Преобразователи
- Выпрямители – служат для преобразования одно- и трехфазного тока в постоянный (в химической промышленности, металлургии, электроприводах постоянного тока, радиоэлектронике и автоматике).
- Инверторы – преобразуют переменный ток в одно- и трехфазный ток неизменной или регулируемой частоты. Питание устройств переменным током при первичном источнике питания типа аккумулятора.
- Преобразователи частоты – преобразуют одно- и трехфазный токи одной частоты в одно- и трехфазный токи другой частоты.
- Широтно-импульсные преобразователи – преобразуют постоянное и переменное напряжение одного уровня в постоянное или переменное напряжение другого уровня с неизменной частотой.
- Преобразователи числа фаз – преобразуют одно- или трехфазный ток заданной частоты в трех- или однофазный ток той же частоты.
Общие понятия об электроприводах
Электроприводом (ЭП) называется совокупность устройств, служащих для преобразования электрической энергии в механическую и наоборот, управления процессом преобразования, контроля и защиты оборудования.
Кроме электродвигателя в состав ЭП могут входить коммутационные устройства, электропреобразователи передаточного механизма, система управления.
На основе внешнего сигнала управления управление работой КУ и ЭлПР

Проектирование и анализ режимов работы привода всегда основывается на анализе технического механизма.
Классификация ЭП:
1) по роду тока:
- ЭП переменного тока;
- ЭП постоянного тока;
2) по роду передаточного устройства:
- редукторный;
- безредукторный;
3) по типу распределения механической энергии:
- индивидуальный;
- взаимосвязанный (2 или более приводят в действие 1 механизм);
4) по уровню автоматизации:
- неавтоматизированный (управляется оператором);
- автоматизирований (задание осуществляет оператор, ЭП поддерживает необходимые величины на заданном уровне);
5) по степени управления:
- нерегулируемый ЭП (работает с одной скоростью);
- регулируемый (за счет включения в состав ЭП преобразующего устройства возможно плавное регулирование скорости в определенном диапазоне)
Тенденция развития ЭП
- Расширение сферы применения ЭП переменного тока (надежность, экономичность, меньшая стоимость и масса).
- Расширение сферы применения регулируемых ЭП (турбомеханизмы, регулирование скорости может принести прямой экономический эффект в виде экономии электроэнергии)
- Применение современных типов электроприводов, работа которых невозможна без силового полупроводникового преобразующего устройства (вентильно-индуктивные ЭП)
- Усложнение систем управления с использованием элементов искусственного интеллекта.
Тема 2. Механика ЭП
Основные величины, используемые при анализе ЭП
n - [об мин] – частота вращения;
w [рад/с] или [с-1] - угловая частота вращения;
М [Н*м] - момент;
 [кг м2] – момент инерции (GD2).
[кг м2] – момент инерции (GD2).
Механика ЭП

 1= m a Q = 0 F1= -F2
1= m a Q = 0 F1= -F2




S→φ [рад] V→w Q→ε
 М1=-М2
М1=-М2
Механическая часть ЭП описывается уравнением движения:
Поскольку обычно рассматривается работа индивидуального ЭП, I= const, то уравнение движения имеет вид:
 – момент, развивающий двигатель;
– момент, развивающий двигатель;
 – системный момент нагрузки
– системный момент нагрузки
Для двигательного режима знак «-»

Если двигатель работает с установленной скоростью, w=const,  Мд=Мс (статический режим работы).
Мд=Мс (статический режим работы).
Если Мд>Мс  >0 – ЭП разгоняется.
>0 – ЭП разгоняется.
Если Мд<Мс  <0 – ЭП затормаживается.
<0 – ЭП затормаживается.
Переходные процессы в механической системе ЭП
Из уравнения движения при упрощении анализа переходного процесса можно рассчитать время, за которое скорость изменяется из одного в другое состояние.
 Мд - Мс
Мд - Мс  →
→  Δt=
Δt= 
Δt1=  Δt3=
Δt3= 

