Определение положения точки в пространстве.Вектор перемещения.
Определение положения точки в пространстве.
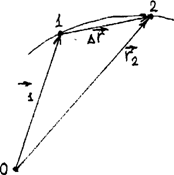
Для описания движения точки, т.е. изменения ее положения с течением времени, прежде всего, надо в любой момент времени указать ее местоположение координатным или векторным способом. Оба способа задания положения тела в пространстве эквивалентны, т.е. зная координаты точки, можно указать ее радиус-вектор, и наоборот. Из рис. 1 видно, что радиус-вектор представить можно

диагональю прямоугольного параллелепипеда со сторонами, численно равными координатам точки Х
а, Y
a и Z
a. Отсюда очевидна связь модуля радиус-вектора точки с ее координатами:


Для определения направления радиус-вектора в пространстве можно определить углы a, b, g, которые радиус-вектор образует с координатными осями OX, OY, и OZ соответственно. Тогда:

Таким образом, зная координаты точки, можно определить величину (1) радиус-вектора, и его направление в пространстве по так называемым направляющим косинусам (2), (3) и (4).
При движении точки ее координаты и радиус-вектор с течением времени изменяются, для определения характеристик движения вводят три вектора: перемещения, скорости и ускорения.
Вектор перемещения.

Для определения перемещения точки в пространстве вводят вектор перемещения.




 Например, за промежуток времени Dt точка перемещается из положения 1 в положение 2 (рис. 2), определяемые векторным способом указанием радиус-векторов и; вектором перемещения называют вектор, проведенный из начального положения 1 в конечное 2 перемещаемого тела. Из векторного треугольника видно, что вектор перемещения равен приращению радиус-вектора точки. Наряду с изменением радиус-вектора точки происходит изменение ее координат, т.е. перемещение точки вдоль отдельных координатных направлений. Из рис.3 видно, что
Например, за промежуток времени Dt точка перемещается из положения 1 в положение 2 (рис. 2), определяемые векторным способом указанием радиус-векторов и; вектором перемещения называют вектор, проведенный из начального положения 1 в конечное 2 перемещаемого тела. Из векторного треугольника видно, что вектор перемещения равен приращению радиус-вектора точки. Наряду с изменением радиус-вектора точки происходит изменение ее координат, т.е. перемещение точки вдоль отдельных координатных направлений. Из рис.3 видно, что


Вектор перемещения за конечный промежуток времени в общем случае не совпадает с направлением движения (направлением касательной к траектории движения). Очевидно, что эти направления будут совпадать в общем случае движения только для бесконечно малых перемещений точки.
Вектор скорости. Вектор ускорения. Тангенциальное и нормальное ускорение
Вектор скорости.
Вектором скорости называют вектор, определяющий быстроту и направление движения.

Вектором средней скорости называют отношение вектора перемещения к промежутку времени, за который это перемещение происходит:
Так как в произвольном случае движения вектор перемещения за конечный промежуток времени не определяет точно направление движения, это не может сделать и вектор средней скорости. Следовательно, необходимо рассматривать перемещения за бесконечно малые промежутки времени.

Вектором истинной (мгновенной) скорости называют предел, к которому стремится значение вектора средней скорости при бесконечном убывании промежутка времени:
Так как при движении тела в общем случае изменяются все три его координаты, часто бывает удобным рассматривать скорость движения точки вдоль отдельных координатных направлений (компоненты или составляющие вектора скорости). Компоненты средней скорости равны:



Компоненты же мгновенной скорости определяются как
Вектор скорости с его компонентами связан такими же по виду соотношениями, как радиус-вектор с
 координатами точек:
координатами точек:
 Вектор ускорения.
Вектор ускорения.
Вектором ускорения называют вектор, определяющий быстроту и направление изменения вектора скорости. Аналогично определениям для вектора скорости вводятся понятия среднего и мгновенного
 ускорения:
ускорения:
При движении точки по произвольной траектории вектор изменения скорости ΔJ и, следовательно, вектор ускорения направлены в сторону вогнутости траектории независимо от того, увеличивается или уменьшается величина скорости (рис. 4, 5):

