Механическое удерживание земляных масс: Механическое удерживание земляных масс на склоне обеспечивают контрфорсными сооружениями различных конструкций...

Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
Механическое удерживание земляных масс: Механическое удерживание земляных масс на склоне обеспечивают контрфорсными сооружениями различных конструкций...
Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
Топ:
Когда производится ограждение поезда, остановившегося на перегоне: Во всех случаях немедленно должно быть ограждено место препятствия для движения поездов на смежном пути двухпутного...
Основы обеспечения единства измерений: Обеспечение единства измерений - деятельность метрологических служб, направленная на достижение...
Интересное:
Искусственное повышение поверхности территории: Варианты искусственного повышения поверхности территории необходимо выбирать на основе анализа следующих характеристик защищаемой территории...
Подходы к решению темы фильма: Существует три основных типа исторического фильма, имеющих между собой много общего...
Лечение прогрессирующих форм рака: Одним из наиболее важных достижений экспериментальной химиотерапии опухолей, начатой в 60-х и реализованной в 70-х годах, является...
Дисциплины:
|
из
5.00
|
Заказать работу |
Содержание книги
Поиск на нашем сайте
|
|
|
|
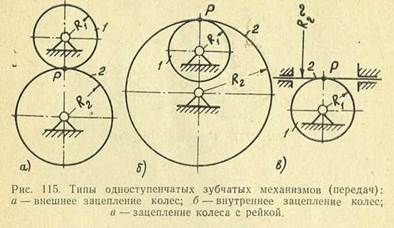
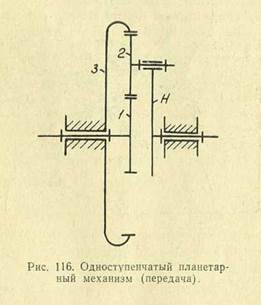
1°. Класс этих механизмов обширен. Укажем некоторые типы плоских механизмов: а) одноступенчатые с постоянным передаточным отношением (рис. 115), планетарный редуктор типа Джемса (рис. 116); одноступенчатые с переменным передаточным отношением— некруглые колеса (рис. 117); многоступенчатые. В нашем курсе ограничимся только задачей проектирования механизмов типа рис. 115, а.
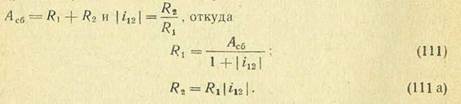
2°. Общая теория зацепления. Эту теорию рассмотрим на примере внешнего зубчатого зацепления с постоянным передаточным отношением i 12= const. Пусть задано межцентровое расстояние Ас6 (рис. 118) и постоянное передаточное отношение i 12. Тогда
Окружности радиусов R 1 и R 2, как известно, называются начальными (они являются центроидами в относительном движении колес), а точка их касания Р12 будет полюсом мгновенного вращения в относительном движении колес 1 и 2.