Рис.ХХ Тахограмма
Механические характеристики рабочих машин
Механической характеристикой рабочей машины называется зависимость момента сопротивления от угловой частоты вращения Mc=f(w)
Выражение в общем виде для описания большинства моментов сопротивления, создаваемых рабочими машинами, описывается уравнением:

Где: My – номинальный момент
Мо – момент ХХ
α – показатель степени, определяющий характер момента сопротивления;
1. α=0
Мс=Мн

 1.1.Активная характеристика момента сопротивления создаётся весом груза в подъемном устройстве, при этом знак момента не зависит от знака скорости.
1.1.Активная характеристика момента сопротивления создаётся весом груза в подъемном устройстве, при этом знак момента не зависит от знака скорости.
 1.2.Реактивная характеристика момента сопротивления создается силой трения; знак момента зависит от знака скорости.
1.2.Реактивная характеристика момента сопротивления создается силой трения; знак момента зависит от знака скорости.
 При активном характере момента вес груза направлен вниз и момент сопротивления всегда направлен в одну сторону. При подъеме груза Мс противодействует, а при спуске способствует.
При активном характере момента вес груза направлен вниз и момент сопротивления всегда направлен в одну сторону. При подъеме груза Мс противодействует, а при спуске способствует.
При реактивном Мс всегда противодействует Мд
2. α =1 Генераторы систем Г-Д

3. α= -1 Характеристика с постоянной мощностью
Электрифицированный транспорт,

4. α> 1 Турбомеханизмы
Вентиляторы α= 2;
Насосы α=2,5-3;
Компрессоры α=4

5. Циклический характер момента сопротивления

Приведение моментов сопротивления к валу двигателя

w∂>wрм
Операция приведения осуществляется на базе баланса мощностей
 - двигательный режим
- двигательный режим
 - генераторный режим
- генераторный режим


Д.З. №1. Привести момент сопротивления к валу двигателя для кинематической схемы с параметрами:
m= 10 кг Rб=0,15 м V= 0,5 м/с i =φ ηn=0.38

Рис. --
 Мд=Мсэ -?
Мд=Мсэ -?
Wд -?
Приведение момента инерции и масс к валу двигателя
Приведение момента инерции и масс осуществляется на базе баланса кинетической энергии в системе.
Пример: для рис. --

Уравнение приведения моментов инерции в общем виде:


1.  Pд = Мд wд
Pд = Мд wд
2. wд
Эквивалентный момент инерции, который воспринимает двигатель как момент инерции всей системы, получается из приведенной системы:
Д.З.2.
Дано:
m=10 кг 
Rб=0,15 м 

V = 0,5 м/с 
i = 4
ŋn = 0.98 
Механические характеристики двигателей.
Статическая устойчивость совместной работы ЭП и рабочего механизма
 Под статической характеристикой понимают зависимость скорости от момента двигателя w=f(M∂) M∂=Mc
Под статической характеристикой понимают зависимость скорости от момента двигателя w=f(M∂) M∂=Mc
Для большинства электродвигателей (кроме синхронного) скорость вращения уменьшается при увеличении нагрузки на валу
w0- скорость идеального ХХ
1) статическая ошибка по скорости
2) статизм 
3) жесткость механических характеристик

Характеристики двигателя делятся на:
1) абсолютно жесткие характеристики ׀ β ׀ =∞ (синхронный двигатель);
2) жесткие характеристики ׀ β ׀ ≥10 (асинхронные двигатели и двигатели постоянного тока независимого возбуждения);
3) мягкие характеристики ׀ β ׀ <10 (двигатели постоянного тока последовательного возбуждения).
4) Абсолютно мягкие мех. Характеристики

Установленный режим работы двигателя с рабочей машиной возможен только в точке пересечения их механических характеристик.

