Отметки промежуточных точек на выпуклой кривой радиуса R1 определяют по формуле:
Hm(n) = Hm(B) – ℓn2 / (2 R1),
где Hm(B) – отметка вершины выпуклой кривой;
ℓn – расстояние от вершины кривой до точки n.
Пикетное положение и отметка начала вогнутой кривой определяют по формулам:
PKm(НK) = PKm(Аn-1) -Т2; Hm(НK) = Hm(Аn-1) -Т2 (± i2).
Отметки промежуточных точек вогнутой кривой определяют, размещая начало координат в начале вогнутой кривой на пикете PKm(НK) с отметкой Hm (НK):
Hm(n) = Hm(НK) ± i2∙x + x2 / (2R2),
где x – расстояние от начала вогнутой кривой до промежуточной точки.
Далее составляют чертеж «Ломанный продольный профиль трассы верхней дороги» в масштабах 1:5000 и 1: 500. Он включает черный профиль верхней дороги, ломанный продольный профиль этой дороги. На подходах к путепроводу пикетное положение и отметки переломов обозначают в соответствии с ранее выполненными расчетами по схемам представленных на рисунках (2.3.1 и 2.3.3).
Чертеж «Продольный профиль верхней дороги» имеет состав, аналогичный составу чертежа «Продольный профиль нижней дороги».
2.4. Проектирование плана трассы левоповоротных соединительных ответвлений на транспортной развязке «клеверный лист».
На транспортной развязке, «клеверный лист» проектируют петлевые односторонние левоповоротные соединительные ответвления (ЛПО) по типу1 или по типу 2 (рис.1.4).
План трассы левоповоротных соединительных ответвлений (ЛПО) по типу 1 включает две переходные кривые L и круговую кривую Ko (рис. 2.4.1). План трассы ЛПО по типу 2 (рис. 2.4.4) состоит из двух закруглений малого радиуса и прямой вставки между ними.
Расчетная скорость движения автомобиля на ЛПО по типу 1 назначается равной 40км/ч. По ТКП 509 – 2014 этой скорости соответствует минимальный радиус круговой кривой 50м.
Расчетная скорость движения автомобиля на ЛПО по типу 2 принимается равной 40км/ч на отмыкании от дороги и 30 км/ч на примыкании. На примыкании допускается уменьшать радиус круговой кривой до 30м.
Длина переходной кривой принимается по таблице 6 ТКП 509 – 2014 равной 50м в случае круговой кривой радиуса 50м и равной 40м в случае круговой кривой радиуса 30м.
Основными параметрами закругления с переходной кривой является:
– угол переходной кривой β, вычисляется по формуле (2.4.1):
β= L/(2R) · 180/ π, град (2.4.1)
- тангенс t переходной кривой и сдвижка р круговой кривой, которые определяются по формулам:
t =Xв – Rsinβ; (2.4.2)
p = Ув – R (1-cosβ). (2.4.3)
В формулах (2.4.2) и (2.4.3) переменные Xв и Ув являются координатами конца переходной кривой (точка В, рис.2.4.3.). Они определяются по формулам 2.4.4 и 2.4.5.:
Xв = L – L3 / (40R2); (2.4.4)
Ув = L2 / (6R) – L4 / (336R3). (2.4.5)
где L– длина переходной кривой, м;
R – радиус круговой кривой, м.
2.4.1. Проектирование плана трассы ЛПО по типу1.
Трасса ЛПО по типу 1 проектируется по схеме L + Ko + L. Длина круговой кривой Ko вычисляется по формуле (2.4.6):
Ko = R·φ·π/180, (2.4.6)
где φ – центральный угол (рис. 2.4.1), определяется по формуле:
φ = 180+α – 2β,
где α – угол пересечения осей дорог, градусы;
β – угол переходной кривой вычисляется по формуле (2.4.1).
Основными точками плана трассы ЛПО по типу1 являются (рис. 2.4.1) начало (точка А) и конец ЛПО (точка А'), конец первой переходной кривой (точка В) и второй (точкаB'), середина трассы ЛПО (точка СО).
