Ниже приведена примерно пятая часть семестровой работы студента гр. АТП-07 филиала МЭИ в г. Волжском Быкова Артёма Юрьевича. Здесь отсутствуют программы по следующим темам: «Информационный обмен в промышленных контроллерах [95]», «Реализация алгоритмов сигнализации [23, 25]», «Реализация дискретных систем управления [25, 26, 27]».
Трёхканальный блок циклической индикации
Программная реализация такого блока на языке ST представлена ниже. В этом блоке имеется счётчик каналов (он же индицирует отображаемый в данный момент канал). Отображаемая величина берётся из канала, соответствующего текущему значению счётчика. Изменение значения счётчика происходит в момент времени, соответствующий смене каналов. Этот момент времени определяется с помощью таймера и триггера.
FUNCTION_BLOCK cycle_ind (*блок циклической индикации*)
VAR_INPUT
sig_1: REAL;
sig_2: REAL;
sig_3: REAL;
time_sm: TIME; (*время смены каналов*)
END_VAR
VAR_OUTPUT
out: REAL; (*величина сигнала отображаемого канала*)
num_chan: BYTE; (*номер отображаемого канала*)
END_VAR
VAR
tm: TON; (*таймер*)
t: TIME; (*прошедшее время от последней смены каналов*)
trig: F_TRIG; (*тригер заднего фрона для определения момента
смены каналов*)
END_VAR
(*отсчитываем время*)
tm(IN:=t<time_sm, PT:=time_sm+T#1s, ET=>t);
(*единичный импульс при необходимости смены каналов*)
trig(CLK:=t<time_sm);
IF trig.Q THEN (*если надо сменить канал индикации*)
IF num_chan<3 THEN (*если отображаемый канал не последний*)
num_chan:=num_chan+1;(*переходим на следующий канал*)
ELSE (*если отображается последний канал*)
num_chan:=1; (*переходим на первый канал*)
END_IF
END_IF
(*присвоение выходному значению значение величины требуемого канала*)
CASE num_chan OF
1: out:=sig_1;
2: out:=sig_2;
3: out:=sig_3;
END_CASE
Четырёхканальный блок циклической индикации
Даны две групп параметров, по 4 параметра в каждой группе. Для каждого параметра – своя шкала. Реализация этого блока аналогична реализации предыдущего блока, но в данном случае добавляется индивидуальное преобразование величин каждого параметра по своей шкале, и параметры группируются в 2 группы по 4 параметра в каждом. В один момент времени выводится 4 параметра одной группы. Группировка происходит следующим образом: параметры 1-4 попадают в первую группу, параметры 5-8 – во вторую.
Преобразование величин по шкалам производится с помощью блока LIN_TRAFO из библиотеки «Util», входящей в стандартный комплект поставки среды CodeSys. Описание этого блока доступно в справочной системе CodeSys.
FUNCTION_BLOCK cycle_ind_2 (*блок циклической индикации*)
VAR_INPUT
sig_1: REAL; (*величина сигнала на входе*)
sig_1_in_min: REAL:= 0; (*минимальное значение сигнала на входе*)
sig_1_in_max: REAL:= 100; (*максимальное значение сигнала на входе*)
sig_1_out_min: REAL:= 0; (*минимальное значение сигнала на выходе*)
sig_1_out_max: REAL:= 100; (*максимальное значение сигнала на выходе*)
sig_2: REAL;
sig_2_in_min: REAL:= 0;