Для осуществления заданного передаточного отношения свяжем с колесом 1 произвольно выбранный профиль П1П1 проходящий в данный момент через полюс зацепления P 12. На колесе 2 найдем такой профиль П 2 П 2, который удовлетворял бы следующему условию: где бы ни соприкасались профили П1П1 и П 2 П 2, нормаль к ним, проведенная в точке их касания, должна проходить через полюс зацепления Р12. Это условие вытекает из известного закона Виллиса: «Линия действия (в нашем случае нормаль) делит линию центров на части, отношение которых обратно пропорционально отношению угловых скоростей».
Построение сопряженного профиля П 2 П 2 проведем методом Рело. Задан произвольный профиль П1П1 на колесе 1, который в данный момент проходит через полюс зацепления Р 12. Очевидно, что одна точка искомого профиля П 2 П 2 уже известна, она совпадает с точкой Р 12, так как нормаль к профилям проходит через полюс зацепления. Построим еще одну точку искомого профиля П 2 П 2. Отметим на профиле П1П1 точку а1. Проведем через точку а1 нормаль n 1 n 1к профилю П1П1. Эта нормаль п1п1 не проходит через полюс зацепления, поэтому сейчас (в этот момент) мы не можем допустить касания заданного профиля П1П1 с искомым П 2 П 2. Нормаль п1п1 пересекает начальную окружность колеса 1 в точке а 1. Когда вследствие вращения колес точка a 1 и соответствующая ей на колесе 2 точка а 2 (лежащая на равном дуговом расстоянии от полюса Р 12 P 12 a 1 = P 12 a 2) придут в полюс Р 12, тогда можно и должно допустить зацепление заданного профиля П 1 П 1 с искомым П 2 П 2. Точку зацепления А 12 находят так: из точки О1 проводим окружность радиуса O 1 a 1 и засекаем ее из точки Р 12 дугой окружности радиуса P 12 A 12 = а1а1. Точек типа А 12 будет бесчисленное множество и они образуют линию зацепления (л. з.) — геометрическое место точек, принадлежащих неподвижной плоскости, где будет происходить зацепление сопряженных профилей П1П1 и П 2 П 2.
Теперь разыщем на искомом профиле П 2 П 2 точку а 2, которая встретится с точкой а1 на л. з. в точке А 12. Для этого из точки O 2 проведем окружность радиуса O 2 A 12 и из точки а 2 засечем ее дугой окружности радиуса a 2 a 2 = P 12 A 12 -
Аналогичным построением можно получить сколь угодно большое число точек искомого сопряженного профиля П 2 П 2.
Рассмотренный метод построения сопряженных профилей можно применить для внутреннего зацепления зубчатых колес, для зацепления колеса с рейкой и для некоторых колес, у которых центроиды в относительном движении не будут окружностями и передаточное отношение — непостоянное число
Особенности зацепления сопряженных профилей следующие,
а) Практическая или рабочая часть л. з. (рис. 119, а). Сопряженные профили П 1 и П 2 построены, известна их л. з. Сопряженные профили в зубчатых колесах ограничены по высоте окружностями головок Rn и R 12, которые пересекаются с л. з. в точках А и В. Дуга А В называется рабочей частью линии зацепления. Очевидно, что вершина зубца П 2— точка а2 зацепится с профилем П 1 в точке А и за этой точкой зацепления уже не будет. Аналогично, точка b 1— вершина зубца П 1 придет в зацепление с профилем П 2 в точке В и за этой точкой (b 1 ) зацепления тоже не будет.
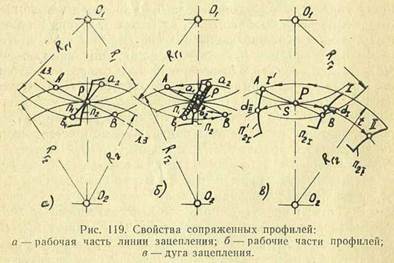
б) Рабочие части профилей (рис. 119,6). Вследствие ограниченности зубцов по высоте не все точки профилей П 1 и П 2 будут использованы для целей зацепления. В самом деле, вместе с конечной точкой a 2 (вершимой головки) зубца П 2 на л. з. придет точка а{ зубца П 1. За этой точкой (считая по направлению к центру колеса 1) профиль П 1 не будет зацепляться с профилем П 2. Для профиля П 1 вершина его головки — точка b 1 придет в зацепление в точке В линии зацепления с точкой b 2 профиля П 2. За точкой b 2 (считая по направлению к центру колеса 2) профиль П 2 работать не будет.
Дуги а1 b 1 и а2 b 2 называются рабочими частями профилей П 1 и П 2.
в) Непрерывность зацепления и степень плавности (степень перекрытия) (рис. 119, в).
Для непрерывного вращения зубчатых колес надо, чтобы после выхода из зацепления одной пары профилей ей на смену пришла в зацепление следующая пара. Для этого необходимо удовлетворить условию: дуга зацепления S должна быть больше шага зацепления t. Дугу зацепления находят так: располагают профиль на каком-нибудь колесе, например 2, проходящем через точку В линии зацепления— начало зацепления профиля П21 с профилем П 1 (этот профиль на чертеже не показан), затем перемещают его в положение, когда он пересечет точку А линии, зацепления — конец зацепления профиля П'21 с профилем П 1. Пересечение профиля П21 с начальной окружностью в точках и d 1 и d 2 определит дугу зацепления S.
Дугой зацепления называется дуга, которая стягивает центральный угол, на который повернется колесо, пока одна пара профилей будет находиться в зацеплении.
Шагом зацепления t будет дуговое расстояние, измеряемое по любой окружности, от одного профиля (П2 I) додругого (П2 II)- При сравнении дуги зацепления с шагом обе дуги следует измерять но одной и той же окружности.
Степенью плавности ε (перекрытия) называется отношение дуги зацепления S к шагу t, это отношение должно быть больше единицы:
|
|

