Язык FBD. Структура программы, основные элементы и правила программирования. Библиотека функциональных блоков (ФБ) системы Quantum
FBD (Function Block Diagram) – язык функциональных блоковых диаграмм, с помощью которого программа представляется из различных функциональных блоков. Язык удобен для программирования задач, например вычислительного характера, решение которых может быть представлено функциональной схемой, состоящий из таких блоков как сложение, умножение, интегрирование и т.д.
Язык FBD позволяет пользователю строить сложные процедуры обработки данных и управления объектами. В языке используются существующие библиотеки функций (логических, арифметических, ввода/вывода) и связывание их в функциональную схему или диаграмму решает поставленную задачу.
Позволяет использовать сложные алгоритмы простым вызовом функций и функциональных блоков. Имеет большую библиотеку блоков для управления непрерывным динамическим процессам.
При программировании задач логического управления FBD заимствует символику булевой алгебры и, как булевы символы имеют входы и выходы, которые могут быть соединены между собой, FBD более эффективен для представления структурной информации, чем язык релейно-контактных схем.
Диаграмма FBD описывает программу определяющую взаимосвязь между входными и выходными переменными. Программа представляет собой набор стандартных элементарных функциональных блоков, имеющихся в библиотеке Quantum.
 Элементарный блок представляется одиночным прямоугольником. Элементарный блок реализует одну функцию между входами и выходами. Имя функции, реализуемой блоком, пишется на символе прямоугольника. Входы соединяются с левым краем. Выходы соединяются с правым краем.
Элементарный блок представляется одиночным прямоугольником. Элементарный блок реализует одну функцию между входами и выходами. Имя функции, реализуемой блоком, пишется на символе прямоугольника. Входы соединяются с левым краем. Выходы соединяются с правым краем.
Входом блока может быть:
· входная переменная;
· выходная переменная.
· внутренняя переменная;
· константа;
Выходом блока может быть:
· внутренняя переменная; выходная переменная.
Входные и выходные переменные присоединяются к блоку линиями соединения. Левые и правые части линии соединения должны иметь тот же самый тип переменной. Выход блока может быть присоединена к входу любого другого блока.
 Способы подключения блоков FBD
Способы подключения блоков FBD
Прямое подключение
Инверсное подключение
Множественные подключения
Множественные подключения используются для широковещательной передачи информации от левого края до каждого правого края.
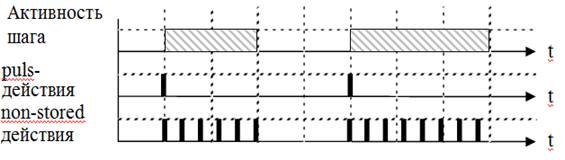
Булевы действия
Они присваивают булевой переменной значение активности шага. Булева переменная может быть выходной или внутренней. Ей присваивают значение каждый раз, когда активные шаги начинаются или заканчиваются. Синтаксис основных булевых действий и соответствующие им временные диаграммы приведены ниже.
<boolean_variable>(N); присваивает переменной сигнал активности шага;
<boolean_variable>; тот же самый эффект (атрибут N является необязательным);
/<boolean_variable>; присваивает переменной отрицание сигнала активности шага;
<boolean_variable>(S); устанавливает переменную в 1, когда сигнал активности шага 1
 <boolean_variable>(R); сбрасывает переменную в FALSE, когда сигнал активности шага становится TRUE.
<boolean_variable>(R); сбрасывает переменную в FALSE, когда сигнал активности шага становится TRUE.
Puls-действия
Это список команд на языке ST или IL, которые выполняются только один раз в момент активизации шага
Синтаксис:
ACTION(P):
Операторы языка ST или IL; END_ACTION;
Non-stored-действия
Это список команд на языке ST или IL, которые выполняются на каждом цикле работы контроллера в течение всего периода активности шага (рисунок 4).
Синтаксис описания Non-stored-действия: ACTION(N):
Операторы языка ST или IL; END_ACTION;
SFC действия
Это дочерняя последовательность на языке SFC, запускаемая или уничтожаемое в соответствии с изменением сигнала активности шага.
В отличии от макрошага, который пока не выполнится до конца, не происходит дальнейшего перехода, SFC-действие сразу прекращается при выполнении условия перехода.
SFC-действие может иметь один из следующих спецификаторов: N (“non-stored”), S (установки) или R (сброса).
Основные понятия теории автоматов. Автоматы Мили и Мура. Их аналитическое, табличное и графическое представление.
Абстрактный автомат – это математическая модель системы, обеспечивающая прием хранение и обработку информации.