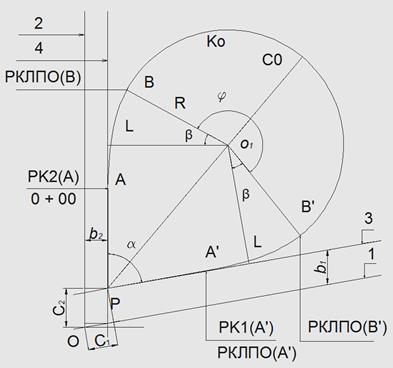
Рис. 2.4.1. Схема к определению пикетного положения основных точек ЛПО:
1,2 – оси пересекающихся дорог; 3,4 – оси переходно-скоростных полос.
Пикетное положение точек А, В, СО, B ', А' на ЛПО по типу 1 определяют по формулам (рис.2.4.1):
PКЛПО(А) = 0 +00;
PКЛПО(B) = L;
PКЛПО(CO) = L + 0.5Ko;
PКЛПО(B') = L + Ko;
PКЛПО(A') = L + Ko + L.
Предварительно определяют смещения С1 и С2 точки Р пересечения осей сопрягаемых полос 3 и 4 относительно точки О пересечения осей дорог 1 и 2 (рис.2.4.1), а также расстояние РА от точки Р до начала ЛПО.
Смещение С1 точки Р (рис.2.4.1) относительно точки О вдоль дороги 1 определяют по формуле (2.4.7) и С2 вдоль дороги 2 по формуле (2.4.8):
С1 = b2 / sinα+ b1ctgα; (2.4.7)
С2 = b1 / sinα+ b2ctgα, (2.4.8)
где b1, b2 – расстояние от оси дороги 1, оси дороги 2 до оси ПСП (рис.2.4.2).
На транспортной развязке «клеверный лист» оси полос торможения и разгона пересекаются в четырех точках P1,P2,P3 и P4. Схема смещения этих точек относительно точки О пересечения осей дорог приведена на рисунке 2.4.2.

Рис.2.4.2. Схема смещения точек Pi пересечения осей ПСП относительно точки О пересечения осей дорог:
1, 2 – оси дорог; 3, 4 – оси ПСП.
Величины смещений С1(Pi) вычисляют по формуле (2.4.7), смещений С2 (Pi) по формуле (2.4.8):
С1(Pi) = b2 / sinα+ b1ctgα; (2.4.7)
С2 (Pi)= b1 / sinα+ b2ctgα, (2.4.8)
где b1, b2 – расстояниеотоси дороги 1, оси дороги 2 до оси ПСП (рис.2.4.2).
В формулах (2.4.7, 2.4.8) угол пересечения осей переходно-скоростных полос (ПСП) принимается равным острому углу α для точек P1, P3 и углу (180 – α) для точек P2,P4.
Результаты вычислений смещений С1(Pi) и С2(Pi) представляют в табличной форме (см. таб. 2.4.2).
Расстояние РА от точки пересечения осей 3 и 4 ПСП, сопрягаемых ЛПО, до начала плана трассы ЛПО определим из схемы (рис.2.4.3):
РА = Рn + nf – Хв; РА = Рn + R·sinβ– Хв. (2.4.9)
Расстояние Pn является катетом прямоугольного треугольника PnO1, в котором известен только угол α. Второй катет этого треугольника nO1 (рис. 2.4.3) определяется по формуле:
nO1 = mO1 + nm = R·cosβ + Ув.

Рис. 2.4.3. Схема к определению величин РА и РО1: 3,4 – оси переходно-скоростных полос (ПСП).
Величина катета Pn равна:
Pn = nO1 ·ctg(α/2) = (R·cosβ+ Ув.)·ctg(α/2) .
Подставим значение Pn в формулу (2.4.9):
РА=(R·cosβ+ Ув) ctg(α/2) + R·sinβ – Xв, (2.4.10)
где Xв, Ув – координаты конца переходной кривой, вычисляются по формулам (2.4.4) и (2.4.5).
