

История создания датчика движения: Первый прибор для обнаружения движения был изобретен немецким физиком Генрихом Герцем...

Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...
История создания датчика движения: Первый прибор для обнаружения движения был изобретен немецким физиком Генрихом Герцем...
Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...
Топ:
Устройство и оснащение процедурного кабинета: Решающая роль в обеспечении правильного лечения пациентов отводится процедурной медсестре...
Характеристика АТП и сварочно-жестяницкого участка: Транспорт в настоящее время является одной из важнейших отраслей народного хозяйства...
Интересное:
Наиболее распространенные виды рака: Раковая опухоль — это самостоятельное новообразование, которое может возникнуть и от повышенного давления...
Уполаживание и террасирование склонов: Если глубина оврага более 5 м необходимо устройство берм. Варианты использования оврагов для градостроительных целей...
Инженерная защита территорий, зданий и сооружений от опасных геологических процессов: Изучение оползневых явлений, оценка устойчивости склонов и проектирование противооползневых сооружений — актуальнейшие задачи, стоящие перед отечественными...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
Для того чтобы из замкнутой кинематической цепи получить механизм, т. е. — систему определенного движения, надо: одно из звеньев предполагать неподвижным, оно называется стойкой; одному или нескольким звеньям задать движение так, чтобы остальные двигались совершенно определенным образом, такое звено (звенья) будет ведущим (ведущими), остальные звенья — ведомыми.
Механизмом называется замкнутая кинематическая цепь с одним звеном, обращенным в стойку. В этой цепи движение ведомых звеньев вполне определяется независимым заданным движением ведущего звена (ведущих звеньев). Механизмы со многими ведущими звеньями называются дифференциальными. Большинство механизмов имеет одно ведущее звено.
2°. Элементом кинематической пары называется геометрический образ (точка, линия, поверхность), жестко связанный со звеном, которым он подвижно соединяется с соответствующим образом (точкой, линией, поверхностью) на другом звене. Если в кинематической паре ее элементы касаются поверхностями, то такая пара называется низшей, если же точкой или линией, то — высшей. Очевидно, что в силовых устройствах желательно применять механизмы с низшими парами, а в механизмах, имеющих чисто кинематическое назначение, вполне допустимы высшие пары. Конечно, это положение нельзя рассматривать как непреложное правило. Примером служат широко распространенные зубчатые механизмы. Приведенная выше классификация кинематических пар принадлежит эльзасскому ученому Францу Рёло. Эта классификация не рассматривает вид относительных движений, которые будут у звеньев, вошедших в нее. В классификации, предложенной академиком И. И. Артоболевским и другими советскими учеными, учитываются возможные относительные движения звеньев, вошедших в кинематическую пару.
|
|
По Артоболевскому класс кинематической пары определяется числом условий связи, которые накладываются на относительное движение звена, входящего в данную кинематическую пару. Поясним это подробнее. Как известно, свободное тело в пространстве обладает шестью степенями свободы, т. е. положение его относительно выбранной системы координат определяется тремя координатами одной его точки и тремя эйлеровыми углами или, в кинематическом смысле, оно может иметь шесть независимых движений: три поступательных вдоль координатных осей и три вращательных относительно этих осей (рис. 1).
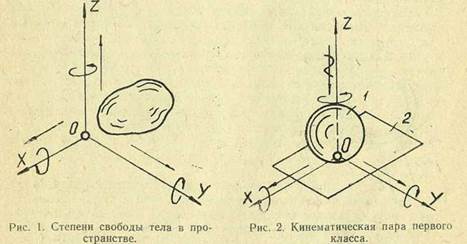
На рис. 2 показана кинематическая пара, образованная шаровой поверхностью звена 1 и плоскостью звена 2. Поместим начало координат в точку О контакта шара с плоскостью, ось Oz направим перпендикулярно плоскости, а оси Ох и Оу расположим в этой плоскости. Условимся, что размыкание элементов пары не допустимо (исчезает пара) и звенья, вошедшие в нее, абсолютно жесткие. Нетрудно сообразить, что мы имеем дело с кинематической парой первого класса, так как невозможно одно поступательное движение вдоль оси О z.

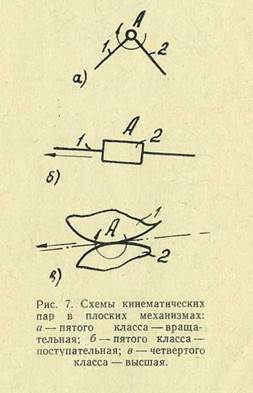
На рис. 3 показаны пары пятого класса и их условные изображения на схемах механизмов, на рис. 4 —пара третьего класса