Рис.1 Графическое изображение автомата
Х – множество, называемое входным алфавитом автомата;
Y - множество, называемое выходным алфавитом автомата;
Q – множество внутренних состояний автомата;
Для абстрактного автомата эти множества бесконечны. В реальных технических системах множества конечны, и автомат называется конечным.
Работа автомата заключается в следующем: на вход автомата подается послед-ность разрешенных входных значений, которые преобразуются в набор внутренних состояний. На выходе автомат генерирует выходную последовательность, которая зависит от входных значений и от внутреннего состояния. Внутреннее состояние представляет из себя некоторую память о прошлом и устраняет из работы автомата понятие времени.
Математически понятия автомата можно представить следующим образом:
A=(X, Y, Q, φ, ψ, q0)
X, Y, Q – определены выше;
Ψ – функция переходов ψ: эта ф-ция ставит в соответствие входному множеству Q и X новое множество состояний команд

φ – функция выходов φ: преобразует внутреннее состояние и входной сигнал в выходной сигнал
q0 – начальное состояние автомата.
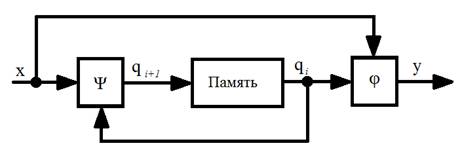
Рис. 2. Автомат Мили
Кроме автомата Мили существует автомат Мура у которых в отличие от автомата Мили выходные значения зависят только от внутреннего состояния.

Рис. 3. Автомат Мура
В теории автоматов функции φ и ψ обычно не представляют аналитически, т.е. в какой то определенной форме, а имеют табличную форму представления.
Детерминированный автомат – функции перехода и выходы определены для всех входных сигналов. Если некоторые варианты функции не определены до конца (отсутствуют), то автомат называется частично определенным или недетерминированым.
1. Детерминированный автомат Мили (φ, ψ)
| Текущее состояние, q
| Символы входного алфавита, х
|
| x1
| x2
| …
| xn
|
| q1
| q;y
| q;y
| …
| q;y
|
| q2
| q;y
| …
| …
| …
|
| …
| …
| …
| …
| …
|
| qm
| …
| …
| …
| …
|
2. Недетерминированный автомат Мили (φ, ψ)
| Текущее состояние, q
| Символы входного алфавита, х
|
| x1
| x2
| x3
| x4
|
| q1
| q2;y1;y2
| *;*
| *;*
|   q3;y1;y2 q3;y1;y2
|
| q2
| *;*
| q1;y1;y2
| *;*
|  q3;y1;y2 q3;y1;y2
|
| q3
| *;*
| *;*
| q4;y1;y2
| *;*
|
| q4
| q1;y1;y2
| *;*
| *;*
| *;*
|


3. Недетерминированный автомат Мура (φ, ψ)
| Текущее состояние, q
| Символы входного алфавита, х
| Символы выходного алфавита, ψ
|
| x1
| x2
| x3
| x4
|
| q1
| q2
| *
| *
| q3
| y1;y2
|
| q2
| *
| q1
| q4
| *
|  y1;y2 y1;y2
|
| q3
| *
| q4
| *
| *
|  y1;y2 y1;y2
|
| q4
| *
| *
| q1
| *
| y1;y2
|
Граф переходов, у которого в каждой вершине явно указаны значения каждой выходной переменной называется графом переходов с явным заданием всех выходных переменных, иначе граф переходов неявно задан.
Преимущества графа с явным заданием выходных переменных: простота понимания и простота внесения изменений; Граф переходов с неявным заданием переменных плохо читаемы и более сложны для понимания, но при физической реализации более экономично используют память программы.
Основные операции контроля.
При контроле технического состояния параметров и качества продукции обычно требуется выполнение следующих операций.