Расстояние РО1 (см. рис. 2.4.3) до центра круговой кривой определяется по формуле:
РО1=(R·cosβ+ Ув)/sin(α/2), (2.4.11)
На транспортной развязке «клеверный лист» проектируют 4 левоповортных соединительных ответвления ЛПО1, ЛПО2, ЛПО3 и ЛПО4. Они начинаются в точках  ,
,  ,
,  ,
,  и заканчиваются в точках
и заканчиваются в точках  ,
,  ,
,  . Точки
. Точки  и
и  расположены на расстоянии
расположены на расстоянии  от точки
от точки  пересечения осей ПСП.
пересечения осей ПСП.
При симметричном расположении плана трассы ЛПО по типу 1 относительно биссектрисы угла пересечения дорог величина  (рис. 2.4.3). Также поэтому принимают
(рис. 2.4.3). Также поэтому принимают  =
=  и
и 
 =
= 
 .Величины и вычисляют по формуле (2.4.11). В формуле (2.4.11) угол пересечения осей дорог принимается равным острому углу α для точек P1, P3 и углу (180 – α) для точек P2,P4.
.Величины и вычисляют по формуле (2.4.11). В формуле (2.4.11) угол пересечения осей дорог принимается равным острому углу α для точек P1, P3 и углу (180 – α) для точек P2,P4.
Результаты вычислений  и
и  на ЛПО по типу 1 рекомендуется оформлять в виде таблицы (см. таб. 2.4.3).
на ЛПО по типу 1 рекомендуется оформлять в виде таблицы (см. таб. 2.4.3).
2.4.2. Проектирование плана трассы ЛПО по типу 2.
План трассы ЛПО по типу 2 включает закругления малого радиуса ABCD, A'B'C'D' и отрезок прямой П (П≥0) (рис.2.4.4).
Трасса ЛПО по типу 2 начинается в точке А на расстоянии РA от точки пересечения осей ПСП и заканчивается в точке А' на расстоянииPA'.

Рис.2.4.4. Схема к определению пикетного положения основных точек плана трассы ЛПО по типу 2:
1,2 – оси пересекающихся дорог; 3,4 – оси переходно-скоростных полос (ПСП).
Закругление на ВУ1 состоит из переходных кривых AB и CD длиною L каждая, круговой кривой  радиуса R. Угол поворота трассы ЛПО
радиуса R. Угол поворота трассы ЛПО  =(180
=(180  -α/2). Угол
-α/2). Угол  , тангенс t и сдвижку p переходной кривой вычисляют по формулам (2.4.1, 2.4.2 и 2.4.3). Тангенс T и длину
, тангенс t и сдвижку p переходной кривой вычисляют по формулам (2.4.1, 2.4.2 и 2.4.3). Тангенс T и длину  круговой кривой определяют по (2.4.12).
круговой кривой определяют по (2.4.12).
T = (R + p)∙tg( /2);  = π∙R( -2
= π∙R( -2  ) /180 . (2.4.12)
) /180 . (2.4.12)
Домер закругления плана трассы ЛПО на ВУ1 равен:
Дм= 2(T + t) - (2L + ). (2.4.13)
Закругление на ВУ 2 аналогично закруглению на ВУ1. Его элементы вычисляют по приведенным выше формулам.
Расстояние РА должно быть не менее минимальной длины РAmin, при которой конец закругления на ВУ1 (рис.2.4.5, точка Д) совпадает с началом закругления на ВУ2.
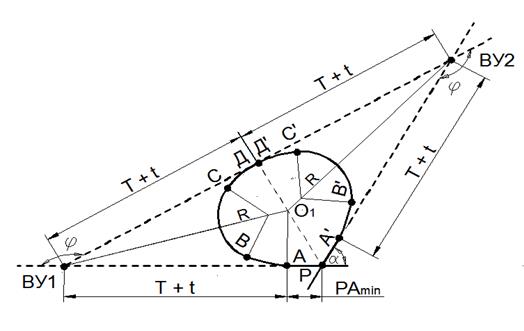
Рис.2.4.5. Схема плана трассы ЛПО по типу 2 без прямой вставки между закруглениями на ВУ1 и ВУ2.
Минимальное расстояние от Р до точек A и  (рис. 2.4.5) определяется по формулам (2.4.14):
(рис. 2.4.5) определяется по формулам (2.4.14):
РAmin = (T+t)∙tg(α/4)∙ctg(90-(α/2)); РA'min = РAmin, (2.4.14)
где T, t – тангенсы круговой и переходной кривых на ВУ1 и на ВУ2;
α – острый угол пересечения осей дорог 1 и 2.
