Дайте определение электропривода.
Электрический привод (сокращённо — электропривод) — это электромеханическая система для приведения в движение исполнительных механизмов рабочих машин и управления этим движением в целях осуществления технологического процесса.
Дайте определение электропривода в виде структурной схемы.
3) 
1-электрическая сеть, 2-преобразовательное устройство(тр-р, преобраз.), 3-ЭД. 4-передаточное устройство(редуктор), 5-рабочий орган, 6-устройство управления.
Дайте определение группового электропривода.
1) Групповым электроприводом называется такой привод, в котором от одного электродвигателя с помощью одной или нескольких трансмиссий движение передается группе рабочих машин.
Дайте определение индивидуального электропривода.
ИНДИВИДУАЛЬНЫЙ ЭЛЕКТРОПРИВОД -электропривод, к-рый обеспечивает движение только-одного механизма (напр., вращение шпинделя станка) в отличие от группового электропривода, в к-ром один электродвигатель приводит в движение одновременно неск. механизмов.
Дайте определение взаимосвязанного электропривода.
- Когда несколько эл. и мех. связанных эл.машин работают на один рабочий орган технологической машины
Перечислите особенности применения электропривода в промышленном производстве.
1)большая влажность (вечером достигает до 100%);
2)механизмы работают кратковременно, изоляция не успевает высушиться;
3)источник электроэнергии(трансформаторы)имеют ограниченную мощность с мощностями электрических машин не соизмеримы
Области применения приводов с однофазным питанием - насосы для перекачки воды, центрифуги, системы ирригации.
На основании какого закона осуществляется приведение моментов сопротивления в электрическом приводе?
Приведенный момент сопротивления находится на основе закона сохранения энергии или энергетического баланса.

9 На основании какого закона осуществляется приведение сил сопротивления в электрическом приводе?
Приведение сил сопротивления производится аналогично приведению моментов. Если скорость поступательного движения V, м/c, а угловая скорость вала двигателя w д, рад/с, то
 , (2.4)
, (2.4)
где Fсм – сила сопротивления производственного механизма, Н.
На основе какого предположения осуществляется приведение моментов инерции в электрическом приводе?

Мсо – privedennii moment pri puske;
Мсн – privedennii moment soprotivleniya pri nominal’noi nagruzke;
α – pokazatel’ stepeni;
 – nominal’naya skorost’.
– nominal’naya skorost’.
Перечислите категории механических характеристик механизмов промышленного назначения с электроприводом.
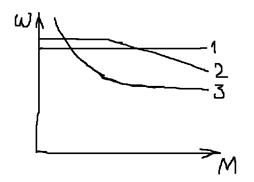 В зависимости от величины жесткости, мех-ие хар-ки ЭД делят на:
В зависимости от величины жесткости, мех-ие хар-ки ЭД делят на:
1. Абсолютно жесткие β=знак бесконечности (синхронные ЭД)
2. Жесткая 40> β>10 (эл.дв. пост.тока, АД)
3. Мягкая β≤10 (МПТ послед.возбуждения)
Рис. 2а. Типовой вид механической характеристики АД
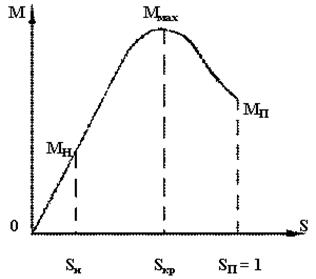
Рис. 2б. Механическая характеристика в координатах М(s) [20]
- рабочий участок (от Ω0 до точки а), где возможна работа АД в установившемся режиме по разомкнутой схеме.
Потери энергии при пуске АД




103 Потери при пуске состоят:



105 Режимы работы электроприводов:
1. Продолжительно номинальный режим
2. Кратковременный номинальный режим
3. Повторно-кратковременный номинальный режим
4. Повторно-кратковременный номинальный режим работы с частыми пусками
5. Повторно-кратковременный номинальный режим работы с частыми пусками и электрическим торможением
6. Перемежающимся номинальным режимом
7. Перемежающимся номинальным режимом работы с частыми пусками
8. Перемежающимся номинальным режимом работы с двумя или более угловыми скоростями

108 Повторно-кратковременным номинальным режимом работы S3 называется режим, при котором кратковременные периоды неизменной номинальной нагрузки (рабочие периоды) чередуются с периодами отключения машины (паузами), причем как рабочие периоды, так и паузы не настолько длительны, чтобы превышения температуры могли достигнуть установившихся значений


110 Подход к выбору ЭМ по мощности для режима S1 при переменной нагрузке. Метод средних потерь.