X1…Xn - наблюдаются с помощью сенсоров или датчиков параметры технологического объекта или процесса.
1-первичная обработка данных, полученных с датчиков, т.е. фильтрация от помех, линеаризация характеристик и т.п..
2-формирование контролируемых величин Z с помощью вычислительных операций и других вспомогательных операций, обычно используемых при косвенном определении параметров.
3-формирование результата контроля с помощью соответствующего алгоритма контроля, классифицирующего состояние объекта или процесса на несколько непересекающихся множеств. Обычно используются два множества  и
и  .
.
Алгоритмы контроля обычно требуют выполнение логических операций сравнения.
К числу принципиальных вопросов контроля для автоматизации относятся выбор частоты контроля параметров и алгоритмов контроля.
1. Определение частоты контроля параметров.
В реальных условиях системы автоматизации не всегда возможно или целесообразно измерять контролируемые параметры непрерывно, в связи с этим все параметры обычно делят на две группы:
1) параметры, которые могут оказать влияние на состояние объекта или процесса своими мгновенными значениями, например: загазованность помещения, температура подшипников насосных агрегатов и т.д.;
2) параметры, кратковременные колебания которых не сказываются на состоянии или режиме работы объекта, такие параметры обычно контролируются по суммарному значению (количество жидкости), а также усреднённому значению на некотором интервале времени, например: средний расход жидкости, дебит скважины, технико-экономические показатели.
Параметры первой группы всегда желательно контролировать непрерывно. Если это невозможно, то требования все равно жесткие. Параметры второй группы целесообразно контролировать периодически.
2. Алгоритмы порогового (допускового) контроля.
В простейших наиболее распространенных случаях состояние объекта или процесса может контролироваться по одному или нескольким параметрам, для которых выделены области нормальных и анормальных, т.е. предаварийных и аварийных состояний. В этом случае основными алгоритмами контроля являются:
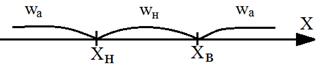 1) односторонний контроль
1) односторонний контроль

2) двусторонний контроль
 ,
,
где  и
и  - нижняя и верхняя уставки (пороги) параметра
- нижняя и верхняя уставки (пороги) параметра
Значение уставок и определяются технологическим требованием к нормальному режиму работы объекта. От правильности выбора этих уставок зависит эффективность контроля
3. Характеристики систем контроля.
Чтобы оценить качество автоматических систем контроля в частности, использующие алгоритмы порогового контроля используются следующие показатели:
| Состояние объекта
| Результат контроля
| Вероятность результата контроля
|