Рис. 4. Ускоренное движение Рис. 5. Замедленное движение
Как видно из рисунков, в обоих случаях вектор dJ направлен в сторону вогнутости траектории. При ускоренном движении он отклоняется в сторону движения, при замедленном - в противоположную
(продолжение) 2.Вектор скорости. Вектор ускорения. Тангенциальное и нормальное ускорение
Для определения мгновенного ускорения надо рассматривать бесконечно малые перемещения, т.е. векторы скорости J1 и J2 в соседних точках траектории. Поэтому вектор ускорения лежит в плоскости, содержащей касательную к траектории в данной точке и прямую, параллельную касательной в соседней точке траектории. Такая плоскость называется соприкасающейся. Поэтому наряду с представлением вектора ускорения компонентами
можно рассматривать составляющие вектора в соприкасающейся плоскости (т.е. только две компоненты). Для определения этих составляющих в любой точке траектории проводят соприкасавшуюся плоскость и в ней две оси - нормальную On. в сторону вогнутости траектории и касательную Ot по касательной к траектории. Изменение скорости и, соответственно, ускорение можно рассматривать в проекциях на эти оси (рис. 6).
Двигаясь вдоль траектории, за промежуток времени Dt точка проходит путь DS скорость ее изменяется отJ до J1, при этом J1 составляет угол Da (альфа) с осью Ot. По определению мгновенного ускорения:
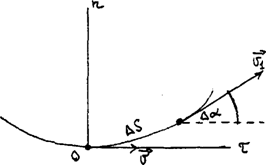
рис.6
Преобразуем выражение предела, умножив и разделив его наDa и DS:
Отметим, что при Dt=0 бесконечно убывает и пройденный путь, и угол (DS=0, Da=0). При этом условии значения пределов равны:
Предел же называется кривизной траектории К. Кривизна траектории обратно
 пропорциональна радиусу кривизны траектории:
пропорциональна радиусу кривизны траектории:
( продолжение2) 2.Вектор скорости. Вектор ускорения. Тангенциальное и нормальное ускорение
 С учетом этих замечаний выражение для нормальной составляющей вектора ускорения принимает вид
С учетом этих замечаний выражение для нормальной составляющей вектора ускорения принимает вид
Для выяснения физического смысла ускорения рассмотрим два частных случая движения.
Равномерное криволинейное движение (V=const, k<>0). В этом случае, как видно из (14) и
(16),
Неравномерное прямолинейное движение (V<>соnst, K=0). При таком движении
Следовательно, касательная составляющая ускорения определяет изменение вектора скорости по величине, а нормальная - по направлению.
Кинематика твердого тела.
Для нахождения кинематического закона движения, т.е. r=r(t) или х = х(t), у=y(t), z=z(t) надо найти закон движения каждой точки тела, т.е. решить бесконечно большое число уравнений, что сопряжено с непреодолимыми математическими трудностями.
Однако особенности самого твердого тела и особенности его движения могут значительно упростить задачу.
Число степеней свободы.
Числом степеней свободы называют число независимых механических координат полностью и однозначно определяющих положение тела в пространстве. Или: число независимых механических движений, которые одновременно может совершать тело.
Из таких определений следует, что число степеней свободы для свободной материальной точки равно 3. Для совокупности из n невзаимодействующих между собой точек число степеней свободы равно 3n.
Любые связи (взаимодействия) ограничивают число степеней свободы. Например, точка двигается по поверхности, задаваемой уравнением F(x,y,z)=0. В этом случае необходимо задать независимо 2 координаты, третья же не является независимой - она определяется из уравнения поверхности, по которой движется точка. Иначе говоря, для точки, движущейся по поверхности, число степеней свободы равно 2. Для точки, движущейся вдоль линии, число степеней свободы равно 1. Действительно, любую линию можно пересечением двух поверхностей, т.е. для определения положения точки в пространстве нужно указать независимо только одну координату, две другие же определяются из уравнения линии.
Рассмотрим теперь систему точек, связанных жесткими связями. Пусть таких точек 2 (рис. 7). Для определения положения одной из точек системы в пространстве нужно указать 3 координаты, т.е. эта часть системы обладает 3-мя степенями свободы. Если эту точку закрепить неподвижно, у системы будет отнято 3 степени свободы. Вторая точка при этом может двигаться только по поверхности сферы, т.е. обладает 2-мя степенями свободы. Следовательно, вся система обладает 5-ю степенями свободы.


