

Таксономические единицы (категории) растений: Каждая система классификации состоит из определённых соподчиненных друг другу...

Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
Таксономические единицы (категории) растений: Каждая система классификации состоит из определённых соподчиненных друг другу...
Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
Топ:
Устройство и оснащение процедурного кабинета: Решающая роль в обеспечении правильного лечения пациентов отводится процедурной медсестре...
Организация стока поверхностных вод: Наибольшее количество влаги на земном шаре испаряется с поверхности морей и океанов...
Интересное:
Лечение прогрессирующих форм рака: Одним из наиболее важных достижений экспериментальной химиотерапии опухолей, начатой в 60-х и реализованной в 70-х годах, является...
Наиболее распространенные виды рака: Раковая опухоль — это самостоятельное новообразование, которое может возникнуть и от повышенного давления...
Финансовый рынок и его значение в управлении денежными потоками на современном этапе: любому предприятию для расширения производства и увеличения прибыли нужны...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
Алгоритмическая часть контроллера является важнейшей для создания надёжных и эффективных АСУ ТП. Затрагиваемая здесь тема требует дополнительного анализа и написания отдельного пособия. Автор счёл необходимым обратить внимание на важность данного направления [34].
Работа с библиотекой контроллера Р-130 и библиотеками других контроллеров навела на мысль о необходимости совершенствования этих библиотек. Должны соблюдаться основные принципы построения алгоритмов: единства обозначений аналогичных функций, команд, переменных; единства нумераций входов и выходов; по умолчанию должны устанавливаться те значения параметров, которые наиболее вероятны, часто используются и согласуются со здравым смыслом; однозначность реагирования одного и того же алгоритма на одинаковую команду, прозрачность алгоритмов (то есть должны быть не только входы-выходы, а сам алгоритм преобразования информации) и т.д. Рассмотрим некоторые моменты на примерах библиотек контроллеров Р-130, КР-300. Для сокращения пояснений описания приводятся алгоритмы из библиотеки как есть и как он должен выглядеть. Начнём с задатчика – алгоритма ПРЗ (рис. 13). По ходу изложения высказываются критические замечания не для исправления существующих библиотек, а для создания нового программного обеспечения, не повторяющего «старые» ошибки.
ПРЗ – Программный задатчик

Рис. 45
На входе имеем команды: Сп – пуск; Сст – стоп; Ссбр – сброс. интуитивно всё понятно. Начинаем анализировать принцип построения кусочно-линейной функции (график изменения задания): по оси Х координаты надо задавать в приращениях (рис. 14, с.22); при работе контроль времени от начала работы программного регулятора отсутствует. На рис. 46 показано, как должна строиться (задаваться) кусочно-линейная функция.
|
|
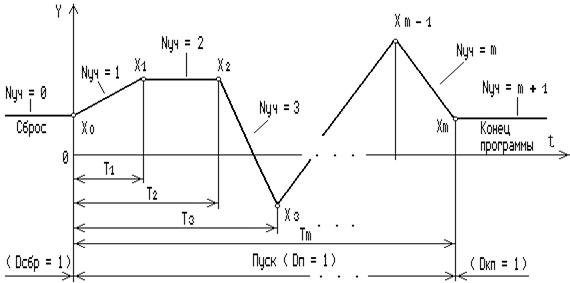
Рис. 46
ТМР – Таймер