| 
| 
|
 -вероятность верного контроля
-вероятность верного контроля

 - вероятность «ложного» отказа
- вероятность «ложного» отказа
 -вероятность пропуска нарушения
-вероятность пропуска нарушения
+ =  -вероятность неверного контроля
-вероятность неверного контроля
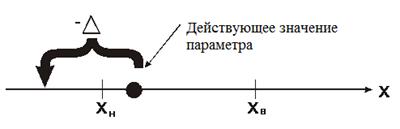 Основной причиной неверного результата контроля является наличие помех в результатах измерений.
Основной причиной неверного результата контроля является наличие помех в результатах измерений.
х – измеренная величина; Δ – помеха/погрешность измерений.
Язык FBD. Структура программы, основные элементы и правила программирования. Библиотека функциональных блоков (ФБ) системы Quantum
FBD (Function Block Diagram) – язык функциональных блоковых диаграмм, с помощью которого программа представляется из различных функциональных блоков. Язык удобен для программирования задач, например вычислительного характера, решение которых может быть представлено функциональной схемой, состоящий из таких блоков как сложение, умножение, интегрирование и т.д.
Язык FBD позволяет пользователю строить сложные процедуры обработки данных и управления объектами. В языке используются существующие библиотеки функций (логических, арифметических, ввода/вывода) и связывание их в функциональную схему или диаграмму решает поставленную задачу.
Позволяет использовать сложные алгоритмы простым вызовом функций и функциональных блоков. Имеет большую библиотеку блоков для управления непрерывным динамическим процессам.
При программировании задач логического управления FBD заимствует символику булевой алгебры и, как булевы символы имеют входы и выходы, которые могут быть соединены между собой, FBD более эффективен для представления структурной информации, чем язык релейно-контактных схем.
Диаграмма FBD описывает программу определяющую взаимосвязь между входными и выходными переменными. Программа представляет собой набор стандартных элементарных функциональных блоков, имеющихся в библиотеке Quantum.
Элементарный блок представляется одиночным прямоугольником. Элементарный блок реализует одну функцию между входами и выходами. Имя функции, реализуемой блоком, пишется на символе прямоугольника. Входы соединяются с левым краем. Выходы соединяются с правым краем.
Входом блока может быть:
· входная переменная;
· выходная переменная.
· внутренняя переменная;
· константа;
Выходом блока может быть:
· внутренняя переменная; выходная переменная.
Входные и выходные переменные присоединяются к блоку линиями соединения. Левые и правые части линии соединения должны иметь тот же самый тип переменной. Выход блока может быть присоединена к входу любого другого блока.
Способы подключения блоков FBD
Прямое подключение
Инверсное подключение
Множественные подключения
Множественные подключения используются для широковещательной передачи информации от левого края до каждого правого края.
Порядок расчета диаграмм FBD
Порядок обработки функций и функциональных блоков в программе определяется потоком данных в соответствии со следующим правилом – вычисление функции или блока возможно, если известны значения всех его входов. Поменять порядок расчета можно с помощью меток и условных переходов:
>>LAB – переход на метку "LAB"; LAB: – определение метки "LAB".
Если линия связи слева от символа перехода находится в состоянии true, то исполнение программы переходит на соответствующую метку.
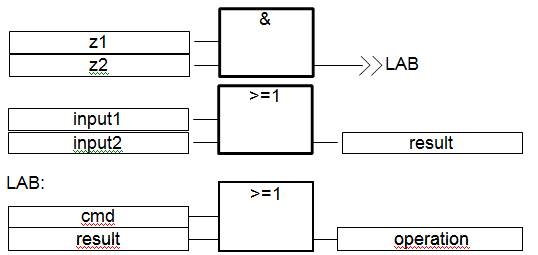
В случае если z1 AND z2будет равно true, то вычисление второй операции будет пропущено, и сразу продолжено вычисление третьей.
Специальная метка RETURN прекращает выполнение FBD программы. Если RETURN встречается в основной программе, прерывается её выполнение и начинается выполнение следующей ниже программы. В функциях и функциональных блоках происходит возврат в место вызова.
Объекты языка FBD в системе CONCEPT:
• EFB (Elementary Function Block) - элементарные функции и элементарные функциональные блоки
• DFB (Derived Function Block) - функции и функциональные блоки пользователя
• UDEFB (User Defined Elementary Function Block) – разработанные пользователем на языке Си
Библиотека элементарных функциональных блоков (EFB):
• IEC - Содержит элементарные функциональные блоки, определенные в стандарте IEC 11313. Например, она имеет блоки для математических и логических операций, блоки счетчиков, триггеров, таймеров и т.д.
• EXTENDED - Расширяет библиотеку IEC и имеет похожую структуру. Содержит полезные добавления к отдельным библиотекам.
• SYSTEM - Содержит EFB для использования системных функций контроллера. Она имеет EFB для определения времени сканирования, эксплуатации различных системных часов, управления порядком выполнения SFC-программами и для мониторинга статуса системы.
• ANA_I/O - Используется для взаимодействия с модулями аналогового ввода/вывода и предварительной обработки сигналов, полученных с этих блоков.CONT_CTLСодержит алгоритмы непрерывного управления (блоки интегрирования, дифференцирования, регуляторы и др.).
• FUZZY - Содержит функциональные блоки нечеткой логики.
• DIAGNO - Используется для самодиагностики управляющей программы. Содержит EFB для обнаружения ошибок действия, для обнаружения ошибок реакции, обнаружения ошибок взаимной блокировки, для диагностики требований процесса, динамического обнаружения ошибок и для мониторинга групп сигналов.
• COMM - Используется для обмена данными между ПЛК и другими узлами с использованием сетей Modbus, Modbus Plus или Ethernet.