Рис. 7 Рис. 8
Аналогично определяется число степеней свободы для системы, состоящей из трех жестко связанных между собой точек (рис. 8). Если одну из точек системы закрепить, у системы отнимается 3 степени свободы При закреплении второй точки дополнительно отнимается еще а степени свободы При этом третья точка сможет двигаться только вдоль линии, т.е. обладает одной степенью свободы.поэтому вся система обладает 6-ю степенями свободы. Легко убедиться» что добавляя к такой системе 4-ю, 5-ю и т.д. точки, мы не увеличим число степеней свободы, т.е. максимальное число степеней свободы для системы жестко связанных между собой точек равно. Абсолютно твердое тело как раз представляет собой такую систему, следовательно, обладает 6-ю степенями свободы.
(продолжение)2.Кинематика твердого тела. Число степеней свободы. Поступательное движение твердого тела.
Основной закон динамики
Постулаты Эйнштейна.
В основе специальной теории относительности, прежде всего, лежит факт постоянства скорости света в различных системах отсчета, что противоречит классическому закону сложения скоростей. Кроме того, нет никаких оснований считать, что механическиеопьггы позволят отличить одну инициальную систему отсчета от другой. Это позволило Эйнштейну сформулировать исходные постулаты специальной теории относительности.
Постулат о постоянстве скорости света: скорость света в вакууме одинакова во всех инерциальных системах отсчета и не зависит от движения источника и приемника света.
Постулат относительности (общефизический принцип относительности): Никакими физическими опытами нельзя отличить одну инерциальную систему отсчета от другой. Наряду с этими постулатами Эйнштейн ввел принцип синхронизации часов, имеющий такое же значение в теории относительности, как и сформулированные выше постулаты.
Для того, чтобы одинаковые по устройству часы А и В (рис.31)
 шли одинаково, необходимо их синхронизировать. Пусть в момент времени, отсчитанный по часам А, в том месте, где они находятся, осуществляется световая вспышка. Сигнал от нее достигает часов В, мгновенно отражается и поступает к часам А в момент времени, отсчитанный по ним. Часы А и В считаются синхронизированными, если в момент отражения сигнала в т. В показания часов равны:
шли одинаково, необходимо их синхронизировать. Пусть в момент времени, отсчитанный по часам А, в том месте, где они находятся, осуществляется световая вспышка. Сигнал от нее достигает часов В, мгновенно отражается и поступает к часам А в момент времени, отсчитанный по ним. Часы А и В считаются синхронизированными, если в момент отражения сигнала в т. В показания часов равны:

По сути дела в принципе синхронизации постулируется утверждение, что прямой и отраженный сигналы движутся с одинаковой скоростью, а само отражение происходит мгновенно, что не следует из сформулированных ранее постулатов.
Исходя из указанных постулатов, можно получить все основные выводы специальной теории относительности.
17.(продолжение)Постулаты Эйнштейна. "Радиолокационный" метод (метод коэффициента "k ").
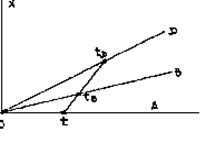
Движение тел можно графически представлять диаграммами x=x(t). В случае скоростей, сравнимых со скоростью света, масштаб х и t выбирается таким, что траектория светового сигнала ("световая линия") делит координатный угол пополам. Если же тело движется со скоростью, меньшей скорости света, угол наклона его траектории к оси t меньше 45°.
 Предположим, что две инерциальные системы отсчета А и В находятся в относительном движении. Систему А условно считаем неподвижной. В исходный момент времени системы полностью совпадали. В этот момент осуществляется синхронизация подвижных и неподвижных часов и на них устанавливаются нулевые показания. Далее система В удаляется от А со скоростью v<c (рис.32).
Предположим, что две инерциальные системы отсчета А и В находятся в относительном движении. Систему А условно считаем неподвижной. В исходный момент времени системы полностью совпадали. В этот момент осуществляется синхронизация подвижных и неподвижных часов и на них устанавливаются нулевые показания. Далее система В удаляется от А со скоростью v<c (рис.32).


 Затем в системе А производится вторая вспышка в момент времени t, измеренный по часам А. Сигнал от нее догоняет систему В в момент времени, измеренный по часам В в подвижной системе, а показания неподвижных часов А для этого события равны. Сигнал мгновенно отражается и приходит в систему А в момент времени, отсчитанный по часам А.
Затем в системе А производится вторая вспышка в момент времени t, измеренный по часам А. Сигнал от нее догоняет систему В в момент времени, измеренный по часам В в подвижной системе, а показания неподвижных часов А для этого события равны. Сигнал мгновенно отражается и приходит в систему А в момент времени, отсчитанный по часам А.
Предположим, что показания подвижных часов в момент отражения сигнала в k раз отличаются от показаний неподвижных часов t в момент посылки сигнала:
= kt (148)
Системы равноправны, поэтому с момента отражения неподвижной можно считать систему В, а систему А - подвижной. Тогда показания часов А в момент приема сигнала равны:
С момента синхронизации до отражения сигнала система В и световой сигнал, посланный в момент времени t (по часам А), проходят одинаковый путь:
 т.е.
т.е.
откуда получаем значение коэффициента k:
Следовательно, показания подвижных часов в момент приема сигнала всегда больше показаний неподвижных часов в момент посылки сигнала:
18.Замедление" хода времени. Относительная скорость.
"Замедление" хода времени.