шаровой шарнир, на рис. 5 — пара четвертого класса (цилиндрическая). Следует помнить, что в отдельных случаях класс пары может зависеть от того механизма, в котором имеется это соединение. Например, поршень в цилиндре образует пару четвертого класса, но если эта пара имеется в плоском кривошипно-ползунном (шатунном) механизме, то ее следует отнести к пятому классу и назвать поступательной (поршень не может поворачиваться относительно продольной оси цилиндра). На этом можно закончить вопрос о структуре механизмов.
Классификация механизмов
1°. Механизмы образуют множество, в которое входят тысячи единиц различных наименований. Так, в справочнике И. И. Артоболевского «Механизмы» приведено около 4000 различных механизмов, в справочнике Н. С. Кожевникова — 3000, а у Доброгурского — 1500. Для того чтобы разработать единые приемы их анализа и синтеза, эти механизмы разделяют на плоские, т. е. такие, у которых все звенья движутся параллельно одной и той же плоскости, и пространственные. Плоские механизмы получили большее применение в технике, поэтому их теория разработана наиболее полно. Мы будем изучать только плоские механизмы. Следует указать, что с развитием техники пространственные механизмы находят все большее применение. Развитию теории этих механизмов наука в основном обязана работам отечественных ученых. Профессор Н. И. Мерцалов впервые в мире читал курс пространственных механизмов в 1921 году на инженерном факультете Московской сельскохозяйственной Академии им. К. А. Тимирязева, а И. И. Артоболевский в 1937 г. написал монографию «Пространственные механизмы». В дальнейшем над теорией пространственных механизмов работали: проф. Г. Г. Баранов, чл.-корр. АН СССР В. В. Добровольский, проф. Вяч. А. Зиновьев и другие.
|
|
2°. Выше было сказано, что замкнутая кинематическая цепь только тогда будет механизмом, когда число ведущих звеньев будет достаточным для сообщения ведомым определенности движения. Чтобы установить это число, применяют структурные формулы, особые для пространственных и плоских механизмов.
Формула Сомова — Малышева для пространственных механизмов, у которых нет общих для всех звеньев условий связи:
 (1)
(1)
где w —степень подвижности механизма;
п — число подвижных звеньев механизма;
p 5, p 4, p 3, p 2, p 1— число кинематических пар соответственно пятого, четвертого, третьего, второго и первого классов.
Вывод этой формулы несложен: каждое звено в свободном состоянии обладает шестью степенями свободы, следовательно, п таких звеньев имеют 6 п степеней свободы. При вхождении звена в пару пятого класса на его относительное движение накладывается пять условий связи, если число таких пар будет р 4, то они наложат 5 р 5 условий связи. Аналогично р 4 пар четвертого класса наложат 4р 4 условий связи и т. д.
Разность между числом степеней свободы и числом условий связи и дает нам степень подвижности механизма, т. е. число тех независимых движений, которыми мы можем задаваться. Иначе говоря: степень подвижности механизма равна числу необходимых ведущих звеньев.
|
|
Для плоских механизмов применяется формула Чебышева
 (2)
(2)
Вывод этой формулы такой же, как и формулы Сомова — Малышева. Надо только иметь в виду, что в плоском движении звено имеет три степени свободы, а кинематические пары могут быть лишь пятого (вращательная или поступательная) или четвертого (высшая) классов. Пара пятого класса вносит в плоское движение звена два условия связи, пара четвертого — одно условие.
При пользовании структурными формулами предварительно надо выяснить, нет ли у всех звеньев общих для них условий связи, а затем, нет ли в механизме звеньев, вносящих пассивные связи или лишние степени свободы, эти звенья следует из расчета исключить.
Закончим лекцию чтением схем плоских механизмов и подсчетом степеней подвижности их.
На рис. 6 показано схематическое изображение звена, на рис. 7— кинематические пары. Вращательная и поступательная пары — пары пятого класса, высшая — пара четвертого класса.
Решим примеры. Условимся: звенья нумеровать арабскими цифрами, кинематические пары обозначать большими буквами латинского алфавита, число всех звеньев — k, число подвижных звеньев — п, число пар пятого класса — р 5, число пар четвертого класса — р 4, степень подвижности — ω.
На рис. 8 дана схема шарнирного четырехзвенного механизма, для него k =4, п =3, р 5 =4, р 4 =0, следовательно, ω =3 • 2—2 •4=1.
На рис. 9 дана схема кривошипно-шатунного (ползунного) механизма, для которого k = 4, п = 3, р 5 = 4, р 4 = 0, следовательно, ω = 3•3 — 2•4 = 1.
На рис. 10 дана схема кулисного механизма Витворта, для него k = 4, п = 3, р 5 = 4, р 4 = 0, следовательно, ω = 3•3 — 2•4 = 1.
На рис. 11 дана схема кулачкового механизма, для которого k = 3, п= 2, р 5 = 2, р 1 = l, следовательно, ω = 3•2 — 2•2 — 1 = 1.
На рис. 12 дана схема кулачкового механизма с роликом на конце штанги. Ролик в этом механизме поставлен для уменьшения трения и на кинематику штанги не влияет, поэтому его из расчета надо исключить, достаточно считать его жестко связанным со штангой.
|
|






Расчет степени подвижности для этого механизма не отличается от предыдущего примера.

На рис. 13 дана схема механизма Поселье — Липкина, для него k = 8, n = 7, р 5 = 10, р 4 = 0, следовательно, ω = 3•7 — 2•10=1. (У этого механизма в точках В, С, D, Е следует считать по две пары пятого класса, так как в них сходятся по три звена.)
ЛЕКЦИЯ ВТОРАЯ
Классификация плоских
|
|
|

Своеобразие русской архитектуры: Основной материал – дерево – быстрота постройки, но недолговечность и необходимость деления...

Эмиссия газов от очистных сооружений канализации: В последние годы внимание мирового сообщества сосредоточено на экологических проблемах...

Поперечные профили набережных и береговой полосы: На городских территориях берегоукрепление проектируют с учетом технических и экономических требований, но особое значение придают эстетическим...

Типы оградительных сооружений в морском порту: По расположению оградительных сооружений в плане различают волноломы, обе оконечности...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!