Если полученное по расчету расстояние РA меньше РAпmin, то принимаем РA = РAmin.
Расстояние от точки Р пересечения осей ПСП до середины плана трассы ЛПО по типу 2 (рис.2.4.4) вычисляется по формуле.
РСО = (РA+T+t)∙(sin (α/2)). (2.4.15)
Пикетное положение основных точек ЛПО по типу 2 (рис. 2.4.4) в пикетаже ЛПО пределяются по формулам:
РКЛПО(А) = 0 +00; (2.4.16.1)
РКЛПО(В) = L; (2.4.16.2)
РКЛПО(С) = L + ; (2.4.16.3)
РКЛПО(Д) = L + +L (2.4.16.4)
РКЛПО(СО) = T +t + (РA+T + t)∙  -
-  ; (2.4.16.5)
; (2.4.16.5)
РКЛПО(A') =2(РA+T+ t)∙ +2(T + t)-2 ; (2.4.16.6)
РКЛПО(B')=РКЛПО(A')-L; (2.4.16.7)
РКЛПО(С')=РКЛПО(A')-L- ; (2.4.16.8)
РКЛПО(Д') = РКЛПО(A')-L- -L. (2.4.16.9)
где L, , T, t, - длина переходной и круговой кривой, тангенсы круговой и переходной кривых, домер закругления на ВУ1 и ВУ2,
РA – расстояние от точки Р пересечения осей ПСП до начала (конца) ЛПО, определяемое по методике изложенной в §2.4.3.
2.4.3. Определение положения начала и конца плана трассы ЛПО по типу 2.
Положение начала (т.  ) и конца (т.
) и конца (т.  ) ЛПО по типу 2 назначается:
) ЛПО по типу 2 назначается:
- по условию размещения трассы ЛПО вне путепровода;
- по условию обеспечения требуемой длины участка переплетения потоков;
- по условию проектирования пересечения дорог категории I со сквозным распределительным проездом или без сквозного распределительного проезда.
2.4.3.1. Определение положения начала плана трассы ЛПО по условию расположения трассы ЛПО вне путепровода.
На транспортных развязках проектируют чаще всего путепроводы разрезной балочной системы. Длина путепровода принимается по оси дороги, проходящей в верхнем уровне (рис.2.4.6).
Расстояние от точки пересечения осей дорог 1 и 2 до начала и конца путепровода по оси ПСП соседних ЛПО вычисляется по формуле (2.4.17):
 = 0,5 Lпут + bm ∙ctgαi, (2.4.17)
= 0,5 Lпут + bm ∙ctgαi, (2.4.17)
где Lпут – длина путепровода;
bm – расстояние от оси дороги номер m, проходящей в верхнем уровне, до оси ПСП;
αi– угол пресечения осей дорог.

Рис. 2.4.6. Схема расположения начала и конца трассы ЛПО:
1,2 – оси пересекающихся дорог; 3.4 – оси переходно-скоростных полос (ПСП); 5 – путепровод.
Для размещения путепровода на прямом участке дороги необходимо, чтобы начало и конец путепровода располагались до начала ЛПО или после конца ЛПО.
Условия расположения трассы ЛПО вне путепровода приведены в формулах (2.4.18). Применительно к схеме, представленной на рисунке 2.4.6, эти условия имеют вид (2.4.18а) и (2.4.18б):
 ≥ (lпi-
≥ (lпi-  (
( )); (2.4.18)
)); (2.4.18)
 ≥ (lп1-
≥ (lп1-  (
( )); (2.4.18а)
)); (2.4.18а)
 ≥ (lп2- (
≥ (lп2- ( )), (2.4.18б)
)), (2.4.18б)
где  - расстояние от точки пересечения осей ПСП до начала (конца) трассы ЛПО, определяется по формуле (2.4.10);
- расстояние от точки пересечения осей ПСП до начала (конца) трассы ЛПО, определяется по формуле (2.4.10);
lпi- (см. (2.4.17));
()- расстояние от точки пересечения осей дорог 1 и 2 до точек пересечения осей ПСП, определяется по формулам (2.4.7) и (2.4.8).