 Рассмотрим на описанном выше примере промежуток времени между двумя событиями (синхронизация часов и отражение сигнала), измеренный по часам А и В. Поскольку в момент синхронизации показания обоих часов нулевые, то промежуток времени численно равен показаниям часов в момент отражения сигнала. Обозначив промежуток времени, измеренный по часам А и В, соответственно и, отношение этих показаний запишем в виде:
Рассмотрим на описанном выше примере промежуток времени между двумя событиями (синхронизация часов и отражение сигнала), измеренный по часам А и В. Поскольку в момент синхронизации показания обоих часов нулевые, то промежуток времени численно равен показаниям часов в момент отражения сигнала. Обозначив промежуток времени, измеренный по часам А и В, соответственно и, отношение этих показаний запишем в виде:
откуда:
Следовательно, промежуток времени между двумя событиями, измеренный подвижными часами, меньше результата того же измерения по неподвижным часам.
Относительная скорость.
 Предположим, что системы А, В и D находятся в относительном движении. В исходный момент все три системы совпадали. В этот момент производим синхронизацию всех часов и устанавливаем на них нулевые показания. Далее система В удаляется от А со скоростью v1, а система D - со скоростью v2 >v1. В момент времени t (пo часам А) в системе А производится световая вспышка, сигнал от которой достигает (рис.33)
Предположим, что системы А, В и D находятся в относительном движении. В исходный момент все три системы совпадали. В этот момент производим синхронизацию всех часов и устанавливаем на них нулевые показания. Далее система В удаляется от А со скоростью v1, а система D - со скоростью v2 >v1. В момент времени t (пo часам А) в системе А производится световая вспышка, сигнал от которой достигает (рис.33)
 системы В в момент tB =k1t (по часам В) и системы D в момент tD = k2t (по часам D ). При этом:
системы В в момент tB =k1t (по часам В) и системы D в момент tD = k2t (по часам D ). При этом:
 Теперь будем считать систему В неподвижной, а систему D - удаляющейся от B с относительной скоростью и. Тогда:
Теперь будем считать систему В неподвижной, а систему D - удаляющейся от B с относительной скоростью и. Тогда:
где:
Следовательно:
Откуда:
Это и есть выражение для относительной скорости
19.Сравнение поперечных размеров тел. Эффект "сокращения" длин.
Силы инерции.
Как уже отмечалось, существуют такие системы отсчета, в которых ускорение тел вызывается не только действием сил, но и самим движением системы отсчета.
Рассмотрим поведение свободного тела, находящегося в покое относительно неподвижной системы. В этой системе выполняются законы Ньютона: равнодействующая приложенных к телу сил равна нулю и тело, как следствие, находится в покое. Если же другая система отсчета движется относительно первой с ускорением a, то в подвижной системе тело получает ускорение - а, равное по величине ускорению системы и противоположно ему направленное. Следовательно, в подвижной системе законы Ньютона не выполняются: равнодействующая приложенных сил равна нулю, а тело приобретаетускорение.
 Чтобы и в таких системах выполнялись законы Ньютона, приходится вводить дополнительные фиктивные силы, называемые силами инерции. В рассмотренном примере в подвижной системе вводится сила инерции:
Чтобы и в таких системах выполнялись законы Ньютона, приходится вводить дополнительные фиктивные силы, называемые силами инерции. В рассмотренном примере в подвижной системе вводится сила инерции:
объясняющая появление ускорения тепа в подвижной системе отсчета. Т.е. сила инерции равна произведению массы тела на ускорение системы и противоположно ему направлена.
Если связать систему отсчета с ускоренно движущимся телом, то геометрическая сумма всех сил, приложенных к телу, включая силу инерции, равна нулю (принцип Даламбера)
.
Силы инерции Кориолиса.
Пусть система вращается равномерно с угловой скоростью ω. Вдоль радиуса системы равномерно со скоростью v движется тело (рис. 36).
 Абсолютный импульс тела определяется относительным и переносным движением
Абсолютный импульс тела определяется относительным и переносным движением
Со временем будут изменяться обе составляющие абсолютного импульса. Рассмотрим сначала изменение относительного импульса.

 Поскольку тело движется равномерно относительно подвижной системы, будет изменяться только направление импульса. За промежуток времени система (и ее радиус) поворачивается на угол Dj = wDt (рис. 37).
Поскольку тело движется равномерно относительно подвижной системы, будет изменяться только направление импульса. За промежуток времени система (и ее радиус) поворачивается на угол Dj = wDt (рис. 37).
При малых углах поворота вращение относительного импульса равно:179

Направлено это изменение в сторону вращения перпендикулярно к радиусу. Переносный импульс направлен все время в сторону вращения перпендикулярно к радиусу, величина его, пропорциональная линейной скорости вращения системы, зависит от удаления от центра вращения (рис.38)
Изменение величины переносного импульса за время dt равно
Как видно, изменения относительного и переносного импульсов одинаковы по величине и направлению, поэтому полное изменение импульса тела равно
(продолжение 2) 22.Неинерциальные системы отсчёта. Силы инерции. Силы инерции во вращающихся системах отсчета. Силы инерции Кориолиса
С другой стороны, из основного закона динамики следует:
где F - равнодействующая приложенных к телу сил.
Таким образом, наблюдаемые изменения импульса вызываются внешними силами, равными по величине:
 F=2mnw
F=2mnw


