

Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...

Особенности сооружения опор в сложных условиях: Сооружение ВЛ в районах с суровыми климатическими и тяжелыми геологическими условиями...
Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
Особенности сооружения опор в сложных условиях: Сооружение ВЛ в районах с суровыми климатическими и тяжелыми геологическими условиями...
Топ:
Когда производится ограждение поезда, остановившегося на перегоне: Во всех случаях немедленно должно быть ограждено место препятствия для движения поездов на смежном пути двухпутного...
Техника безопасности при работе на пароконвектомате: К обслуживанию пароконвектомата допускаются лица, прошедшие технический минимум по эксплуатации оборудования...
Характеристика АТП и сварочно-жестяницкого участка: Транспорт в настоящее время является одной из важнейших отраслей народного...
Интересное:
Средства для ингаляционного наркоза: Наркоз наступает в результате вдыхания (ингаляции) средств, которое осуществляют или с помощью маски...
Как мы говорим и как мы слушаем: общение можно сравнить с огромным зонтиком, под которым скрыто все...
Берегоукрепление оползневых склонов: На прибрежных склонах основной причиной развития оползневых процессов является подмыв водами рек естественных склонов...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
Электроприводом (ЭП) называется совокупность устройств, служащих для преобразования электрической энергии в механическую и наоборот, управления процессом преобразования, контроля и защиты оборудования.
Кроме электродвигателя в состав ЭП могут входить коммутационные устройства, электропреобразователи передаточного механизма, система управления.
На основе внешнего сигнала управления управление работой КУ и ЭлПР
Проектирование и анализ режимов работы привода всегда основывается на анализе технического механизма.
Классификация ЭП:
1) по роду тока:
- ЭП переменного тока;
- ЭП постоянного тока;
2) по роду передаточного устройства:
- редукторный;
- безредукторный;
3) по типу распределения механической энергии:
- индивидуальный;
- взаимосвязанный (2 или более приводят в действие 1 механизм);
4) по уровню автоматизации:
- неавтоматизированный (управляется оператором);
- автоматизирований (задание осуществляет оператор, ЭП поддерживает необходимые величины на заданном уровне);
5) по степени управления:
- нерегулируемый ЭП (работает с одной скоростью);
- регулируемый (за счет включения в состав ЭП преобразующего устройства возможно плавное регулирование скорости в определенном диапазоне)
Тенденция развития ЭП
Тема 2. Механика ЭП
|
|
Основные величины, используемые при анализе ЭП
n - [об мин] – частота вращения;
w [рад/с] или [с-1] - угловая частота вращения;
М [Н*м] - момент;
 [кг м2] – момент инерции (GD2).
[кг м2] – момент инерции (GD2).
Механика ЭП
 1= m a Q = 0 F1= -F2
1= m a Q = 0 F1= -F2



S→φ [рад] V→w Q→ε
 М1=-М2
М1=-М2
Механическая часть ЭП описывается уравнением движения:
Поскольку обычно рассматривается работа индивидуального ЭП, I= const, то уравнение движения имеет вид:
 – момент, развивающий двигатель;
– момент, развивающий двигатель;
 – системный момент нагрузки
– системный момент нагрузки
Для двигательного режима знак «-»

Если двигатель работает с установленной скоростью, w=const,  Мд=Мс (статический режим работы).
Мд=Мс (статический режим работы).
Если Мд>Мс  >0 – ЭП разгоняется.
>0 – ЭП разгоняется.
Если Мд<Мс  <0 – ЭП затормаживается.
<0 – ЭП затормаживается.
Переходные процессы в механической системе ЭП
Из уравнения движения при упрощении анализа переходного процесса можно рассчитать время, за которое скорость изменяется из одного в другое состояние.
 Мд - Мс
Мд - Мс  →
→  Δt=
Δt= 
Δt1=  Δt3=
Δt3= 
Рис.ХХ Тахограмма
Механические характеристики рабочих машин
Механической характеристикой рабочей машины называется зависимость момента сопротивления от угловой частоты вращения Mc=f(w)
Выражение в общем виде для описания большинства моментов сопротивления, создаваемых рабочими машинами, описывается уравнением:

Где: My – номинальный момент
Мо – момент ХХ
α – показатель степени, определяющий характер момента сопротивления;
1. α=0
Мс=Мн
1.1.Активная характеристика момента сопротивления создаётся весом груза в подъемном устройстве, при этом знак момента не зависит от знака скорости.
1.2.Реактивная характеристика момента сопротивления создается силой трения; знак момента зависит от знака скорости.
При активном характере момента вес груза направлен вниз и момент сопротивления всегда направлен в одну сторону. При подъеме груза Мс противодействует, а при спуске способствует.
|
|
При реактивном Мс всегда противодействует Мд
2. α =1 Генераторы систем Г-Д
3. α= -1 Характеристика с постоянной мощностью
Электрифицированный транспорт,
4. α> 1 Турбомеханизмы
Вентиляторы α= 2;
Насосы α=2,5-3;
Компрессоры α=4
5. Циклический характер момента сопротивления
Приведение моментов сопротивления к валу двигателя
w∂>wрм
Операция приведения осуществляется на базе баланса мощностей
 - двигательный режим
- двигательный режим
 - генераторный режим
- генераторный режим


Д.З. №1. Привести момент сопротивления к валу двигателя для кинематической схемы с параметрами:
m= 10 кг Rб=0,15 м V= 0,5 м/с i =φ ηn=0.38
Рис. --
 Мд=Мсэ -?
Мд=Мсэ -?
Wд -?
Приведение момента инерции и масс к валу двигателя
Приведение момента инерции и масс осуществляется на базе баланса кинетической энергии в системе.
Пример: для рис. --

Уравнение приведения моментов инерции в общем виде:


1. Pд = Мд wд
2. wд
Эквивалентный момент инерции, который воспринимает двигатель как момент инерции всей системы, получается из приведенной системы:
Д.З.2.
Дано:
m=10 кг 
Rб=0,15 м 

V = 0,5 м/с 
i = 4
ŋn = 0.98 
Механические характеристики двигателей.
Статическая устойчивость совместной работы ЭП и рабочего механизма
Под статической характеристикой понимают зависимость скорости от момента двигателя w=f(M∂) M∂=Mc
Для большинства электродвигателей (кроме синхронного) скорость вращения уменьшается при увеличении нагрузки на валу
w0- скорость идеального ХХ
1) статическая ошибка по скорости
2) статизм 
3) жесткость механических характеристик

Характеристики двигателя делятся на:
1) абсолютно жесткие характеристики ׀ β ׀ =∞ (синхронный двигатель);
2) жесткие характеристики ׀ β ׀ ≥10 (асинхронные двигатели и двигатели постоянного тока независимого возбуждения);
3) мягкие характеристики ׀ β ׀ <10 (двигатели постоянного тока последовательного возбуждения).
4) Абсолютно мягкие мех. Характеристики
Установленный режим работы двигателя с рабочей машиной возможен только в точке пересечения их механических характеристик.
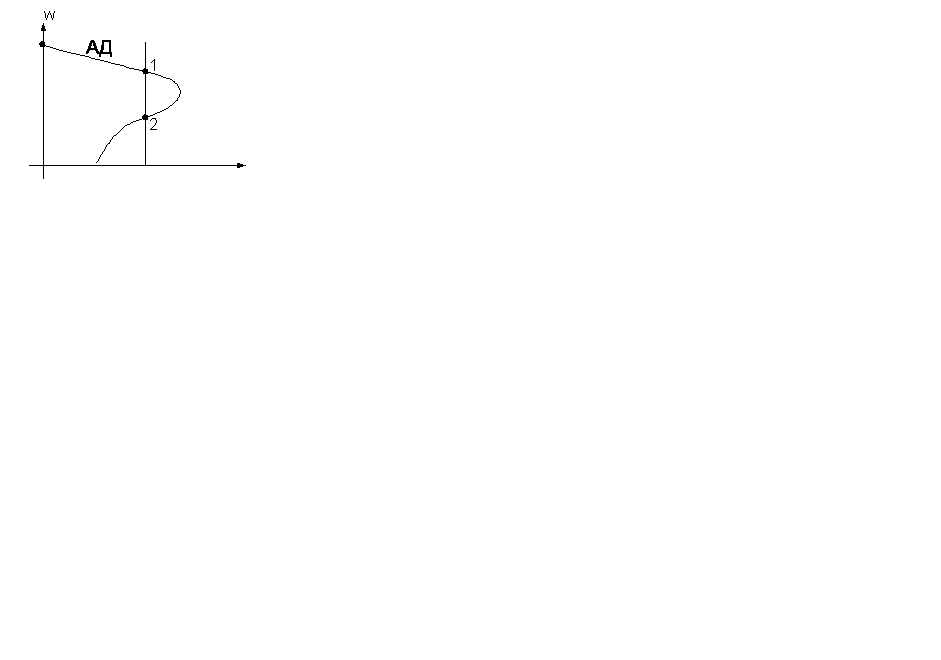
Критерии устойчивой совместной работы: если βд- βрм<0, то режим совместной работы устойчив.
Для этих характеристик т.1 является устойчивой точкой совместной работы, а т.2 – неустойчивой.
Д.З. №3. Определить устойчивость совместной работы.
|
|
Режимы работы ЭП
Любой ЭП работает либо в двигательном, либо в генераторном режиме. В общем случае механическую характеристику можно разделить на 4 квадрата:
1 и 3 – двигательный режим;
2 и 4 – генераторный режим.
Двигательный режим:
Рс – мощность, потребляемая из сети;
Рв – мощность, отдаваемая на вал;
ΔР – потери в двигателе.
1.1 Пусковой режим или режим КЗ
w=0 M=Mn=Mкз
1.2 Режим холостого хода.
w=w xx M=M xx M xx ≈(0,01÷0,05)Mн Мс=0
1.3 Режим идеального ХХ
w=w0 Mc=-M xx
2. Генераторное торможение с отдачей энергии в сеть (рекуперативное торможение).
w>w0
M∂<0
ДР→Мд-Мс=0
РТ→-Мд+Мс
3. Торможение-противовключением.
w>w0 w<0
M>Mn
4. Динамическое торможение.
Совместная работа устойчива.