sig_2_in_max: REAL:= 100;
sig_2_out_min: REAL:= 0;
sig_2_out_max: REAL:= 100;
sig_3: REAL;
sig_3_in_min: REAL:= 0;
sig_3_in_max: REAL:= 100;
sig_3_out_min: REAL:= 0;
sig_3_out_max: REAL:= 100;
sig_4: REAL;
sig_4_in_min: REAL:= 0;
sig_4_in_max: REAL:= 100;
sig_4_out_min: REAL:= 0;
sig_4_out_max: REAL:= 100;
sig_5: REAL;
sig_5_in_min: REAL:= 0;
sig_5_in_max: REAL:= 100;
sig_5_out_min: REAL:= 0;
sig_5_out_max: REAL:= 100;
sig_6: REAL;
sig_6_in_min: REAL:= 0;
sig_6_in_max: REAL:= 100;
sig_6_out_min: REAL:= 0;
sig_6_out_max: REAL:= 100;
sig_7: REAL;
sig_7_in_min: REAL:= 0;
sig_7_in_max: REAL:= 100;
sig_7_out_min: REAL:= 0;
sig_7_out_max: REAL:= 100;
sig_8: REAL;
sig_8_in_min: REAL:= 0;
sig_8_in_max: REAL:= 100;
sig_8_out_min: REAL:= 0;
sig_8_out_max: REAL:= 100;
time_sm: TIME; (*время смены каналов*)
END_VAR
VAR_OUTPUT
out_1: REAL; (*величина сигнала отображаемого канала*)
out_2: REAL;
out_3: REAL;
out_4: REAL;
num_chan: BYTE; (*номер отображаемого канала*)
END_VAR
VAR
tm: TON; (*таймер*)
t: TIME; (*прошедшее время от последней смены каналов*)
trig: F_TRIG; (*триггер заднего фронта для определения момента
смены каналов*)
lf1: LIN_TRAFO; (*пересчёт значений канала*)
END_VAR
(*отсчитываем время*)
tm(IN:=t<time_sm, PT:=time_sm+T#1s, ET=>t);
(*единичный импульс при необходимости смены каналов*)
trig(CLK:=t<time_sm);
IF trig.Q THEN (*если надо сменить канал индикации*)
IF num_chan<2 THEN (*если отображаемый канал не последний*)
num_chan:=num_chan+1; (*переход на следующий канал*)
ELSE (*если отображается последний канал*)
num_chan:=1; (*переход на первый канал*)
END_IF
END_IF
(*присвоение выходному значению значения сигнала с учётом шкалы*)
CASE num_chan OF
1: lf1(IN:=sig_1, IN_MIN:=sig_1_in_min, IN_MAX:=sig_1_in_max
,OUT_MIN:=sig_1_out_min, OUT_MAX:=sig_1_out_max, OUT=>out_1);
lf1(IN:=sig_2, IN_MIN:=sig_2_in_min, IN_MAX:=sig_2_in_max
,OUT_MIN:=sig_2_out_min, OUT_MAX:=sig_2_out_max, OUT=>out_2);
lf1(IN:=sig_3, IN_MIN:=sig_3_in_min, IN_MAX:=sig_3_in_max
,OUT_MIN:=sig_3_out_min, OUT_MAX:=sig_3_out_max, OUT=>out_3);
lf1(IN:=sig_4, IN_MIN:=sig_4_in_min, IN_MAX:=sig_4_in_max
,OUT_MIN:=sig_4_out_min, OUT_MAX:=sig_4_out_max, OUT=>out_4);
2: lf1(IN:=sig_5, IN_MIN:=sig_5_in_min, IN_MAX:=sig_5_in_max
,OUT_MIN:=sig_5_out_min, OUT_MAX:=sig_5_out_max, OUT=>out_1);
lf1(IN:=sig_6, IN_MIN:=sig_6_in_min, IN_MAX:=sig_6_in_max
,OUT_MIN:=sig_6_out_min, OUT_MAX:=sig_6_out_max, OUT=>out_2);
lf1(IN:=sig_7, IN_MIN:=sig_7_in_min, IN_MAX:=sig_7_in_max
,OUT_MIN:=sig_7_out_min, OUT_MAX:=sig_7_out_max, OUT=>out_3);
lf1(IN:=sig_8, IN_MIN:=sig_8_in_min, IN_MAX:=sig_8_in_max
,OUT_MIN:=sig_8_out_min, OUT_MAX:=sig_8_out_max, OUT=>out_4);
END_CASE
В результате применения БЦИ количество контролируемых на ЛП параметров увеличилось в десятки раз. При этом резко сокращается число нажатий клавиш оператором при просмотре значений параметров. Принцип работы блока циклической индикации является общим и может использоваться на других контроллерах.
