Рассмотрим вопрос преобразования фрикционной передачи в эквивалентную ей зубчатую (рис. 55). Эту передачу получим, если с катками 1 и 2 жестко свяжем профили а и β. Эти профили должны отвечатьзакону Виллиса, т. е. они должны быть такими, у которых нормаль NN в точке А их касания проходит через точку Р касания катков. Этим будет обеспечиваться заданное передаточное отношение. Так спроектированные профили называются сопряженными.

Профили а и β ограничены по своей длине, поэтому, для того чтобы передача была непрерывной, располагаем по окружностям радиусов R 1 и R 2 ряд идентичных профилей на равных дуговых расстояниях t (t — шаг зацепления). Число этих профилей (зубцов) соответственно будет z 1 и z 2. В зубчатой передаче окружности радиусов R 1 и R 2 называются начальными, в реально выполненных колесах они не могут быть измерены, поэтому для зубчатых колес удобнее передаточное отношение находить через отношение чисел зубцов на них. В самом деле, длина начальной окружности второго колеса 2π R 2 = z 2 t. Откуда  =
= 
Приведем формулы для подсчета передаточного отношения различных зацеплений зубчатых колес.
Внешнее зацепление (рис. 56, а)
 (42)
(42)

Внутреннее зацепление (рис. 56, 6)
 (42 а)
(42 а)
Конические колеса (рис. 56, в)
 (45 б)
(45 б)
Заметим, что для фрикционных одноступенчатых передач и для соответствующих зубчатых с прямыми зубцами передаточное отношение не следует назначать больше пяти (или одной пятой). При больших (меньших) передаточных отношениях наблюдается значительный износ поверхности на малом катке (фрикционной передачи) или поверхности зубцов на малом колесе-шестерне (зубчатой передачи)
Большие передаточные отношения можно получить одноступенчатой червячной передачей (рис. 57), для которой
 (43)
(43)
где z 2 — число зубцов на колесе 2
k 1 — число заходов на червяке 1.

В практике числа зубцов на колесе можно назначать от 20 до 200, а число заходов на червяке 1—8. Таким образом, этой передачей можно получить передаточное отношение в пределах 2,5—200.
Решим несколько примеров на подсчет передаточного отношения многоступенчатых передач.
Пример 1. Дана многоступенчатая передача (рис. 58), требуется найти ее передаточное отношение i 14.

Решение. 1) Определяем число ступеней по формуле (37), так как k = 4, то т = 4—1 = 3.
2) Находим передаточные отношения отдельных ступеней по формуле (42):

3) Подсчитываем передаточное отношение всей передачи по формуле (38):

Пример 2. Дана многоступенчатая передача (рис. 59), требуется найти передаточное отношение i 13.
Решение. 1) Определяем число ступеней по формуле (37), так как k = 3, то m = 3 — 1 = 2.
2) Находим передаточные отношения отдельных ступеней по формуле (42):

3) Подсчитываем передаточное отношение всей передачи по формуле (38):

Колеса, числа зубцов которых сокращаются при подсчете передаточного отношения, называются паразитными.
Пример 3. Дана соосная многоступенчатая передача с коническими колесами (рис. 60), требуется найти ее передаточное отношение i 13.
Решение. 1) Определяем число ступеней по формуле (37), так как k = 3, то т = 3—1 = 2.
2) Находим передаточные отношения отдельных ступеней по формуле (42 б):

3) Подсчитываем передаточное отношение всей передачи:

У передаточного отношения следует поставить знак минус, так как колеса 1 и 3 вращаются в разные стороны. Этот знак проще всего определять по правилу стрелок.


Правило стрелок. На колесе 1 ставим стрелку а, идущую к зацеплению его с колесом 2. На колесе 2 стрелка b тоже должна идти к зацеплению с колесом 1. Стрелку b переносим, без изменения ее направления, к зацеплению колеса 2 с колесом 3 — стрелка b '. Стрелка b ' идет от зацепления колеса 2 с колесом 3, поэтому на колесе 3 ставим стрелку с, идущей от зацепления колес 2 и 3. Сравниваем направление стрелок на колесах 1 и 3. В нашем случае они направлены в разные стороны, поэтому передаточному отношению i 13 приписываем знак минус.
ЛЕКЦИЯ СЕДЬМАЯ
(Продолжение шестой лекции)
4°. Сателлитные передачи (передачи, в которых есть звенья с подвижными осями вращения). В основу любой сателлитной передачи входит простейший (составленный из наименьшего числа звеньев) сателлитный механизм (рис. 61). Его составные части: центральное (солнечное) колесо 1 с внешним (рис. 61, а) или внутренним (рис. 61, 6) зацеплением, сателлит 2 — звено с подвижной осью вращения, водило (поводок) H-звено, с которым связана ось вращения сателлита, и стойка о.