3°. Эвольвентное зацепление. В Советском Союзе изготовляется в день несколько миллионов штук зубчатых колес, поэтому применять произвольно выбранные профили не допустимо, так как, помимо других соображении, придется для каждой пары профилей изготовлять своп режущий инструмент. В практике наибольшее применение получили профили, образованные эвольвентами окружностей.
Эвольвентой окружности называется траектория точки М0 прямой N 0 N 0 (рис. 120), катящейся без скольжения по окружности радиуса R 0. Эта окружность называется основной, а прямая N 0 N 0— производящей прямой.
Построение эвольвенты (рис. 120, а). Прямая N 0 N 0 касается основной окружности в точке М 0. Построим эвольвенту, которая будет описана точкой М 0 при перекатывании прямой N 0 N 0 по направлению часовой стрелки. На прямой N 0 N 0 отложим равные отрезки М 0— 1, 1 — 2, 2—3 и т. д., а на основной окружности — равные дуги: M 0 —1' = M 0 —1, 1' — 2'= 1—2, 2' — 3' = 2—3 и т. д. При перекатывании прямой N 0 N 0 по окружности радиуса R о точки 1 и 1', 2 и 2', 3 и 3' п т. д. будут совпадать, а производящая прямая займет положения: 1' — N 1, 2' — N 2, 3' — N 3 и т. д. От точек 1', 2', 3' и т. д. вдоль линий 1' — N 1, 2' — N 2, 3' — N 3 и т. д. отложим соответственно отрезки: 1' — М1 = 1 — М0, 2' — М2 = 2 — М0, 3' — M 3 = 3 — М0 и т. д. Соединив точки М0, М1, М2,.., получим эвольвенту Эм.
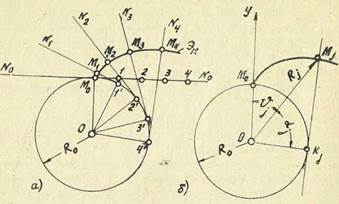
Рис. 120. Эвольвента окружности:
а — построение; б — полярные координаты.
Основные свойства и уравнения эвольвенты (рис. 120,б).
а) Эвольвента — односторонне ограниченная спираль, она начинается на основной окружности в точке М0.
б) Нормалью к эвольвенте в точке М j ее будет касательная М j Kj, проведенная к основной окружности.
в) Отрезок касательной MjKj является радиусом кривизны р j эвольвенты в точке М j ее.
г) Угол α j, заключенный между текущим радиусом-вектором Rj и перпендикуляром OKj к нормали, опущенным из центра О основной окружности, называется углом давления, Из рисункавидно, что
|
|
|
|
 откуда
откуда  (113)
(113)
д) Уравнения эвольвенты в полярных координатах. Начало координат совпадает с центром основной окружности, а ось отсчета Оу проходит через начало эвольвенты М0. Радиус-вектор
 (114)
(114)
Полярный угол (эвольвентнаяфункция или инволюта угла давления — inv aj)
 (114 а)
(114 а)
Этот угол обычно находится по специальным таблицам. Из равенств (113), (114) и (114 а) видно, что эвольвента окружности вполне определяется единственным параметром:
Радиусом основной окружности.
ЛЕКЦИЯ ПЯТНАДЦАТАЯ
(Продолжение четырнадцатой лекции)
4°. Построение эвольвентных профилей. Свойства эвольвентного зацепления.
Рассмотрим построение эвольвентных профилей для внешнего, внутреннего зацеплений и зацепления колеса с рейкой. Для первых двух типов зацеплений будем считать, что задано: межцентровое расстояние Асб и передаточное отношение i 12.
а) Внешнее зацепление (рис. 121, а). Определяем радиусы начальных окружностей по формулам (111) и (111а):
|
|
Строим эти окружности с центрами в точках О 1 и О 2 и через точку Р их касания проводим касательную ττ. Под углом зацепления (или сборки)— а 3 (а сб) к касательной ττ проводим линию производящую эвольвенту — линию NN. Из центров начальных окружностей О 1 и О 2опускаем на линию NN перпендикуляры О 1 К 1 и О 2 К 2, проводим основные окружности, касающиеся линии NN (радиусы этих окружностей R 0 1 = О 1 К 1и R 0 2 = О 2 К 2 ). Перекатыванием прямой NN по соответствующим основным окружностям вычерчиваем эвольвенты Э 1 и Э 2, которые будут сопряженными профилями П 1 и П2 зубчатых колес 1 и 2. Из чертежа видно, что радиусы основных и начальных окружностей связаны равенствами:
|
|