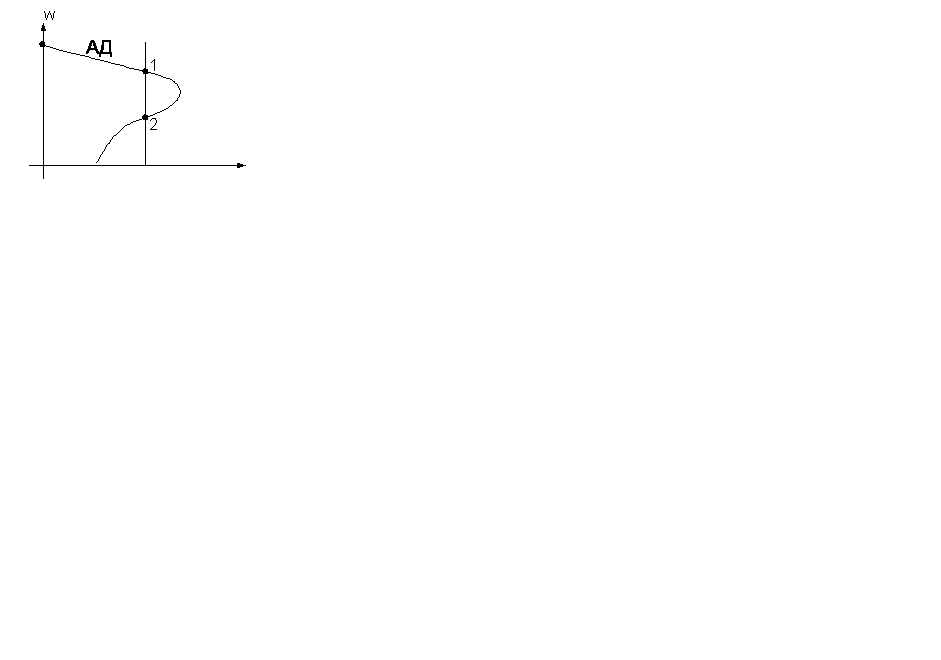
Критерии устойчивой совместной работы: если βд- βрм<0, то режим совместной работы устойчив.
Для этих характеристик т.1 является устойчивой точкой совместной работы, а т.2 – неустойчивой.
Д.З. №3. Определить устойчивость совместной работы.



Режимы работы ЭП
Любой ЭП работает либо в двигательном, либо в генераторном режиме. В общем случае механическую характеристику можно разделить на 4 квадрата:
1 и 3 – двигательный режим;
2 и 4 – генераторный режим.
Двигательный режим:
 Рс – мощность, потребляемая из сети;
Рс – мощность, потребляемая из сети;
Рв – мощность, отдаваемая на вал;
 ΔР – потери в двигателе.
ΔР – потери в двигателе.
1.1 Пусковой режим или режим КЗ
w=0 M=Mn=Mкз

1.2 Режим холостого хода.
w=w xx M=M xx M xx ≈(0,01÷0,05)Mн Мс=0

1.3 Режим идеального ХХ
w=w0 Mc=-M xx

2. Генераторное торможение с отдачей энергии в сеть (рекуперативное торможение).
w>w0
 M∂<0
M∂<0
 ДР→Мд-Мс=0
ДР→Мд-Мс=0
РТ→-Мд+Мс
3.  Торможение-противовключением.
Торможение-противовключением.
 w>w0 w<0
w>w0 w<0
M>Mn
4. Динамическое торможение.




Совместная работа устойчива.


 Характеристика двигателей постоянного тока независимого возбуждения
Характеристика двигателей постоянного тока независимого возбуждения
 Схема замещения якорной цепи ДПТ
Схема замещения якорной цепи ДПТ
ДП – дополнительный полюс
Е- противо ЭДС вращения двигателя
Магнитный поток Ф [Вб]
n – [об/мин]
Уравнение для анализа характеристик ДПТ НВ в статических режимах используем второе уравнение Кирхгофа для схемы замещения:

для статического режима Iя = const
Uя= 
уравнение электромеханических характеристик ДПТ НВ
w=f(Iя)
M=Iя∙кФ Iя= 
уравнение механических характеристик ДПТ НВ




r wsp:rsidR="00000000" wsp:rsidRPr="002135B4"><w:pgSz w:w="12240" w:h="15840"/><w:pgMar w:top="850" w:right="850" w:bottom="850" w:left="1417" w:header="708" w:footer="708" w:gutter="0"/><w:cols w:space="720"/></w:sectPr></wx:sect></w:body></w:wordDocument>"> 
 Допустимые токи для ДПТ общепромышленного назначения:
Допустимые токи для ДПТ общепромышленного назначения:

Допустимые значения токов якоря определяются условиями коммутации в коллекторно-щеточном узле. По этой причине пуск ДПТ НВ при подаче номинального напряжения на якорь является недопустимым режимом.
Естественной называется такая характеристика, которая получается при отсутствии добавочного сопротивления в цепи якоря и работе с номинальным напряжением и магнитным потоком. При изменении этих условий характеристика становится искусственной.
Паспортные или номинальные данные
Uян=[В], Рн[Вт], η[%], Іян[А], Рн=Uян∙Iян∙η, n[об/мин], Uнов[В]
S(S1÷S8)
Расчет недостающих параметров
1) 

2)  ДПН НВ α=0,25-0,5
ДПН НВ α=0,25-0,5
3) 

4) 
5) 
6) 
 Поскольку характеристики ДПТ НВ представляют собой прямую, то достаточно 2 точки для её построения.
Поскольку характеристики ДПТ НВ представляют собой прямую, то достаточно 2 точки для её построения.
1) w=w0 М=0
2) w=wн М=МН
Д.З. Для электродвигателя с параметрами Р=1,1 кВт, Uяк =220 В; ŋн=0,8, nн=2000 об/мин рассчитать недостающие параметры α =0,5
- построить естественные электромеханические и механические характеристики;
- на естественной характеристике найти скорость 
- построить искусственную характеристику при введении в цепь якоря добавочного сопротивления 
- на искусственной характеристике найти 
1) 




2) 







3) 
4) 




5) 
Тормозные режимы ДПТ
Тормозные режимы используются для быстрой остановки и изменения направления вращения двигателя, а также создания тормозного момента в подъемных и прочих механизмах.
- Рекуперативное торможение с отдачей энергии в сеть.
Характеристика является продолжением характеристики в двигательном режиме, если w>wo

Eя>U Iя<0
Этот режим возможен:
- в подъемных механизмах и электротранспорте (при активном характере момента сопротивления);
 - при переходе с одной характеристики на другую;
- при переходе с одной характеристики на другую;
Для реализации этого вида торможения необходимо, чтобы источник питания позволял протекание тока в обратном направлении.
2. Динамическое торможение осуществляется путем отключения якоря от источника питания и замыкания якорной цепи на добавочное сопротивление.

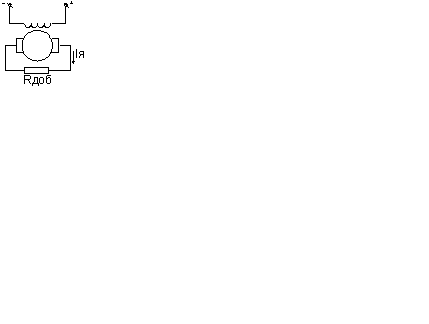

Для ДПТ ПВ режим динамического торможения может быть осуществлен 2 способами:
- при независимом подключении обмотки возбуждения;
- в режиме самовозбуждения.
 При переводе в режим динамического торможения обмотку возбуждения ДПТ ПВ необходимо реверсировать или обмотка возбуждения включается в диагональ диодного моста.
При переводе в режим динамического торможения обмотку возбуждения ДПТ ПВ необходимо реверсировать или обмотка возбуждения включается в диагональ диодного моста.
3. Торможение противовключения – ТПВ при активном характере момента сопротивления Мс→акт.
Осуществляется введением большого добавочного сопротивления.


- ТВП при реверсе скорости двигателя
Реверс осуществляется путем изменения полярности напряжения якоря или напряжения обмотки возбуждения с введением добавочных сопротивлений.