В формуле (2.4.18) индексы i соответствуют номеру ЛПО, индексы m соответствует номеру дороги, проходящей в верхнем уровне.
Условия (2.4.18) проверяют в двух соседних ЛПО по типу 1 (ЛПО1 и ЛПО2 или ЛПО3 и ЛПО4). При проверке условий (2.4.18) возможны следующие случаи.
Случай 1. Условия (2.4.18) выполнены на двух соседних ЛПО (рис.2.4.7.а).
Путепровод располагается вне трассы всех ЛПО по типу 1. Значение расстояний  (i=1,2,3,4), полученное ранее (таб.2.4.3) оставляют без изменения.
(i=1,2,3,4), полученное ранее (таб.2.4.3) оставляют без изменения.
Определяют положение начала плана трассы ЛПО по условию размещения переходно-скоростной полосы на участке переплетения потоков(§2.4.3.2) или по условию проектирования пересечения дорог категории I со сквозным распределительным проездом или без него (§2.4.3.3).
а) б)
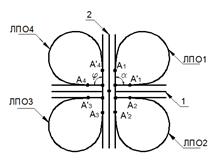
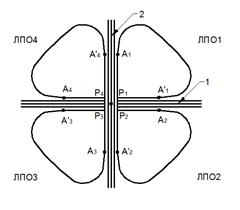
Рис.2.4.7. Схема трассы ЛПО: а) – по типу 1; б) – по типу 2.
Случай 2. Условия (2.4.18) не выполнено на соседних ЛПО по типу 1. План трассы всех ЛПО проектируют по типу 2 (рис.2.4.7.б) по методике, изложенной в §2.4.2.
Предварительно определяется положение начала и конца ЛПО по типу 2 по условию (2.4.18) размещения их в начале (конце) путепровода по формуле:
 lпi- ();
lпi- ();
где , lпi, ()- см. (2.4.18).
Определяют положение начала плана трассы ЛПО по условию размещения переходно-скоростной полосы на участке переплетения потоков (§2.4.3.2) или по условию проектирования пересечения дорог категории I со сквозным распределительным проездом или без него (§2.4.3.3).
Результаты вычислений и рекомендуется оформлять в виде таблицы (см. таб. 2.4.3.).
Случай 3. Условие (2.4.18) выполнено на ЛПО1 и не выполнено на соседнем ЛПО2 (рис.2.4.8).

Рис.2.4.8. Схема плана трассы ЛПО1 и ЛПО3 по типу 1, ЛПО2 и ЛПО4 по типу 2: 1,2 – оси дорог 1 и 2.
План трассы ЛПО1 и ЛПО3 продолжают проектировать по методике для ЛПО по типу 1, изложенной в §2.4.1. Значение расстояний (i=1,3), полученное ранее (таб.2.4.2) оставляют без изменения.
План трассы ЛПО2 и ЛПО4 проектируют по типу 2 по методике, изложенной в §2.4.2. Предварительно определяется положение начала и конца ЛПО2 и ЛПО4 по типу 2 по условию (2.4.18) размещения их в начале (конце) путепровода по формуле:
lпi- (),
где , lпi, ()- см. (2.4.18).
Полученное значение сравнивают с РAmin определенным по формуле (2.4.14) и принимают большее значение.
Определяют положение начала плана трассы ЛПО по условию размещения переходно-скоростной полосы на участке переплетения потоков (§2.4.3.2) или по условию проектирования пересечения дорог категории I со сквозным распределительным проездом или без него (§2.4.3.3).
Результаты вычислений и рекомендуется оформлять в виде таблицы (см. таб. 2.4.3).
2.4.3.2.Определение положения начала и конца плана трассы ЛПО по условию обеспечения требуемой длины участка переплетения потоков.
На транспортной развязке «клеверный лист» на участке между двумя смежными ЛПО (рис.2.5.3) происходит переплетение потоков транспорта, выходящего с ЛПО1 и примыкающего к полосе основной проезжей части и потоков транспорта, отмыкающего от полосы основной проезжей части и въезжающего на ЛПО4. На каждой пересекающейся дороге имеются два участка переплетения (правый и левый). Если параметры ЛПО по типу1 или по типу 2 одинаковы, то правый и левый участки переплетения на дороге 1 или на дороге 2 имеют одинаковую длину.