Этот механизм имеет две степени подвижности и называется элементарным дифференциальным. В самом деле, по формуле Чебышева (2)

где п —число подвижных звеньев; р 5— число кинематических пар пятого класса и p 4 — число кинематических пар четвертого класса.1
Выведем формулу, связывающую угловые скорости всех звеньев этого механизма с размерами его звеньев (числами зубцов на колесах). Сообщим всем звеньям механизма (рис. 61) угловую скорость — ωH, равную угловой скорости водила, но обратной ей по знаку. Тогда у колеса 1 будет угловая скорость ω1' = ω1—ωH, У колеса 2 его угловая скорость ω2' = ω2—ωH, а водило Н остановится. Мы получили обычную зубчатую передачу с неподвижными осями вращения с внешним зацеплением (рис. 61, а) или с внутренним зацеплением (рис. 61, 6); для этой передачи передаточное отношение
 (44)
(44)
i 12 (H)передаточное отношение от колеса 1 к колесу 2 при остановленном водиле Н.
Формула (44) называется формулой Виллиса и является основной при кинематическом анализе любых сателлитных механизмов. Применительно к механизму (рис. 61, а), она примет вид
 (44 а)
(44 а)
а для механизма (рис. 61,6)
 (44 б)
(44 б)
где z 1 и z 2— числа зубцов на колесах 1 и 2.
Для дифференциального механизма по формуле Виллиса (44) легко найти скорость одного из звеньев, если будут заданы скорости двух других.
Элементарный планетарный механизм получится тогда, когда в элементарном дифференциальном механизме солнечное колесо 1 сделано неподвижным (рис. 62).
Этот механизм имеет одну степень свободы, так как для него по формуле Чебышева

Поэтому для это механизма можно говорить о его передаточном отношении, которое найдется по формуле Виллиса (44), если в ней угловую скорость колеса 1 приравнять нулю, то
и так как  есть отношение угловой скорости сателлита 2 к угловой скорости водила H, т. е. передаточное отношение i 2 H, то окончательно получим
есть отношение угловой скорости сателлита 2 к угловой скорости водила H, т. е. передаточное отношение i 2 H, то окончательно получим
 (45)
(45)

Передаточное отношение планетарного механизма (oт колеса к поводку) равно единице минус передаточное отношение передачи составленной из тех же колес, но при неподвижном поводке.
Для механизма (рис. 62, а) формула (45) примет вид
 (45 а)
(45 а)
а для механизма (62, б)
 (45 б)
(45 б)
Рассмотрим теперь дифференциальные (рис. 63) и планетарный (рис. 64) редукторы. Начнем с дифференциальных редукторов (рис. 63). Степень подвижности этих редукторов равна двум. У ни три звена имеют неподвижные оси вращения (колесо 1, колесо 3 поводок H), поэтому для сообщения определенности движения всем звеньям редуктора подвод мощности можно осуществить к двум звеньям с неподвижными осями вращения, а отвод ее тоже от звена с неподвижной осью.


Найдем соотношение между угловыми скоростями колес 1 и 3, а также поводка (водила) H, для этого напишем формулу Виллиса (44)
дважды: для колеса 1, сателлита 2 и водила Н (рис. 63, а и рис. 63, 6) и для сателлита 2' (рис. 63, а) или сателлита 2 (рис. 63, 6), колеса 3 и водила H:

Перемножив правые и левые части написанных равенств, получим
 (46)
(46)
Формула (46) является формулой Виллиса для дифференциальных редукторов. В этой формуле i 13(H) — передаточное отношение редуктора, составленного из тех же колес, но при остановленном водиле.
Для редуктора по рис. 63, а формула Виллиса (44) примет вид
 (46 a)
(46 a)
а для редуктора по рис. 63, б
 (46 б)
(46 б)
где z 1, z 2, z 2̍, z 3—числа зубцов на соответствующих колесах.
Планетарный одноступенчатый редуктор можно получить при условии, если в дифференциальном редукторе положить равным нулю угловую скорость одного из центральных колес (колес 1 или 3).
На рис. 64, а и 6 колесо 3 остановлено.
Передаточное отношение таких редукторов
 (47)
(47)
Эта формула выведена из формулы (46), в которой угловая скорость колеса 3 положена равной нулю. В ней так же, как и в формуле (46), i 13(H) - передаточное отношение редуктора, составленного из тех же колес, но при остановленном водиле и свободном колесе 3.
Для редуктора типа Давида (рис. 64, а) формула (47) будет
 (47 а)
(47 а)
а для редуктора типа Джемса (рис. 64, 6)
 (47 б)
(47 б)
Из формулы (47 а) видно, что редуктором типа Давида можно получить весьма большую трансформацию угловых скоростей, так как дробь  можно сделать
можно сделать
сколь угодно мало отличающейся от единицы. Поэтому разность 1 — будет очень малой дробью. Следует указать, что если i 13(H) будет малой дробью, то редуктор может оказаться самотормозящимся, т. е. таким, в котором никакой момент, приложенный к колесу 1, не сможет привести в движение остальные звенья редуктора. При ведущем водиле H, т. е. при передаточном отношении, большем единицы, самоторможение
не наступит и передача движения всегда возможна. При i H1 =  ,
,
имеющим большое значение, редуктор типа Давида обладает весьма малым к. п. д., поэтому для силовых передач он не может быть рекомендован.
Редуктор типа Джемса имеет передаточное отношение i 1H, отличающееся от i 13 ( H ) только на единицу, но его к. п. д. больше, чем у редуктора, составленного из тех же колес при неподвижном водиле. Эти редукторы могут быть рекомендованы для силовых передач.
В заключение укажем, что формулу (47) можно применять к планетарным одноступенчатым редукторам, образованным коническими колесами.
Напомним, что одноступенчатый планетарный редуктор состоит из: 1) солнечного подвижного колеса, 2) сателлита или блока их, 3) водила и 4) солнечного неподвижного колеса. Формулы (47), (47 а) и (47 б) применимы только к одноступенчатым планетарным редукторам.
Решим примеры на определение передаточных отношений для различных редукторов.
Пример 1. Дан редуктор типа Давида (рис. 64, а). Числа зубцов па его колесах: z 1=100, z 2 = 99, z 2 = 100, z 3 = 101. Требуется подсчитать i 1H и i H1
Решение. 1) Определяем число ступеней. Так как k = 2, то т = 1.
2) Подсчитываем передаточное отношение по формуле (47, а)

Пример 2. Дан редуктор типа Джемса (рис. 64, б). Числа зубцов на колесах z 1 = 20, z3 = 80. Требуется подсчитать i 1 H.
Решение 1) Определяем число ступеней, так как k = 2, то m = 1.
2) Подсчитать передаточное отношение по формуле (47 б)

Пример 3. Дан редуктор (рис. 65). Числа зубцов указаны на рисунке. Требуется определить i 1H.

Решение. 1) Определяем число ступеней, так как k = 3, то т = 2.
2) Подсчитываем передаточное отношение каждой ступени:
для ступени от оси О 1 к О 2 i 12 = - = -  = - 3;
= - 3;
для ступени от оси О 2 к О H i 2H = 1 – i 2’4 (H) = 1-  *
*  = -7.
= -7.
3) Находим передаточное отношение редуктора по формуле (38)
i 1H = i 12 i 2H = (-3) (-7) = 21
Пр имер 4. Дан редуктор (рис. 66). Числа зубцов указаны на рисунке. Требуетсяопределить i 15.
Решение. 1) Определяем число ступеней. Так как k =3, то m =2
2) Подсчитываем передаточное отношение каждой ступени: для ступени от оси О1 к О2
Пример 5. Дан редуктор тельфера (подъемника) (рис. 67).
Ведущее звено 1, ведомое звено 3 (барабан). Требуется найти передаточное отношение i 13

Этот редуктор образован замкнутым дифференциальным редуктором. Замкнутый дифференциальный редуктор получается из дифференциального, если любые два его звена с неподвижными осями вращения кинематически связать. В нашем примере водило Н связано двухступенчатой простой передачей со звеном 3 (барабаном). Эта передача образована колесами 4, 5 и 3'.
Решение. 1) Для дифференциального редуктора применим формулу Виллиса (46 6):

