1°. Инерционная нагрузка одного звена является нагрузкой распределенной, и при расчете звеньев на прочность об этом никогда не следует забывать. Если решается задача об определении реакций в кинематических парах механизма, то ее обычно заменяют экв ивалентной сосредоточенной.
Для одного звена эта нагрузка сводится к силе инерции
 (95)
(95)
где т — масса звена; as —ускорение центра тяжести звена, (эта сила приложена в центре тяжести звена и направлена противоположно ускорению центра тяжести звена) и моменту от пары сил инерции или, иначе, инерционному моменту:
 (95 а)
(95 а)
здесь Is — центральный момент инерции звена;
ε —угловое ускорение его.
Этот момент приложен в плоскости движения звена и направлен против углового ускорения его.
Пример. Дан кривошипно-ползуниый (шатунный) механизм (рис. 101, а). Ведущее звено— АВ, положение его определяется углом φ1. Известны угловая скорость ω1 и угловое ускорение ε1 этого звена. Размеры звеньев и положения центров тяжести S их также известны. Определены массы т звеньев и их центральные моменты инерции I s. Требуется найти инерционную нагрузку для каждого звена механизма.
Решение. 1) Строим схему механизма (рис. 101, a).
2) Строим план скоростей механизма (рис. 101,6) по уравнению

3)Строим план ускорений механизма (рис. 101, в) по уравнению

4) Находим по плану ускорений ускорения центров тяжести всех звеньев механизма, а также их угловые ускорения:
для кривошипа: а S1 = 0, так как центр тяжести совпадает с центром шарнира А, ε1 задано;
для шатуна:  (µ а – масштаб плана ускорений);
(µ а – масштаб плана ускорений);
для ползуна: а S3 = (πC)µ a (все точки ползуна имеют одинаковые ускорения), ε3 = 0, так как ползун движется поступательно.
5) Вычисляем модули инерционных нагрузок:
для кривошипа: | P H1 | = 0, |MH1 | = I Slε1;
для шатуна: | РH2| = m2aS2, | MH2 | = I S 2 ε 2;
для ползуна: | РH3 | == т3аC.
6) Прикладываем вычисленную нагрузку к соответствующим звеньям механизма (рис. 101, г).
2°. Уравновешивание инерционной нагрузки сводится к подбору таких масс звеньев механизма и к такому их расположению, чтобы равнодействующая всех инерционных усилий равнялась бы нулю. В этом случае, если дело касается одного звена, в его кинематических парах реакций от этой нагрузки не возникает, и если это касается всего механизма в целом, то не возникнут реакции в кинематических парах, элементы которых связаны со стойкой.
Задачей об уравновешивании инерционной нагрузки приходится заниматься потому, что в современных машинах угловые скорости их ведущих звеньев достигают больших величин (до 100000 об/мин и более). Известно, что ускорения отдельных точек звеньев механизма пропорциональны квадрату угловой скорости ведущего звена и, следовательно, силы и инерционные моменты оказываются очень большими и часто превышают ту нагрузку, на преодоление которой использован механизм.
Практически задача об уравновешивании распадается на две: 1) уравновешивание инерционных усилий отдельных звеньев и, в частности, уравновешивание вращающихся звеньев (балансировка роторов) и 2) уравновешивание механизма па фундаменте (раме).
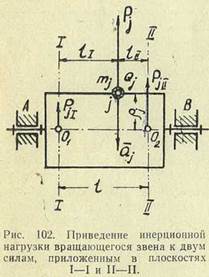
3°. Вращающееся звено (ротор) всегда можно уравновесить двумя противовесами, расположенными в двух произвольно выбранных плоскостях, и перпендикулярных оси вращения звена.
Пусть надо уравновесить силы инерции ротора (рис. 102), вращающегося с угловой скоростью ω, Возьмем на роторе произвольную точку j весом Qj и массой т j на расстоянии р j ; от оси вращения ротора (рис. 102). Сила инерции Р j -. массы т j точки j

Статический момент Qjζj называется неуравновешенностью или дисбалансом, его размерность — гсм.
Все массы ротора будут развивать силы инерции, пропорциональные их неуравновешенностям (дробь  для любой массы ротора будет иметь одно и то же значение). Поэтому в дальнейшем вместо сил инерции можно говорить о соответствующих неуравновешенностях.
для любой массы ротора будет иметь одно и то же значение). Поэтому в дальнейшем вместо сил инерции можно говорить о соответствующих неуравновешенностях.
Проведем в роторе две плоскости исправления I — I и II — II, перпендикулярные оси ротора (рис. 102); их точки пересечения с осью — О 1 и О 2. Разложим силу Р j на две ей параллельные силы PjI и PjII и приложенные в точках О 1 и О 2. Эти силы удовлетворяют условиям