 (2)
(2)
 (3)
(3)

Метод средних потерь
Это значит, что все выделившееся за цикл тепло отводится в окружающую среду., т.е.
 (11)
(11)
Уравнение (11), выражающее закон сохранения энергии в интегральной форме, можно записать в следующем виде:

или, очевидно,
 , (12)
, (12)
т.е. средняя за цикл мощность потерь пропорциональна средней температуре перегрева.
Для номинального режима, в соответствии с (6) имеем:
 , (13)
, (13)
где D Рн – номинальная мощность потерь;

Рн – номинальная мощность двигателя;
h н – номинальный КПД двигателя;
t н = t доп - номинальная (допустимая) температура перегрева двигателя.
Сравнивая (12) и (13), легко прийти к формулировке метода средних потерь: если средняя за цикл мощность потерь не превосходит номинальную мощность потерь, т.е.
 ,
,
то средняя температура перегрева не превышает допустимую
 .
.
Пусть нагрузочная диаграмма, построенная для предварительно выбранного двигателя, имеет вид, представленный на рис. 9. Для каждого уровня нагрузки двигателя (на каждом участке диаграммы) вычислим мощность Pi = Miw i по кривой h (Р/Рн) определим значение КПД h i, и найдем потери

Рис. 9. Нагрузочная диаграмма и кривая t (t) для “далекого” цикла
Затем вычислим средние потери:
(в примере n = 3) и сравним их с D Рн. Если D Рср £ D Рн, двигатель выбран правильно.
Если при сопоставлении средних потерь за цикл с номинальными потерями окажется, что D Рср > D Рн, то двигатель будет перегреваться, что недопустимо. Наоборот, при D Рср < < D Рн двигатель будет плохо использован по нагреву. В обоих случаях необходимо выбрать другой двигатель, перестроить нагрузочную диаграмму и вновь проверить двигатель по нагреву путем сопоставления средних потерь при переменном графике нагрузки с номинальными потерями при постоянной нагрузке.
Метод средних потерь позволяет оценивать среднюю температуру перегрева, не прибегая к построению t (t). Действительная температура отличается от средней, однако, если выполняется условие
Tц << T т. н , (14)
то эта разница будет весьма малой. Условие (14) является необходимым при использовании метода средних потерь.
111 Применение метода эквивалентного тока для выбора по мощности ЭМ привода работающего в режиме S1. Ограничения.
Назовем эквивалентным током такой неизменяющийся ток, при работе с которым в электрическом двигателе выделяются потери, равные средним потерям при переменном графике нагрузки, т.е.
 (15)
(15)
Средняя мощность потерь за цикл при переменном графике нагрузки двигателя и продолжительном режиме работы

Выразив потери на каждом из участков графика D Рi через постоянную и переменную составляющие и заменив средние потери их значением через эквивалентный ток, получим:

Открыв скобки и сгруппировав постоянные и переменные потери, получим:

откуда эквивалентный ток при переменном графике нагрузки
 (16)
(16)
или в общем случае
 (17)
(17)
Вычисленный таким образом эквивалентный ток сопоставляется с номинальным током предварительно выбранного двигателя и если окажется, что Iэкв £ Iн, то двигатель удовлетворяет требованиям нагрева.
Метод эквивалентного тока, как и метод средних потерь, основан на допущении близости среднего за цикл и максимального перегревов. Это допущение не влечет за собой существенной погрешности, если выполнено условие (14). Кроме того, метод эквивалентного тока исходит из предположения независимости потерь в стали и механических от нагрузки и предполагает постоянство величины сопротивления главной цепи двигателя на всех участках заданного графика нагрузки. Следовательно, в случаях, когда k ¹ const (например, когда асинхронный двигатель работает при изменяющемся напряжении) или R ¹ const (асинхронный дв
112 Применение метода эквивалентного момента для выбора по мощности ЭМ привода работающего в режиме S1. Ограничения.
Метод эквивалентного момента
М= СМ*I
Cправедлив для условия Ф=const и R= const. Метод не может быть применен для машин у которых Ф=var
MЭ= 
113 Применение метода эквивалентной мощности для выбора по мощности ЭМ привода работающего в режиме S1. Ограничения.
Метод эквивалентной мощности
P= M*ω; ω=const, Ф=const, R= const
Метод не может быть применен при ω не const

Pд≥РЭ
114 Выбор ЭМ привода по мощности из серии машин для режима S2 при переменной нагрузке в цикле работы.

Как выбирается контактор?
Контактор (силовое реле, модульный контактор) – это удаленно управляемый аппарат для коммутации, который позволяют коммутировать особо мощные нагрузки как постоянного, так и переменного тока. Главной особенностью контакторов является то, что они выполняют разрыв сети сразу в нескольких точках, в отличие от обычных электромагнитных реле, которые разрывают электрическую цепь лишь в одной точке. Выбор контактора следует начинать с определения необходимо типа. Электромагнитные контакторы подразделяются на контакторы переменного тока, контакторы постоянного тока и постоянно-переменные контакторы. Контакторы переменного тока (к примеру, КМИ-10960 от IEK) используются при управлении асинхронными двигателями для выведения резисторов пуска, включения трансформаторов, тормозных электромагнитов, нагревательных устройств и другого электрооборудования. Контакторы постоянного тока (например, ABB AL 9) используются для включения/отключения приемников электроэнергии в цепях с постоянным током; в устройствах повторного включения и приводах выключателей высокого напряжения.
Назначение реле времени?
Реле́ вре́мени — реле, предназначенное для создания независимой выдержки времени и обеспечения определённой последовательности работы элементов схемы. Реле времени применяется в случаях, когда необходимо автоматически выполнить какое-то действие не сразу после появления управляющего сигнала, а через установленный промежуток времени.
Дайте определение электропривода.
Электрический привод (сокращённо — электропривод) — это электромеханическая система для приведения в движение исполнительных механизмов рабочих машин и управления этим движением в целях осуществления технологического процесса.