2) Для замыкающей цепи

откуда

3) Искомое передаточное отношение найдем совместным решением уравнений, написанных в пунктах 1 и 2:

|
 Пример 6. Дан редуктор (рис. 68), составленный из конических зубчатых колес. Числа зубцов на колесах указаны на рисунке. Требуется определить передаточное отношение i 1H.
Пример 6. Дан редуктор (рис. 68), составленный из конических зубчатых колес. Числа зубцов на колесах указаны на рисунке. Требуется определить передаточное отношение i 1H.
|
Решение. 1) Определяем число ступеней. Так как k =2, то т = 1.
2) Подсчитываем передаточное отношение по формуле (47), в которой знак i 13 (H) устанавливаем по правилу стрелок:

ЛЕКЦИЯ ВОСЬМАЯ
Тема IV. ДИНАМИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМОВ
§ 8. Постановка задачи и приведение сил (моментов) и масс (моментов инерции)
1°. В разделе рассматриваются две задачи: 1) об истинном законе движения звеньев механизма под действием приложенных сил с учетом масс этих звеньев и 2) о регулировании движения звеньев механизма. Эти задачи будут решаться для систем с одной степенью свободы.
Для уяснения сущности поставленных задач разберем устройство и работу машинного агрегата (рис. 69), состоящего из двигателя Д, муфты сцепления М, редуктора Р и рабочей машины С. К рабочему органу О рабочей машины приложено полезное сопротивление, которое может быть либо силой полезного сопротивления Р ПС, либо моментом полезного сопротивления МПС. К рабочему органу двигателя (поршню, лопатке турбины, ротору электродвигателя) подводится энергия Э, которая создает на выходном валу его движущее усилие (движущую силу Рл или движущий момент Мд). Величина этого усилия зависит от количества подводимой энергии, которая определяется положением управляющего органа 3. Все звенья механизмов, вошедших в машинный агрегат, обладают соответствующими массами.

Проследим за работой (движением) машинного агрегата. Для этого будем наблюдать движение выходного вала двигателя О д.
Пуск в ход агрегата. Изменяя положение управляющего органа 3, подаем в двигатель столько энергии, чтобы ее было достаточно для создания такого момента МД, который бы преодолел все сопротивления, приложенные к звеньям агрегата. Этими сопротивлениямибудут: сила или момент, приложенные к рабочему органу рабочей машины (полезные сопротивления) и силы вредного сопротивления, возникающие вследствие трения в кинематических парах механизмов агрегата и сопротивления среды, в которой они движутся.
Пуск двигателя можно осуществлять при включенной или выключенной муфте сцепления М, при наличии полезной нагрузки или без нее. Все это зависит от конкретного агрегата и механических характеристик двигателя и рабочей машины. О механических характеристиках будет сказано дальше.
Период разгона. Если работа движущего усилия будет больше работы всех сопротивлений, то вал двигателя О д будет двигаться ускоренно и скорость его будет возрастать. Энергетический баланс этого вида (стадии) движения
 (48)
(48)
где А Д — работа движущего усилия;
АС — работа сил сопротивления;
∆Т — прирост кинетической энергии системы.
При достижении валом О д скорости, при которой должен работать агрегат (номинальной скорости, определяемой технологическим процессом), установкой управляющего органа 3 достигают уравнивания работы А д и Ас. Наступает установившийся вид (стадия) движения агрегата. Энергетический баланс его
 (49)
(49)
это движение может продолжаться сколь угодно долго.
Для остановки агрегата отключают подачу энергии. Агрегат остановится после того, как вся запасенная им кинетическая энергия израсходуется на преодоление всех сопротивлений. Для ускорения остановки вводят добавочные сопротивления (тормоза).
Вид движения, когда скорость вала О д убывает, называете; выбегом, его энергетический баланс
 (50)
(50)
В выражениях (48) — (50) работы АД и Ас, а также прирос кинетической энергии ∆ Т подсчитываются не менее чем для одного динамического цикла работы агрегата.
При установившемся движении скорость выходного вала О Д двигателя не будет постоянной величиной. Ее значение буде колебаться около некоторой средней величины, которая и буде называться номинальной угловой скоростью.
Управление машинным агрегатом можно осуществить двояко: 1) по разомкнутому контуру, когда положение управляющее органа 3 определяется человеком (машинистом) и 2) по замкнутому контуру, когда положение управляющего органа 3 устанавливается автоматически.
Обычно пуск в ход агрегата осуществляется вручную (по разомкнутому контуру, а установившийся режим управляется автоматически (по замкнутому контуру)). Выбег тоже осуществляется по разомкнутому контуру.
Решение намеченных задач динамического анализа значительно упростится, если мы будем рассматривать движение не всего агрегата в целом, а только одного ведущего звена его. Это звено Удобно выбирать входящим во вращательную кинематическую пару со стойкой и совершающим полный оборот вокруг своей оси. Найдя закон движения этого звена, движение остальных можно найти известными методами кинематического анализа. Для того чтобы «заменить» движение механизма движением одного звена, надо мысленно выделить из механизма это звено и поставить его в те же динамические условия, в которых оно находилось в механизме. Этот процесс носит название приведения сил и масс. Он всегда должен предшествовать Динамическому анализу механизма.
2°. Приведение сил. Все внешние силы, приложенные к звеньям механизма, разделим на движущие и будем приписывать им индекс «д» и сопротивления, которые будем обозначать индексом «с». Приведенным усилием будем называть силу или момент, которые передаются на ведущее звено вследствие действия на остальные звенья сил
или моментов.
Приведенная сила РП или приведенный момент М П находятся из равенства элементарных работ этих усилий и элементарных работ приводимых усилий (сил или моментов) (рис. 70):