 Характеристика двигателей постоянного тока независимого возбуждения
Характеристика двигателей постоянного тока независимого возбуждения
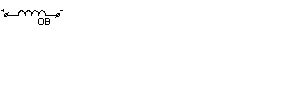
 Схема замещения якорной цепи ДПТ
Схема замещения якорной цепи ДПТ
ДП – дополнительный полюс
Е- противо ЭДС вращения двигателя
Магнитный поток Ф [Вб]
n – [об/мин]
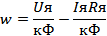
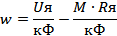
Уравнение для анализа характеристик ДПТ НВ в статических режимах используем второе уравнение Кирхгофа для схемы замещения:

для статического режима Iя = const
Uя= 
|
w=f(Iя)
|

уравнение механических характеристик ДПТ НВ




r wsp:rsidR="00000000" wsp:rsidRPr="002135B4"><w:pgSz w:w="12240" w:h="15840"/><w:pgMar w:top="850" w:right="850" w:bottom="850" w:left="1417" w:header="708" w:footer="708" w:gutter="0"/><w:cols w:space="720"/></w:sectPr></wx:sect></w:body></w:wordDocument>"> 
Допустимые токи для ДПТ общепромышленного назначения:

Допустимые значения токов якоря определяются условиями коммутации в коллекторно-щеточном узле. По этой причине пуск ДПТ НВ при подаче номинального напряжения на якорь является недопустимым режимом.
Естественной называется такая характеристика, которая получается при отсутствии добавочного сопротивления в цепи якоря и работе с номинальным напряжением и магнитным потоком. При изменении этих условий характеристика становится искусственной.
Паспортные или номинальные данные
Uян=[В], Рн[Вт], η[%], Іян[А], Рн=Uян∙Iян∙η, n[об/мин], Uнов[В]
S(S1÷S8)
|
|
Расчет недостающих параметров
1) 

2)  ДПН НВ α=0,25-0,5
ДПН НВ α=0,25-0,5
3) 

4) 
5) 
6) 
Поскольку характеристики ДПТ НВ представляют собой прямую, то достаточно 2 точки для её построения.
1) w=w0 М=0
2) w=wн М=МН
Д.З. Для электродвигателя с параметрами Р=1,1 кВт, Uяк =220 В; ŋн=0,8, nн=2000 об/мин рассчитать недостающие параметры α =0,5
- построить естественные электромеханические и механические характеристики;
- на естественной характеристике найти скорость 
- построить искусственную характеристику при введении в цепь якоря добавочного сопротивления 
- на искусственной характеристике найти 
1) 




2) 







3) 
4) 




5) 
|
|
|

Археология об основании Рима: Новые раскопки проясняют и такой острый дискуссионный вопрос, как дата самого возникновения Рима...

История развития хранилищ для нефти: Первые склады нефти появились в XVII веке. Они представляли собой землянные ямы-амбара глубиной 4…5 м...

Типы сооружений для обработки осадков: Септиками называются сооружения, в которых одновременно происходят осветление сточной жидкости...

Автоматическое растормаживание колес: Тормозные устройства колес предназначены для уменьшения длины пробега и улучшения маневрирования ВС при...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!