
а) угловая скорость кулачка ω1= 100 сект-1; функция положения штанги задана графиком ψ0= ψ0(φ1) (рис. 147, а); углы поворота штанги для последовательных положений механизма:
| I, XVIII
II, XVII
III, XVI
IV, XV
V, XIV
VI, XIII
VII, XII
VIII,XI
IX, X
| 0
1
4
9
16
23
28
31
32
|
Фазовые углы: φу = 120°, φво = 30°, φп = 120°, φно=90°; максимальный угол поворота (ход) штанги ψ2max= 32°;
б) радиус ролика Rрол = 12 мм, диаметр вала кулачка dB = 80 мм, кулачок отковывается заодно с валом^ минимальное возвышение профиля кулачка над поверхностью вала ∆ = 4 мм, расстояние между центрами вращения кулачка и штанги