|

|
где Р П и М П — приведенные сила или момент;
dS П, d φ П — элементарные перемещения точки приложения приведенной силы или звена, к которому приложен момент, здесь суммирование приводится по всем приводимым силам и моментам;
φ k — угол между направлением приведенной силы и направлением элементарного перемещения приведенной силы
Р j, Mj — приводимые сила и момент;
dSj, dφj —элементарные перемещения точки приложения приводимой силы и звена, к которому приложен момент;
φ kj — угол между направлением приводимой силы и элементарным перемещением.
Продифференцировав по времени правые и левые части равенств (51) и (51 а) и найдя затем Рп и Мп, окончательно получим

где υn — скорость точки приложения приведенной силы;
ωп — угловая скорость звена приведения;
υj —скорость точки приложения приводимой силы;
ω j — угловая скорость звена, к которому приложен приводимый момент,
здесь суммирование проводится по всем приводимым силам и моментам.
Из выражений (52) и (52 а) видно, что приведенное усилие зависит от отношения скоростей в механизме (передаточного отношения), а оно, при заданной схеме механизма и размерах звеньев, в свою очередь, зависит только от положения ведущего звена.
Выражения (52) и (52 а) получены из равенства мощностей, поэтому можно дать еще одно определение приведенного усилия: приведенное усилие (сила или момент), это такое усилие, мощность которого равна сумме мощностей приводимых усилий (сил или моментов).
3°. Подсчет мощности, развиваемой силой, посредством рычага Жуковского. Для стержневых механизмов (механизмов с кинематическими парами пятого класса) задача о нахождении мощности, развиваемой силой, очень просто и изящно может быть решена, если применить рычаг Жуковского. Эту задачу приходится решать тогда, когда идет речь о приведении сил. Дан механизм ABCD (рис. 71, а) с приложенной в точке J силой Р j Требуется подсчитать мощность, развиваемую этой силой по формуле

Построим повернутый план скоростей (рис. 71,6) этого механизма и перепишем выражение для мощности, воспользовавшись построенным планом скоростей:
Nj = Pj (pj) µυ cos φ j., где µ υ- масштаб плана. Перенесем в план скоростей, параллельно самой себе, силу Pj и приложим ее в точку j — конец вектора скорости точки J. На направление силы Р} из полюса плана р опустим перпендикуляр pk. По перпендикулярности сторон угол jpk будет равен углу φj, углу между направлением силы и скорости точки I ее приложения. Из треугольника kjp отрезок pk = hj = υ (pj) cos φ j,
поэтому 