Если на колесах будет по z 1и z 2 зубцов, то шаг зацепления по начальной окружности
|
|
откуда
|
|
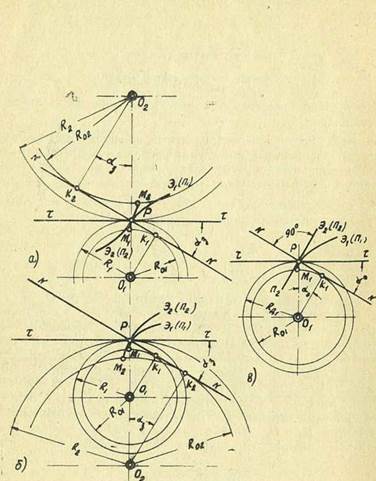
Рис. 121. Построение эвольвентных профилей зубчатых колес:
а—внешнего зацепления; б — внутреннего зацепления;
в — зацепления колеса с рейкой
Отношение шага t к π называется модулем т нач:

| (116) |
поэтому

| (117) (117 а) |
Для каждой окружности существует свой модуль и только для так называемой делительной окружности (о ней речь пойдет после) его значение стандартизировано (ГОСТ 9561—63); он будет нами обозначаться буквой т без всякого индекса.
б) Внутреннее зацепление (рис. 121,6). Радиусы начальных окружностей:

| (118) (118 а) |
Строим эти окружности с центрами в точках О 1 и О 2. Через точку Р их касания проводим касательную ττ. Под углом зацепления (сборки) а3 = асб к линии ττ через точку Р проводим прямую NN — производящую эвольвенты. Вычерчиваем основные окружности радиусов: R 0 1 = О 1 К 1и R 0 2 = О 2 К 2. Перекатыванием прямой NN по основным окружностям точкою Р вычертим эвольвенты Э 1 и Э 2, которые будут сопряженными профилями П 1 и П2 зубцов на колесах 1 и 2. Для этого зацепления справедливы формулы
(115) — (118).
в) Зацепление колеса с зубчатой рейкой (рис. 121, в). В этом зацеплении начальная окружность на рейке обращается в прямую ττ, касающуюся начальной окружности колеса.
При зацеплении колеса с рейкой начальная окружность колеса называется делительной. Ее радиус R Д1 вычисляется с помощью стандартного модуля m:
 (119) (119)
|
Проводим окружность радиуса R Д1 с центром в точке О 1. К этой окружности проводим прямую ττ — начальную прямую рейки. Через точку Р касания делительной окружности колеса с начальной прямой рейки под углом зацепления а о (этот угол для зацепления колеса с рейкой обычно выбирается равным 20°) прочерчиваем линию NN — производящую эвольвенты. Радиус основной окружности на колесе
|
|
Перекатыванием прямой NN по основной окружности колеса получаем эвольвенту Э 1— профиль П 1, на колесе. Профилем на рейке будет прямая П2П2, перпендикулярная линии NN.
Из чертежа видно, что радиус основной окружности

| (120) |
По формулам (119) и (120) всегда находят радиусы делительных и основных окружностей для зубчатых колес, находящихся в любом зацеплении.
|
|
|
Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...

Типы сооружений для обработки осадков: Септиками называются сооружения, в которых одновременно происходят осветление сточной жидкости...

Археология об основании Рима: Новые раскопки проясняют и такой острый дискуссионный вопрос, как дата самого возникновения Рима...

Своеобразие русской архитектуры: Основной материал – дерево – быстрота постройки, но недолговечность и необходимость деления...
© cyberpedia.su 2017-2026 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!