Благодаря надежности двигатели получили широкое распространение.. характеристики двигателя анализируются на Г- или Т-образной схемах замещения. Т-образная схема дает более точные, но сложные расчеты.
 Г-образная схема замещения АД
Г-образная схема замещения АД
R1, x1 - активное и индуктивное сопротивление обмотки статора;µ
х1 – индуктивное сопротивление рассеивания;
R’2, x’2 – приведенные активное и индуктивное сопротивления ротора;
хμ – индуктивное сопротивление намагничивания;
S – скольжение 


Номинальное скольжение двигателя находим Sн =0,01÷0,1 среднее значение 0,05
Ток намагничивания 


В выражение для тока статора входят активная и реактивная составляющие тока ротора.


В пусковом режиме Iп≈(5÷7)Iн
λ; 
Механические характеристики АД
Потребляемую мощность можно представить как сумму потерь в обмотках статора и электромагнитной мощности.




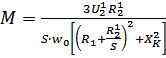



Если в выражении для М подставить S=1, мы получим значение пускового момента. Механическую характеристику АД можно рассчитать по формуле Класса.
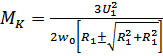

Оба выражения дают существенную погрешность в точке Мп, поэтому используем уточненную формулу Класса

Sk – критическое скольжение, соответствующее 






Расчет параметров схемы замещаем по паспортным данным.
Паспортные данные АД:
Un [В] 380/220
Pn [кВт]
nn [об/мин]
cos φn [%]
Способы регулирования скорости АД
- Изменение сопротивления ротора
- изменение активного сопротивления



С введением в роторную цепь добавочного активного сопротивления уменьшается жесткость механических характеристик. Момент критичности не изменяется. Скольжение критическое, пропорциональное суммарному сопротивлению роторной цепи. Такой способ используется:
1) для формирования пусковых режимов (Мп возрастает, Iп уменьшается);
2) Регулирование скорости обычно в непродолжительном режиме, если не предъявляются высокие требования к точности регулирования.
 Недостатки: скорость вращения зависит от момента нагрузки (невозможность регулировать скорость на ХХ); неэкономичность (в обмотках двигателя и на добавочных сопротивлениях теряется мощность скольжения.
Недостатки: скорость вращения зависит от момента нагрузки (невозможность регулировать скорость на ХХ); неэкономичность (в обмотках двигателя и на добавочных сопротивлениях теряется мощность скольжения. 
Такой способ используется в подъемных и крановых механизмах.
- включение в роторную цепь активного индукционного сопротивления.
Индукционные элементы (реакторы) включаются последовательно или параллельно пусковым добавочным сопротивлением.

 Использование для формирования пусковых режимов без переключения добавочного сопротивления. Эффект автоматически изменения сопротивления роторной цепи заключается в изменении индуктивного сопротивления реактора пропорционально скольжению.
Использование для формирования пусковых режимов без переключения добавочного сопротивления. Эффект автоматически изменения сопротивления роторной цепи заключается в изменении индуктивного сопротивления реактора пропорционально скольжению.

2. Изменение числа пар полюсов wo =  ; р – число пар полюсов
; р – число пар полюсов
Многоскоростные АД (2-хскоростные) нашли применение в турбомеханике (насосы, вентиляторы). Скорость вращения регулируется ступенчато путем изменения пар полюсов через переключение схемы соединения обмоток.


- переключение 







При переключении схемы в Можно увеличить примерно в 2 раза. Перегрузочная способность не изменяется, а скорость увеличивается в 2 раза - Δ→


Р примерно одинакова, а перегрузочная способность уменьшена в 2 раза.
- Изменение напряжения питания обмоток статора U1=var.

 U1>U2
U1>U2
 При уменьшении напряжения питания Sk не изменяется, Мк изменяется пропорционально квадрату U.
При уменьшении напряжения питания Sk не изменяется, Мк изменяется пропорционально квадрату U.
Для реализации такого способа используются трансформаторы, автотрансформаторы, тиристорные регуляторы напряжения. Способ широко используется для управления пуско-тормозными режимами АД.
Для регулирования скорости такой способ применяется для снижения скорости на 10-15% (для турбомеханизмов).
Увеличения диапазона регулирования добиваются введением отрицательной обратной связи по скорости вращения (для ТРН).
Иногда уменьшение напряжения при недогрузке двигателя используется в системах минимизации потерь двигателя.
- Изменение частоты питающего напряжения wo= ; этот способ есть наиболее перспективным и экономичным, однако, требует установки дорогостоящих ПЧ. Обычно ПЧ строятся на базе автономного инвертора напряжений.
Для обеспечения постоянства перегрузочной способности и правильной работы системы одновременно с частотой нужно изменять напряжение питания.
Закон частотного управления (отношение напряжения к частоте) определяется характером нагрузки на валу двигателя.


- Введение добавочной ЭДС в цепь ротора. Способ используется в машинно-вентиляционных системах. В качестве источника добавочной ЭДС используется машина постоянного тока (машинно-вентиляционный каскад) или инвертор напряжения, ведомый сетью (асинхронный вентиляционный каскад).

При отсутствии добавочной ЭДС двигатель работает на естественных характеристиках. При введении добавочной ЭДС снижается ток ротора, что приводит к уменьшению развивающего двигательного момента. Скорость двигателя снижается. При снижении скорости ЭДС ротора увеличивается, что приводит к росту тока ротора и обеспечению равенства момента сопротивления и момента двигателя, но уже на меньшей скорости.
 →S=1
→S=1
Такой способ используется для регулирования скорости АД с фазным ротором в диапазоне 2:1. При этом энергия скольжения ΔРs отдается либо в питающую цепь, либо на вал АД.
Тормозные режимы АД
- Генераторное торможение с отдачей энергии в сеть.

 Тормозной момент двигателя и скорость вращения можно регулировать введением добавочного сопротивления. Рекуперативный режим может наблюдаться в системе ПЧ АД при переходе из характеристик с большой частотой питания на характеристики с меньшей.
Тормозной момент двигателя и скорость вращения можно регулировать введением добавочного сопротивления. Рекуперативный режим может наблюдаться в системе ПЧ АД при переходе из характеристик с большой частотой питания на характеристики с меньшей.
2. Торможение противовключением.
 ТПВ при активном моменте сопротивления путем введения добавочного сопротивления в цепь ротора.
ТПВ при активном моменте сопротивления путем введения добавочного сопротивления в цепь ротора.
S= 
 ТПВ при реверсе скорости АД.
ТПВ при реверсе скорости АД.
Изменение направление вращения поля статора осуществляется изменением порядка фаз.
3. Динамическое торможение
 Режим динамического торможения АД осуществляется путем отключения обмоток статора от трехфазной сети и подачи пониженного постоянного напряжения на две фазы двигателя.
Режим динамического торможения АД осуществляется путем отключения обмоток статора от трехфазной сети и подачи пониженного постоянного напряжения на две фазы двигателя.
Un=(0.1-0.2)Uн
Тормозной момент зависит от:
1) уровня постоянного напряжения
2)  схемы соединения обмоток статора
схемы соединения обмоток статора
Расчет производим на основе эквивалентного передаточного намагничивания силы от постоянного тока силе от переменного тока (Величко, Родькин «ТЭП»).
 Uп2=Uп1
Uп2=Uп1
Механические характеристики АД в несимметричных режимах