Длина участка переплетения Sп (рис.2.5.3) равна расстоянию между точками схождения кромок проезжих частей ЛПО и соседней полосы дороги или полосы сквозного распределительного проезда и точками расхождения этих кромок:
Sпm = Xn'+SАm+Xn, (2.4.19)
где X n', Xn '- расстояние от конца или начала ЛПО до точек расхождения кромок проезжих частей ЛПО и соседней полосы или до точек схождения этих кромок определяется по формуле (2.5.9);
SАm - расстояние между положением начала и конца смежных ЛПО на правой или на левой стороне дороги m (m = 1,2).
На транспортной развязке «клеверный лист» полосы разгона и торможения объединяют в общую полосу на участке переплетения. Длина этой полосы должна быть достаточной для размещения переходно-скоростных полос.
SАm ≥ Sрm, (2.4.20)
где Sрm- длина полосы разгона на дороге m (m=1,2), которая определяется по методике, изложенной в подразделе §2.5.1.
В случае, если расчетная скорость на ЛПО 40км/ч и уклон продольного профиля на участке переплетения 15%0 длины полос торможения и разгона приведены в таблице 2.4.1.
Таблица 2.4.1.
Длина полос торможения и разгона в зоне ЛПО.
| Расчетная скорость на дороге, км/час
| Длина полос в зоне ЛПО
|
| Торможения
| Разгона
|
| 140
120
100
80
| 265
130
90
60
| 365
190
125
80
|
Рассмотрим пересечение дорог категории II и III с дорогой категории Iб, на которой сквозной распределительный проезд не предусмотрен (рис.2.4.8).
Расстояние между положением начала и конца смежных ЛПО на правой стороне дороги 1 вычислим по формуле (2.4.21) и на правой стороне дороги 2 вычислим по формуле (2.4.22):
SА1 =  +
+  +
+  (
( )
)  (
( +
+  ; (2.4.21)
; (2.4.21)
SА2 =  + (
+ ( )+ (
)+ ( +
+  . (2.4.22)
. (2.4.22)
Проверим условие (2.4.20) для дороги 1 и дороги 2.
Если условия выполняются для каждой дороги, то полученные ранее значения  (см. таблица 2.4.3 строка 2) остаются без изменений.
(см. таблица 2.4.3 строка 2) остаются без изменений.
Если это условие не выполняется для дороги m, то примем SАm = Sрm, а для второй дороги оставим ранее полученное.
Если это условие не выполняется для обеих дорог, то примем SА1 = Sр1 и SА2 = Sр2.
Параметры ЛПО1 и ЛПО3 по типу 1 оставим без изменения. Для ЛПО2 и ЛПО4 вычислим расстояние до начала ЛПО2 на дороге номер 2 и расстояние до конца ЛПО2 на дороге номер 1.
= Sр2- ( + ()+ ( ); (2.4.23)
=Sр1 - ( + () ( + ()). (2.4.24)
Примем  =
=  и
и  = .
= .
Определяют положение начала плана трассы ЛПО по условию проектирования пересечения дорог категории I со сквозным распределительным проездом или без него (§2.4.3.3).
Далее вычисляем пикетные положения начала и конца ЛПО (формула 2.4.27).
В формуле (2.4.27) расстояние  =
=  i, если радиусы круговых кривых на ВУ1 и на ВУ2 одинаковы. Если на ВУ2 радиус R2 меньше, чем на R1 на ВУ1, то расстояние вычисляется по формуле:
i, если радиусы круговых кривых на ВУ1 и на ВУ2 одинаковы. Если на ВУ2 радиус R2 меньше, чем на R1 на ВУ1, то расстояние вычисляется по формуле:
= + T + t-T'-t', (2.4.25)
где i- см (2.4.23);
T, t, T', t' – тангенсы круговых и переходных кривых при радиусе R1 и R2, определяются по формулам (2.4.12), (2.4.2).