Задача по АД
Расчет и построение статистических характеристик АД
Начальные данные
 Расчет недостающих параметров
Расчет недостающих параметров
 1.
1.  u=
u=  =308,5с-1
=308,5с-1

 c-1
c-1

 no=
no= 
 Если nu=1400, то nu=1500
Если nu=1400, то nu=1500
 2. Мu=
2. Мu= 

R1=0,057 Ом 
R2=0,042 Ом
X1=0,2 Ом 3.  =
= 
X2=0,24 Ом 4. Мкрит. и Sкрит.
Sкрит. = Su( (2,5+
(2,5+  =0,083
=0,083
-380/220
r wsp:rsidR="00000000"><w:pgSz w:w="12240" w:h="15840"/><w:pgMar w:top="850" w:right="850" w:bottom="850" w:left="1417" w:header="708" w:footer="708" w:gutter="0"/><w:cols w:space="720"/></w:sectPr></wx:sect></w:body></w:wordDocument>">  или
или
Sкрит= 
Mкрит.=Мu  = 445,7 H
= 445,7 H 
Или
Мкрит.=  =
=  =435,9 Нм
=435,9 Нм
5. 

6. 
Тема 1. Введение в электропривод
ЭлП – электр. преобразователь;
ЭМ – электр. машина;
МП – мех. Передача;
РМ – рабочая машина;
КА – коммутационная аппаратура;
ЭСС – электроснабжающая сеть;
БД – блок датчиков;
СУ – система управления;
U3 – напряжение задания;

Электропривод – электромеханическая система (ЭМС) состоящая из электрических и механических элементов предназначенных для осуществления управляемого процесса обратимого преобразования электрической энергии в механическую и передачи ее исполнительному органу рабочей машины для приведения ее в движение.
Классификация электроприводов:
1. По роду приводного двигателя
- Электронные машины постоянного тока.
- Электронные машины переменного тока.
2. По способу распределения механической энергии:
- Групповой электропривод (обеспечивает движение исполнительных органов нескольких рабочих машин; передача механической энергии и ее распределение произв. с помощью трасмисии механической);
- Индивидуальный
- Взаимосвязанный (содержит 2 или больше механических связанный между собой эл. двигателя);
3. По возможности регулирования скорости ЭП
- регулируемый ЭП (обеспечение различной скорости вращения рабочей машины)
- нерегулируемый ЭП (обеспечение движения рабочей машины с одной рабочей скоростью);
4. По степени управляемости:
- программно-управляемый ЭП (управляемые в соответствии с заданной программой);
- следящий ЭП (автоматически отрабатывает движение рабочей машины с определенной точностью в соответствии с меняющимися произвольно меняющимся сигналам);
- адаптированный ЭП (автоматически меняет структуру или параметры системы при изменении условий работы с целью выбора оптимального решения)
5. По роду передаточного устройства:
- редукторный
- без редукторный
6. По уровню автоматизации:
- не автоматизированный (все режимы работы ЭП задаются оператором);
- автоматизированный (оператором задается необходимый режим работы, функциями ЭП является поддержание задонного режима роботы);
- автоматический (без оператора)
Общие требования к электроприводу
- Надежность (способность объекта выполнять свои функции в течении определенного промежутка времени).
- Точность (способность реализовать заданный технологический процесс).
- Энергетическая эффективность (КПД, потребляемая мощность).
- Ресурсоемкость (учитываем стоимость материалов в ЭП, трудоемкость при монтаже, наладке и эксплуатации).
Основные направления развития ЭП
- Расширение сферы применения ЭП вообще (бытовая техника, медицина).
- Расширение диапазона мощностей в двигателях (до 12 МВт для постоянного тока, до 60 МВт для переменного, минимальная мощность 0.1 Вт).
- Расширение диапазона скоростей вращения (макс – 150 – 350 тыс.об/мин.: химическая промышленность, обработка урана, электропромышленность, металлообработка станков; мин. – несколько об/мин.:мельницы, прокатные станы).
- Расширение сферы ЭП переменного тока (25% - постоянного тока, 75% - переменного тока).
- Интенсивное развитие техники для применения автоматически регулируемых ЭП с использованием микропроцессорных систем управления (Fuzzy – логика, нейтральные сети).
Классификация и режимы работы производственных
машин и механизмов
- По назначению:
- Подъемно-транспортные машины (лифты, конвейеры, краны подъемные, эскалаторы, канатные дороги).
- Землеройные машины (одноковшовые экскаваторы, дреглайны, роторные экскаваторы).
- Машины для транспортировки жидких средств и грузов (насосы центробежные и поршневые, гидротурбины, вентиляторы, компрессоры).
- металлорежущие станки (токарные, фрезерные, шлифовальные).
2. Область применения.
3. Конструктивное исполнение. Механизмы выполняют однотипную рабочую операцию, имеют различные конструктивные особенности (шахтерская подъемная установка имеет специфические конструктивные отличия от лифта).
4. Характер технологического процесса:
- Механизм циклического действия (подъемные краны, лифты, экскаваторы).
- Механизмы непрерывного действия (насосы, компрессоры, эскалаторы, конвейеры, вентиляторы).