Программный регулятор
Программный регулятор реализован с использованием библиотеки oscat (файл «oscat_basic__codesys2_321.lib»). Полное описание этой библиотеки находится в файле «oscat_basic_doc_332_en.pdf}».
Регулятор состоит из блока задания уставки (prg) по заданной программе (задаётся три уставки, время выдержки первых двух и время перехода между уставками), блока защиты уставки (protect_ust), блока ограничения скорости изменения уставки (org_speed_ust), блока защиты аналогового сигнала обратной связи (protect_input_sig), блока ПИД-регулятора (pid_reg1) и блока ограничения скорости изменения выходной величины регулятора (org_speed_out_reg). Кроме этого в программе имеются блок, имитирующий объект управления в виде апериодического звена первого порядка (ob), и блока, имитирующего реальный измерительный канал с некоторой погрешностью измерения и с возможностью имитации выброса, провала и обрыва в данном канале.
Программа регулятора вместе с описанными блоками:
PROGRAM p2
VAR
pid_reg1: pid_reg; (*регулятор*)
y: REAL; (*выходная величина объекта*)
i_reset: BOOL:=FALSE; (*сброс интегральной составляющей регулятора*)
i_enable: BOOL:=TRUE; (*включение интегральной составляющей регулятора*)
manual_enable: BOOL; (*включение ручного режима работы регулятора*)
var_manual: REAL; (*величина выходного сигнала регулятора в ручном режиме*)
ob: FT_PT1; (*модель объекта управления*)
kp: REAL:=2; (*коэффициент пропорциональности регулятора*)
ti: REAL:=16; (*постоянная времени интегрирования регулятора*)
td: REAL:=4; (*постоянная времени дифференцирования регулятора*)
protect_input_sig: mprotect_analog; (*защита входного аналогового сигнала*)
protect_ust: mprotect_ust; (*защита уставки*)
kanal: real_kan; (*модель канала измерения*)
org_speed_ust: FT_RMP; (*ограничение скорости изменения уставки*)
org_speed_out_reg: FT_RMP;(*ограничение скорости изменения выходного сигнала регулятора*)
prg: prog_ust; (*программа изменения уставки*)
b4: BOOL; (*разрешение работы блока prg*)
b5: BOOL; (*сброс блока prg*)
END_VAR
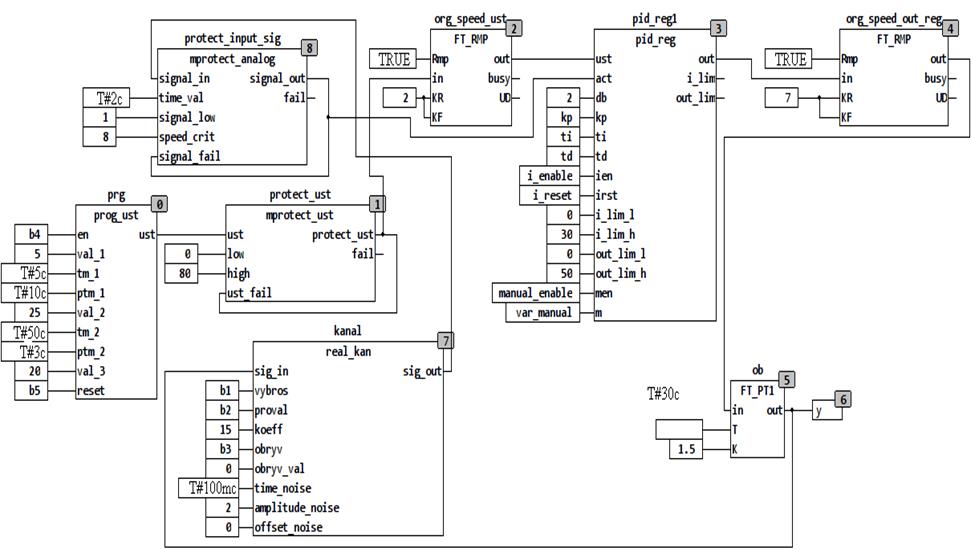
Рис. 99. Программа регулятора с изменением задания во времени
FUNCTION_BLOCK pid_reg
VAR_INPUT
ust: REAL:=0;
act: REAL:=0;
db: REAL:=0;
kp: REAL:=1;
ti: REAL:=1;
td: REAL:=1;
ien: BOOL:=TRUE;
irst: BOOL:=FALSE;
i_lim_l: REAL:=-100;