Следовательно, мощность, развиваемую силой, можно найти так: надо построить повернутый план скоростей. Перенести в этот план силу параллельно самой себе в
| одноименную с механизмом, точку. Найти кратчайшее расстояние от направления силы до полюса плана (плечо силы). Принять повернутый план скоростей за рычаг с точкой опоры в полюсе и написать выражение момента силы относительно этого полюса, полученное выражение умножить на масштаб плана. При приведении сил масштаб плана скоростей будет не нужен, так как в результате решения он сократится.
4°. Приведение масс.
|

|
Приведенной массой тп механизма или его приведенным моментом инерции I п называется такая фиктивная масса, сосредоточенная в выбранной точке звена приведения (ведущего), или такой момент инерции этого звена, при которых кинетическая энергия этой точки или звена будет равна кинетической энергии всех масс звеньев механизма. Пусть звеном приведения (ведущим) (рис. 72) будет А В, точкой приведения — В Скорость точки приведения υB и угловая скорость звена приведения (ведущего) ωAB, тогда
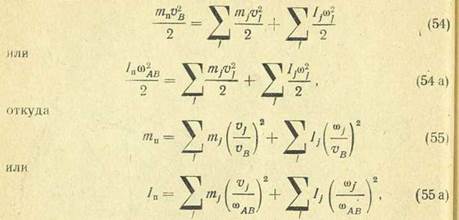
где т j - масса и момент инерции звена j
υj — скорость центра тяжести звена j;
ω j - — угловая скорость звена j.
Здесь суммирование проводится по всем приводимым массам и моментам инерции.
Приведенный момент инерции может быть найден еще по формуле

L ав — расстояние от точки приведения В до оси вращения А звена j приведения (ведущего).
Из выражений (55) и (55 а) следует, что приведенная масса или приведенный момент инерции, при заданной схеме механизма и размерах его звеньев, зависит от квадратов отношений скоростей (от квадратов передаточных отношений), а эти отношения зависят от положения ведущего звена (по рис. 72 от угла φAB).
Приведение масс осуществляется сравнением кинетических энергий, это логически вытекает из энергетики машин (механизмов), так как для них алгебраическая сумма работ внешних сил приложенных к их звеньям, равна приросту кинетической энергии системы (машины или механизма). Иначе говоря, приведенная масса должна обладать той же энергоемкостью, что и сама машина (механизм).
5°. Примеры на приведение сил и масс.
Пр имер 1. Дан кривошипно-шатунный (ползунный) механизм (рис. 73). К его звеньям приложены силы Р2 и Р3,. Центры тяжести звеньев обозначены буквой S. Размеры l, массы т и центральные моменты инерции l звеньев известны. Для заданного положения механизма, определяемого углом φ1 ведущегоp, найти приведенные к точке В звена А В силу Рп, перпендикулярную А В, и массу тп (рис. 73,6).

Решение. 1) Строим положение механизма (рис. 73, а).
2) Строим план скоростей механизма (рис. 73, в) и определяем углы между направлением сил и направлением скоростей их точек приложения. Угол между Рп и υB равен нулю, угол между силой Р 3 и υ С равен нулю и угол между силой Р2 и υM равен φ2.
3) Находим приведенную силу из равенства мощностей (52):

откуда

или

где pb, рт, рс — отрезки из плана скоростей (в этом положении механизма угол φ з = 0 и, следовательно, cos φ з = 1).
4)Находим приведенную силу посредством рычага Жуковского (второе решение). Строим повернутый план скоростей (рис. 73, г) и переносим в него силы Р п, Р2 и Р3 параллельно самим себе в одноименные точки. Записываем равенство моментов этих сил относительно полюса плана р (масштаб плана скоростей сокращается)

но так как

то

5)Приведенную массу находим из равенства кинетических энергий (54):

где T 1, T 2, T 3 – кинетические энергии звеньев 1, 2 и 3,

тп — приведенная масса,

Выразим угловые скорости через соответствующие линейные:

и подставим их значения в выражение для приведенной массы, заменив в нем скорости отрезками из плана скоростей, тогда получим окончательно

В решенном примере отношение скоростей от положения к положению механизма будет меняться и, следовательно, приведенная масса будет переменной величиной, зависящей от положения ведущего звена
Пример 2. Дана рядовая зубчатая передача (рис. 74, а). К колесу 4 приложен момент М 4, (моменты, направленные против часовой стрелки, будем считать положительными). Числа зубцов z на колесах, а также их моменты инерции I относительно осей вращения О известны. Найти приведенные к колесу 1 (рис. 74, б)момент М п и момент инерции I п
Решение. 1) Находим Мп из равенства мощностей.