Таких сил (PjI и PjII) будет множество, но они составят две системы сходящихся сил, приложенных соответственно в точках О 1 и О 2. Их равнодействующие будут приложены в тех же точках

| (96)
(96 а)
|
Q IρI и Q IIρII — неуравновешенности в плоскостях I—I и II—II. Для уравновешивания ротора теперь достаточно в точках О 1 и О 2 (рис. 103) приложить по одной силе Р nI и Рп II (на рисунке не показанных), каждая из которых равна и противоположно направлена силам Р nI и Рп II. Для этого надо на продолжении линий действия сил Р nI и Рп II установить противовесы весом Q пI и Q пII на расстояниях ρпI и ρпII от оси вала. Эти противовесы разовьют силы инерции, которые уравновесят силы Рп I и Рп II, если будут соблюдены равенства:

| (97)
(97 а)
|
4°. Уравновешивание инерционных усилий механизма в целом сводится к задаче, требующей того, чтобы все инерционные силы и инерционные моменты подвижных звеньев механизма не передавались на элементы кинематических нар его, связанных со стойкой.
Ограничим задачу уравновешиванием только сил инерции (при практических расчетах об инерционных моментах забывать нельзя). На основании законов механики, равнодействующая всех сил инерции подвижных звеньев механизма
 (98)
(98)
где mS = ∑ mj — масса всех подвижных звеньев;
aS — ускорение общего центра тяжести масс подвижных звеньев.
Эта сила приложена в общем центре тяжести подвижных звеньев и направлена противоположно ускорению этого центра тяжести.
Для уравновешивания силы инерции Рн надо так подобрать массы звеньев механизма и их распределение, чтобы ускорение общего центра тяжести было равно нулю. В равной мере для оценки воздействия инерционных сил на стойку механизма надо знать эту же силу Рн В обоих случаях необходимо знать ускорение общего центра тяжести подвижных звеньев механизма.
Для механизмов с парами пятого класса (низшими) положение общего центра тяжести легко находится методом главных векторов (методом Фишера). Этот вопрос рассмотрим на примере кривошипно-ползунного (шатунного) механизма (рис. 104). В этом механизме три подвижных звена: кривошип АВ (1), шатун ВС (2) и шток (ползун) (3). Центры тяжести звеньев: S 1 S 2, S 3, массы их: т1 т2, т3, длины: l ab = l, 1вс = l 2, координаты центров тяжести: lS 1, lS 2, lS 3, радиусы-векторы, определяющие положения центров тяжести, относительно неподвижного центра шарнира

Радиус-вектор, определяющий положение общего центра тяжести S, найдем из равенства
откуда 
Из рисунка видно, что

подставляя эти значения радиусов-векторов в написанное выше равенство, после группировки параллельных векторов определяем
 (99)
(99)
Введем обозначения:
 (100)
(100)
 (100 а)
(100 а)
 (100 б)
(100 б)
окончательно получим
 (101)
(101)

Векторы 

 называются главными и они параллельны соответствующим звеньям (их межшарнирным линиям): h 1 || AB, h 2 || BC, h 3 || CS 3
называются главными и они параллельны соответствующим звеньям (их межшарнирным линиям): h 1 || AB, h 2 || BC, h 3 || CS 3
На (рис. 105) построена векторная сумма, удовлетворяющая равенству (101). Точка К з конца вектора h 3 указывает положение общего центра тяжести S. Если нас интересует характер движения общего центра тяжести, то для рассматриваемого механизма можно следить за движением копирующей точки K 2, так как вектор  всегда перемещается параллельно самому себе.
всегда перемещается параллельно самому себе.

Одним из способов уравновешивания силы инерции P н (98) будет такой. Подбирают массы кривошипа и шатуна и их распределение таким образом, что модули векторов h 1 и h 2 оказываются равными нулю. В этом случае общий центр тяжести S совпадает с центром шарнира A и его ускорение будет равно нулю, так как этот центр неподвижен.
Для нахождения ускорения общего центра тяжести И. И. Артоболевским предложен метод построения такого механизма, у которого одна из точек движется подобно движению общего центра тяжести. Для нашего примера достаточно найти механизм, у которого одна из его точек двигалась бы как точка К 2 конца вектора  .
.
Построение копирующего механизма проводится так. Присоединяют к основному механизму группу Ассура второго класса

первого вида К1, K 2, К̍ 2 (рис. 106). Центр шарнира К 1 располагают на расстоянии BK 1 = l 1 — h 1 и от центра шарнира В, а центр шарниpa K 2̍ —на расстоянии ВК2' = h 2 от центра шарнира В. Длины звеньев делают равными: K 1 K 2 = h 2, K 2 K 2̍ = l 1 — h 1.
Фигура К 1 ВК 2 'К 2 всегда параллелограмм и центр шарнира K 2 копирует движение конца вектора K 2 и, следовательно, общего центра тяжести S.
Когда копирующий механизм построен, то нахождение скорости и ускорения общего центра тяжести не представляет труда. Это можно сделать методами кинематического анализа механизма, например, методом планов. Если ускорение общего центра тяжести подвижных звеньев механизма найдено, то по формуле (98) можно определить значение суммарного воздействия инерционных сил звеньев механизму на его стойку.
ЛЕКЦИЯ ТРИНАДЦАТАЯ
Определение реакций в