ТПМ – типовые промышленные механизмы
- Механизмы непрерывного транспорта (цепные конвейеры, канатные дороги, эскалаторы) предназначены для перемещения грузов или пассажиров в строго определенном направлении на ограниченное расстояние. Конвейеры применяются во всех отраслях промышленности для непрерывного перемещения без остановок на разгрузку или загрузку насыпных грузов. Основной характеристикой является его производительность:
 ,
,
V – скорость передвижения рабочего органа;
m – масса ------------------
S – площадь поперечного сечения слоя материала. Наибольшую производительность имеют конвейеры в горнорудной отросли. Режимы их работы наиболее тяжелы – перепады температур и влажность, большая запыленность
Канатные дороги – подвесные конвейеры, где тянущими и несущими элементами являются канаты (маятниковые и кольцевые, грузовые, транспортные и отвесные)
Эскалатор – это наклонный цепной конвейер, предназначенный для перемещения людей с одного к другому уровню.
Мощность электродвигателя:
 ,
,
K3 – коэффициент запаса 1.1 – 1.3
Fcm – сила сопротивления движения
Pэд > Ppacr
При выборе электродвигателя к конвейерным установкам необходимо учитывать большие моменты при трогании механизма, обеспечение требований надежности и экономичности работы.
Подъемные краны
Классификация подъемных кранов.
- По области применения (цеховые, транспортные, строительные, морские)
- По конструкции (мостовые, козловые, башенные, краны-штабелеры)
- По виду грузозахватных приспособлений (крюки, грейферы, магниты)
Режимы работы подъемных кранов повторно кратковременные:
Л – легкий режим с ПВ (продолжительность включения)  (до 60 включений в час).
(до 60 включений в час).
С – средний режим с ПВ = 25% (до 120 вкл. В час)
Т – тяжолый режим с ПВ = 40% (до 240 вкл. В час)
ВТ – весьма тяжолый режим с ВП = 60% (до 600 вкл. В час)
Основными механизмами крана являются: механизм подъема, механизм перемещения тележки и механизм перемещения крана.
График нагрузки механического подъема состоит из 4-х участков: подъем и опускание, с грузом и без груза.
Для механизмов перемещения характерно 2 участка: робота с грузом и без него.
Электропривод крановых механизмов выполняется на базе асинхронных двигателей с короткозамкнутым ротором (КЗР) и фазным ротором (ФР) и на базе двигателей постоянного тока (ДПТ)
Ррасч=  ,
,
m – текущая масса груза; m0 – масса крана без груза;
Vп – номинальная скорость подъема груза;
 – КПД передачи;
– КПД передачи;
Pэд > Ppacr;
Требования к электроприводам
- Повышенная надежность и безопасность роботы (обеспеченная за счет системы выключения, ограничителей).
- Обеспечение необходимого диапазона регулирования частоты вращения ЭД.
Установленные тяжелые грузы – значит, сложнее, чем легкие. Посадочные скорости должны быть небольшие. Поэтому необходимо изменять и регулировать частоты вращения двигателя.
- Ограничение ускорений. Из-за большой инерционности крановых механизмов необходимо иметь большие ускорения при их разгоне и торможении. Это приводит к значительным перегрузкам, раскачиванию. Поэтому необходимо ограничение скоростей допустимыми значениями.
ЭП подъемных установок
(лифты, шахтные подъемники)
Лифты бывают пассажирские, грузовые и грузопассажирские.
Пассажирские: тихоходные, быстроходные, скоростные, высокоскоростные. В тихоходных и быстроходных используются двигатели переменного тока, в остальных – постоянного тока.