Знак минус указывает, что приведенный момент M п направлен по часовой стрелка

2) Находим приведенный момент инерции I п из равенства кинетических энергий:

В решенном примере приведенный момент инерции будет постоянной величиной вследствие постоянства передаточных отношений.
ЛЕКЦИЯ ДЕВЯТАЯ
§ 9. Механические характеристики машин. Основные уравнения движения ведущего звена механизма. Решение задачи об истинном движении ведущего звена при условии, что приведенный движущий момент МД, приведенный момент сопротивления МС и приведенный момент инерции I П зависят от координаты ведущего звена φ1
1°. Из предыдущей лекции знаем, что изучать движение механизма проще, если рассматривать только движение одного ведущего звена.
Мы будем выбирать ведущим звеном такое, которое входит во вращательную кинематическую пару со стойкой. Тогда, после приведения усилий (сил и моментов) и масс, будем иметь дело с вращающимся звеном АВ (рис. 75), к которому приложены приведенный движущий момент МД и приведенный момент сопротивления МС , а приведенная масса этого звена оценивается его приведенным моментом инерции I П.

| Положение ведущего звена опре-деляется его угловой координатой φ1. Наша задача найти истинный закон движения этого звена, т. е. выявить одну из следующих четырех зависи-мостей:
 Знание любой из них позволит легко найти остальные, так как
Знание любой из них позволит легко найти остальные, так как

|
Исходными данными для нахождения зависимостей (57) будут МД, МС и I П. Эти параметры могут быть постоянными и переменными. Их изменяемость зависит: 1) от механизма, который под лежит исследованию (какое будет передаточное отношение его) и 2) от механических характеристик тех машин, которые образовали тот агрегат, в который входит исследуемый механизм (этот пункт касается только приведенных моментов движущих сил и сил сопротивления.
| 2°.Механической характеристикой машины называется зависимость усилия (силы или момента), приложенного к рабочему органу ее, от кинематических параметров (перемещения или скорости) этого органа.
В некоторых случаях эта зависимость отсутствует и это усилие либо постоянно, либо является функцией других параметров, например, времени.
Рассмотрим характеристики некоторых машин. Начнем с двигателей.
| 
|
Гиревой двигатель (рис. 76), для него момент на его валу будет величиной постоянной, поэтому характеристика отвечает равенству
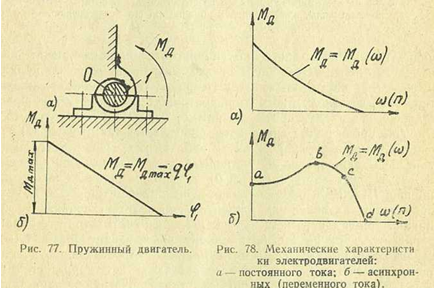
М = QR. Пружинный двигатель (рис. 77, а), его характеристика дана на рис. 77,6, очевидно, что Мд= Мд (φ). Электродвигатели: постоянного тока, его характеристика представлена на рис. 78, а, асинхронный переменного тока, его характеристика показана на рис. 78,6. Для этих двигателей момент на их валах Мд=Мд(ω).
Карбюраторный двигатель внутреннего сгорания имеет характеристику, указанную на рис. 79, а, т. е. МД=МД (ω). Здесь имеется

в виду изменение среднего за один динамический цикл машины движущего момента на ее валу. Если рассматривать изменение движущего усилия внутри динамического цикла, то механическая характеристика четырехтактного карбюраторного двигателя будет представлена его индикаторной диаграммой (рис. 79,6) и РД = P Д (S). Рабочий процесс этой диаграммой описывается так: первый такт — сжатие, кривая ab;второй такт — рабочий ход, кривая bcd; третий такт — выхлоп, кривая de; четвертый такт — всасывание, кривая еа. В верхней части (рис. 79, б) показаны крайние положения поршня П' и П" и промежуточное — на рабочем ходу П"'. В этом положении давление на поршень определится ординатой уп индикаторной диаграммы. Рабочие машины: вентилятор, его характеристика дана на рис. 80 и момент на его валу Мс = Мс(ω); строгальный станок, при малом изменении скорости суп