Учитывая направления (рис. 39) векторов в векторном виде можно записать



Для рассмотренного случая движения на рис.40 представим все действующие на тело силы. Пусть стержень вращается равномерно в горизонтальной плоскости, вдоль него равномерно движется небольшая муфточка. Относительно неподвижного наблюдателя на тело должны действовать следующие силы (отмеченные на рисунке сплошными линиями). Т.к. тело движется в горизонтальной плоскости, сила тяжести уравновешена реакцией стержня. Поскольку траектория тела криволинейная, на него должна действовать центростремительная сила, обеспечивающая нормальное ускорение. Наконец, на тело действует рассмотренная выше сила, приложенная со стороны стержня.
В системе, связанной с вращающимся стержнем, тело движется равномерно и прямолинейно, т.е. сумма приложенных к нему сил должна быть равной нулю. Как видно из рисунка, в горизонтальной плоскости силы не уравновешены, поэтому необходимо для выполнения законов динамики ввести силы инерции (на рисунке показаны пунктиром). Вдоль стержня действует центробежная сила инерции, уравновешивающая центростремительную силу.
Силу уравновешивает сила инерции Кориолиса:
(184)
Как видно из (184), сила Кориолиса возникает во вращающейся системе отсчета при относительном движении тел. Исключением является движение тела вдоль оси вращения системы - силы инерции Кориолиса в этом случае не возникают.
Силы трения скольжения.

Сухим (внешним) трением называют силы сопротивления движению, возникающие при относительном движении одного твердого тела по поверхности другого. Силы сопротивления движению определяются наличием микро- и макронеровностей поверхностей трущихся тел и взаимодействием между ними. При скольжении одной твердой поверхности по другой в плоскости соприкосновения тел возникают силы, направленные противоположно относительной скорости. Эти силы и называют силами трения скольжения. Основные законы и закономерности для сил трения скольжения получены опытным путем. Закон Кулона определяет величину сил трения скольжения:
где: F тр - сила трения скольжения, N - нормальная составляющая реакции поверхности, k -коэффициент трения скольжения.
Коэффициент трения скольжения k является безразмерной величиной и определяется природой и состоянием поверхностей трущихся тел.
Кроме закона Кулона опытным путем установлен ряд закономерностей для трения скольжения среди которых наиболее часто употребляются следующие:
1. При попытке сдвинуть одно тело по поверхности другого в плоскости контакта возникают силы, сопротивления, изменяющиеся от нуля до предельного значения, называемого силой трения покоя.
2. С увеличением относительной скорости трущихся тел силы - трения сначала убывает, а затем начинают возрастать.
3. Силы трения тем меньше, чем тверже трущиеся поверхности.
Силы трения качения.
Трение качения возникает при качении одного твердого тела по поверхности другого. При попытке сдвинуть тело по поверхности другого в плоскости соприкосновения возникает
 сила препятствующая этому (рис. 43).
сила препятствующая этому (рис. 43).
Упругие силы.
Упругостью называют свойство восстанавливать времменно утраченную форму и объём, а деформациями- само изменение формы и объёма тела. Причиной упругости является наличие одновременно присутствующих сил взаимодействия между частицами тела- притяжения ( ) и отталкивания (
) и отталкивания ( ). Равнодействующая этих сил равна:
). Равнодействующая этих сил равна:

 (200)
(200)
На рис.46 представлены графики силы взаимного отталкивания (1), притяжения (2) и равнодействующая этих сил (3). На расстоянии  между взаимодействующими частицами равнодействующая равна нулю (положение равновесия). При
между взаимодействующими частицами равнодействующая равна нулю (положение равновесия). При  < преобладают силы отталкивания, а при > силы притяжения.
< преобладают силы отталкивания, а при > силы притяжения.
Потенциальная энергия взаимодействия на расстоянии между частицами:
 (201)
(201)
где:
 ,
,  .
.
Графики потенциальной энергии сил отталкивания (1), притяжения (2) и равнодействующей (3) представлены на рис.47:


Рис.46 Рис.47
(продолжение) 25.Упругиеие. Продольное сжатие и растяжение. Закон Гука
Деформация кручения.
Деформации кручения возникают при закручивании одного основания образца относительно другого. 
По закону Гука для этого типа деформации:ы
 (210)
(210)
где  - угол закручивания,
- угол закручивания,  - длинна образца,
- длинна образца,  - момент закручивающих сил,
- момент закручивающих сил,  - коэффициент кручения.
- коэффициент кручения.
(продолжение) 26.Деформация сдвига и кручения.
Величина  называется модулем кручения т. е.
называется модулем кручения т. е.
 (211)
(211)
Одновременно с закручиванием образца происходит сдвиг его слоёв. Угол сдвига  определяется из закона Гука.
определяется из закона Гука.
 (212)
(212)
Угол сдвига можно получить и из чисто геометрических соображений:
 (213)
(213)
Сравнивая (212) и (213), получим
 (214)
(214)
Момент распределённых сил, приложенных к нижнему основанию образца, получим, используя (214). 
Рис.51
Из рис.51 видно, что элементарный момент закручивающих сил, приложенных к элементу основания, равен:
 (215)
(215)
Полный момент:
 (216)
(216)
Сравнивая (210) и (216), получаем связь между модулями сдвига и кручения:

Закон всемирного тяготения.
Закон всемирного тяготения получен Ньютоном из наблюдений видимого движения планет Солнечной системы, используя законы динамики. В векторной форме закон всемирного тяготения, определяющий силы гравитационного взаимодействия, имеет вид:
 (218)
(218)
где - масса источника гравитационного поля,  - величина пробной массы,
- величина пробной массы,  -радиус-вектор точечной пробной массы относительно центра масс источника поля, - гравитационная постоянная.
-радиус-вектор точечной пробной массы относительно центра масс источника поля, - гравитационная постоянная.
Силовой характер поля источника является сила, действующая на единичную пробную массу, помещённую в данную точку поля. Эта величина называется напряжённостью поля:

(219)
Следует отметить, что закон всемирного тяготения справедлив только для точечных взаимодействующих масс. Кроме того, массы тел, фигурирующие в законе всемирного тяготения, имею другой смысл, нежели в законах динамики. Это –“тяготеющие”,”тяжёлые” или ”гравитационные” массы.
Работа силы тяжести.

Рис.54
Пусть тело под действием силы тяжести скользит по наклонной поверхности произвольной формы (рис.54.) работа нормальной реакции по (235) равна нулю, поэтому при отсутствии трения работу совершает только сила тяжести. На элементарном перемещении работа  силы равна:
силы равна:  (237)
(237)
Следовательно, на конечном перемещении работа сил тяжести не зависит от формы траектории и равна: 
где:  перемещение тела по вертикали.
перемещение тела по вертикали.
(продолжение)29.Работа и энергия. Работа силы тяжести. Работа упругих сил
Работа упругих сил.
На гладкой горизонтальной плоскости находится тело, скрепленное пружиной жесткости  с вертикальной стенкой (рис.55).
с вертикальной стенкой (рис.55).

Рис.55
Если под действие внешней силы  пружина растягивается на
пружина растягивается на  , возникает сила упругости пружины, равная в пределах упругих деформаций
, возникает сила упругости пружины, равная в пределах упругих деформаций  . Элементарная работа упругих сил по перемещению тела из этого положения на
. Элементарная работа упругих сил по перемещению тела из этого положения на  равна:
равна:

Работа же силы на конечном перемещении:
 (238)
(238)
где – растяжение (удлинение) пружины.
Потенциальная энергия.
Потенциальной энергией называют энергию, определяемую конфигурацией системы, относительным расположением отдельных взаимодействующих тел. выражение для потенциальной энергии для произвольного взаимодействия записать сложно, обычно определяют ее изменение относительно уровня, условно принятого за нулевой.например, потенциальная энергия тела массы m в поле тяготения Земли, находящегося на высоте h над ее поверхностью: 
а на поверхности: 
Изменение потенциальной энергии тела относительно поверхности Земли:
 (225)
(225)
При 
|
|
|