i_lim_h: REAL:=100;
out_lim_l: REAL:=-100;
out_lim_h: REAL:=100;
men: BOOL:=FALSE;
m: REAL:=0;
END_VAR
VAR_OUTPUT
out: REAL;
i_lim: BOOL;
out_lim: BOOL;
END_VAR
VAR
pid1: FT_PID;
out1: CTRL_OUT;
END_VAR

Рис. 100. Программа простого (стандартного ПИ-регулятора) регулятора
FUNCTION_BLOCK prog_ust (*программа для формирования задания (уставки)*)
VAR_INPUT
en: BOOL; (*разрешить работу блока*)
val_1: REAL; (*стартовое значение уставки*)
tm_1: TIME; (*время выдержки val_1*)
ptm_1: TIME; (*время перехода от val_1 к val_2*)
val_2: REAL; (*уставка 2*)
tm_2: TIME; (*время выдержки val_2*)
ptm_2: TIME; (*время перехода от val_2 к val_3*)
val_3: REAL; (*завершающая уставка*)
reset: BOOL; (*сброс*)
END_VAR
VAR_OUTPUT
ust: REAL;
END_VAR
VAR
tmr: TON; (*таймер*)
t: TIME; (*текущее время*)
lf: lin_trafo; (*линейное преобразование для плавного перехода с одного задания на другое(на другую уставку)*)
END_VAR
(*если работа блока разрешена*)
IF en THEN
(*выполняем отсчёт времени*)
tmr(IN:=NOT(reset), PT:=tm_1+ptm_1+tm_2+ptm_2+T#1s, ET=>t);
(*если не сброс блока и не завершение счёта таймера*)
IF NOT(reset) AND NOT(tmr.Q) THEN
(*если время уставки 1*)
IF t<=tm_1 THEN
ust:=val_1;
(*если время перехода с уставки 1 на уставку 2*)
ELSIF t>tm_1 AND t<=tm_1+ptm_1 THEN
lf(IN:=TIME_TO_REAL(t-tm_1), IN_MIN:=0, IN_MAX:=TIME_TO_REAL(ptm_1)
,OUT_MIN:=val_1, OUT_MAX:=val_2, OUT=>ust);
(*если время уставки 2*)
ELSIF t>tm_1+ptm_1 AND t<=tm_1+ptm_1+tm_2 THEN
ust:=val_2;
(*если время перехода с уставки 2 на уставку 3*)
ELSIF t>tm_1+ptm_1+tm_2 AND t<=tm_1+ptm_1+tm_2+ptm_2 THEN
lf(IN:=TIME_TO_REAL(t-tm_1-ptm_1-tm_2), IN_MIN:=0, IN_MAX:=TIME_TO_REAL(ptm_2)
,OUT_MIN:=val_2, OUT_MAX:=val_3, OUT=>ust);
(*если время уставки 3*)
ELSE
ust:=val_3;
END_IF
END_IF
END_IF
(*если сброс*)
IF reset THEN ust:=val_1; END_IF
FUNCTION_BLOCK real_kan
VAR_INPUT
sig_in:REAL;
vybros: BOOL;
proval: BOOL;
koeff: REAL;
obryv: BOOL;
obryv_val: REAL;
time_noise:TIME;
amplitude_noise: REAL;
offset_noise:REAL;
END_VAR
VAR_OUTPUT
sig_out: REAL;
END_VAR
VAR
gen_random: GEN_RDM;
END_VAR
gen_random(
PT:=time_noise
,AM:=amplitude_noise
,OS:=offset_noise);
IF obryv THEN
sig_out:=obryv_val;
ELSE
sig_out:=
sig_in
+gen_random.Out
+koeff*BOOL_TO_REAL(vybros)
-koeff*BOOL_TO_REAL(proval);
END_IF
оглавление
| Введение…………………………………………………………………...........