Лифт имеет 2 основных механизма: механизм подъема и механизм открывания дверей.
Требования к ЭП лифтов
- Безопасность обслуживания.
- Обеспечение точности остановки кабины на нужные отметки.
- Обеспечение минимального времени переходных процессов при ограниченных ускорениях в допустимых пределах.
ЭП экскаваторов
Экскаватор одноковшовый – это самоходная выемочно-погрузочная машина используемая при земельных роботах, строительстве.
Классификация:
- По производительности: малой (до 2м3), средней (2-10 м3) и большой производительности (от 10 м3).
- По виду ходового оборудования: гусеничные-карьерные, драглайны, и т.д.
- По характеру рабочего органа: экскаваторная лопата (крепкое соединение ковша со стрелой), экскаваторные драглайны (ковш подвешен к стреле канатах)
- По конструкции: одноковшовые, роторные.
Основными механизмами экскаватора являются: механизме подъема, напора, поворота, передвижения.
Режим работы механизма характерен частыми пусками, реверсом, быстрыми разгонами и остановками, резкими толчками и пиками нагрузки.
Требования к ЭП экскаваторов
1. Простота и максимальная надежность.
2. Ограничение момента и тока допустимое значениями во всех режимах роботы.
3. Регулировка скорости в диапазоне (4÷6)÷1.
4. Ограничение динамических нагрузок в механическом оборудовании.
 [кВт]
[кВт]
F – сила сопротивления
Содержание контрольной роботы
- Титульный лист
- Содержание
- Введение о объекте (1 стр)
- Основной текст
- Технологическая система промышленной установки
- Описание технологии процесса
- Характеристики электронного оборудования и анализ эффективности его работы
- Выводы
- Перечень ссылок
- Приложение
Тема: Электромеханическое оборудование и режимы работы технологические механизмы.
Преобразовательные устройства в системах электропривода.
Электрические преобразователи служат для изменения параметров напряжения, подаваемого на двигатель. Для ЭП постоянного тока это преобразователи, позволяющие изменять уровень среднего значения напряжения, подаваемого на якорь двигателя или обмотку возбуждения. Для ЭП переменного тока преобразователи изменяют амплитуду и частоту основной гармоники напряжения.
 - диод
- диод
 - тиристор
- тиристор
Для открытия тиристора должно быть выполнено 2 условия:
1) к нему должно быть приложено прямое напряжение;
2) подача напряжения на управляющий -----------
Тиристор – это наполовину управляемый силовой ключ (закрывается, когда напряжение между А и К изменено на обратное).
В ЭП широко используется транзисторная техника. В ЭП транзисторы работают только в ключевом режиме.
Преобразователи
- Выпрямители – служат для преобразования одно- и трехфазного тока в постоянный (в химической промышленности, металлургии, электроприводах постоянного тока, радиоэлектронике и автоматике).
- Инверторы – преобразуют переменный ток в одно- и трехфазный ток неизменной или регулируемой частоты. Питание устройств переменным током при первичном источнике питания типа аккумулятора.
- Преобразователи частоты – преобразуют одно- и трехфазный токи одной частоты в одно- и трехфазный токи другой частоты.
- Широтно-импульсные преобразователи – преобразуют постоянное и переменное напряжение одного уровня в постоянное или переменное напряжение другого уровня с неизменной частотой.
- Преобразователи числа фаз – преобразуют одно- или трехфазный ток заданной частоты в трех- или однофазный ток той же частоты.