|
|
| 1. Технические характеристики контроллеров……………………………….
|
|
| 2. Структура алгоблока. Последовательность обслуживания алгоблоков…
|
|
| 2.1. Структура алгоблоков…………………………………………………..
|
|
| 2.2. Последовательность обслуживания алгоблоков……...........................
|
|
| 3. Простой ПИД-регулятор…………………………………………………….
|
|
| 3.1. Алгоритмы, входящие в состав простого регулятора………………...
|
|
| 3.2. Безударные переключения регулятора………………………………...
|
|
| 3.3. Назначение и оценка зоны нечувствительности……………………...
|
|
| 4. Модификация ПИД-регулятора………………………………….
|
|
| 5. Программный регулятор с ПРЗ…………………..........................................
|
|
| 6. Программный регулятор с КУС……………………….................................
|
|
| 7. Регулятор с переменной структурой……………………………………….
|
|
| 7.1. Комбинированный регулятор с переменной структурой………….....
|
|
| 7.2. Реализация привязки по каналу возмущения……………....................
|
|
| 8. Регулятор повышенной надёжности………………………………………..
|
|
| 8.1. Конфигурационная таблица программы 1…………………….............
|
|
| 8.2. Программа защиты по аналоговому каналу………………..................
|
|
| 8.3. Конфигурационная таблица программы 2………………….................
|
|
| 8.4. Алгоритм простого алгоритма мажоритарного выбора……….........
|
|
| 8.5. Программа простого алгоритма мажоритарного выбора ….........
|
|
| 9. САР соотношения растворов реагентов……………………………………
|
|
| 9.1. Простой регулятор соотношения………………………………………
|
|
| 9.2. Программа регулирования соотношения расходов…………………..
|
|
| 9.3. Регулятор соотношения с переключением каналов……......................
|
|
| 10. Регулятор с автоподстройкой………………………….................................
|
|
| 11. Каскадный регулятор………………………………………………………..
|
|
| 12. Регулятор обратного действия…………………….......................................
|
|
| 12.1. Формирование запрета………………………………………………...
|
|
| 12.2. Конфигурационная таблица……………………..................................
|
|
| 13. Таблицы приёма, передачи и отображения параметров…………………..
|
|
| 13.1. Спецификация разработанных программ………………....................
|
|
| 13.2. Отображение информации на ЛП контроллера 02………..................
|
|
| 13.3. Таблица перечня параметров………………........................................
|
|
| 13.4. Передача информации в сеть «Транзит»…………………………….
|
|
| 13.5. Приём информации из сети «Транзит»…………................................
|
|
| 13.6. Отображение информации на ЛП контроллера 03………………….
|
|
| 14. Организация связи сети контроллеров с верхним уровнем………………
|
|
| 15. Документы, прикладываемые к ПО САР……..............................................
|
|
| 16. Пути совершенствования САР на базе контроллеров…………………….
|
|
| 16.1. Повышение эффективности кросс-средств………..............................
|
|
| 16.2. Пути совершенствования библиотек алгоритмов…………………...
|
|
| Заключение………………………….....................................................................
|
|
| Список литературы………………………………………………………………
|
|
| Приложение А. Модули УСО…………………………………………………..
|
|
| Приложение Б. Диапазон изменения сигналов и параметров………………...
|
|
| Приложение В. Типы сигналов и их соответствие………................................
|
|
| Приложение Г. Справочная информация по алгоритмам……….....................
|
|
| Приложение Д. Ряд Пада………………………………………………………..
|
|
| Приложение Ж. Проверка на достоверность аналоговых сигналов………….
|
|
| Приложение З. Выбор исправного канала из двух……………………………
|
|
| Приложение И. Контрольные вопросы по темам…….....................................
|
|
| Приложение К. Задания по обратному программированию…………………
|
|
| Приложение Л. Принципы программирования………………………………..
|
|
| Приложение М. Блок циклической индикации……..........................................
|
|
| Приложение Н. Фрагменты работы Быкова А.Ю. ……………………………
|
|
Севастьянов Борис Георгиевич