Рис. 47. Исходный алгоритм
Следует заметить, что модификатор в таймере задаёт количество пороговых элементов (нуль-органов), а таймер – один. Как только программа с ТМР загрузится в ОЗУ, алгоритм ТМР начинает работать сразу, то есть его не надо пускать. В учебных пособиях [25, 26] указывалось, что такая работа алгоритма может приводить к авариям и получению инвалидности рабочих, наладчиков. Ведь в ПРЗ имеются три команды, почему же здесь – две? Вторая ошибка – с точки зрения системотехники. Зачем для данного алгоритма второстепенный выход текущего времени таймера выдавать по первому выходу? Это приводит с смещению на единицу при конфигурировании (см. реализацию циклограмм [27]). Программист находится в постоянном напряжении. Конечно, в этом случае разработчик не по злому умыслу реализовал такой недружественный человеко-машинный интерфейс. Если анализировать современные программные средства, например CoDeSys, то, на взгляд автора, и там имеются необъятные возможности для совершенствования. Продолжим наш анализ и рассмотрим его результат для алгоритма ТМР. На рис. 48 представлен модифицированный таймер.
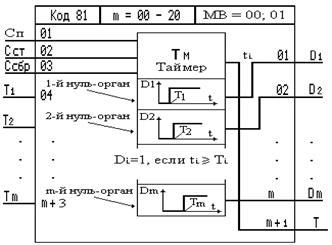
Рис.48. Алгоритм ТМР после модификации
Добавлена команда Пуск Сп. В этом случае таймер алгоритма должен начинать работать не сам, а только после подачи команды «Пуск». Изменена нумерация и выходных сигналов. Выход с таймера опущен в конец (m + 1 – выход). При такой реализации алгоритма станут проще и нагляднее программы, уменьшатся ошибки при проектировании и эксплуатации программного обеспечения, что повышает надёжность систем автоматического контроля и управления.
СЧТ – Счётчик

| 
|
| Рис. 49. Исходный алгоритм | Рис. 50. Алгоритм СЧТ после модификации |
В алгоритме СЧТ команда «Пуск» не нужна, так как счётчик начинает считать, когда появляются на входе импульсы. Поэтому команда Пуск отсутствует. Команды Сст и Ссбр можно подвинуть вверх.
|
|
ОДВ – Одновибратор

| 
|
| Рис. 51. Исходный алгоритм | Рис. 52. Модифицированный алгоритм |
В начале раздела дана расшифровка сокращений и обозначений: Сп – команда ПУСК; Ссбр – команда СБРОС; Т – время, определяющее длительность импульса. Алгоритм ОДВ тоже должен иметь модификатор, как это реализовано в контроллере КР-300. Следует тщательно проверять все используемые алгоритмы, прежде чем использовать их в программах и системах,особенно для объектов повышенной опасности. Например, об ошибке в работе алгоритма ОДВ из библиотеки алгоритмов контроллера Р-130, указывалось в пособиях [26, 27].
МУВ – Мультивибратор


Рис. 53. МУВ исходный Рис. 54. МУВ после модификации
НОР – Нуль-орган

Рис. 55
Алгоритм НОР может использоваться в блоке сигнализации [94]. В качестве Хб принимают (задают) верхнюю технологическую границу (ВГ). Хм соответствует нижней технологической границе (НГ). DХ – величина гистерезиса задаётся исходя из погрешности измерительного канала. На рисунках показана суть работы сигнализации без гистерезиса и с его наличием. Данный алгоритм нареканий не имеет. К сожалению, многих полезных алгоритмов нет в имеющихся в институте библиотеках алгоритмов ПЛК-150, 154 и др. Поэтому они создаются на языке CFC в CoDeSys. Например, блок с функциями, аналогичными алгоритму НОР, представлен на рис. 56. Аналогичный алгоритм пришлось разработать и для контроллера ILC 130 ETH (Phoenix Contact) среде разработки PC WORX.

Рис. 56. Программа НОР-органа
Vg – верхняя граница; ng – нижняя граница; gist – величина гистерезиса; wg – признак нарушения верхней границы; vng – признак нарушения нижней границы.
ПОК – Пороговый контроль
В каждом канале входной сигнал Хi сравнивается с двумя уставками: верхней Хв,i и нижней Хн,i. Если Хн,i < Хi < Хв,i, то дискретный сигнал на выходе канала равен логическому 0. В противном случае этот сигнал равен логической 1.
Если хотя бы один из контролируемых сигналов достигнет заданной для него уставки (порога), выходной сигнал D = 1, иначе D = 0. На выходе N формируется номер входного сигнала i, в котором сигнал Хi <= Хн,i или Хi >= Хв,i. В каждом канале предусмотрен фиксированный гистерезис равный 0,2 %.
|
|
Если одновременно несколько сигналов достигли уставки, N равно младшему номеру из этих сигналов.
Исходя из общего подхода при создании новой библиотеки алгоритмов выход перенесём вниз. И в каждом канале добавим гистерезис. У алгоритма НОР в каждой ячейке предусмотрено задание гистерезиса, рис. 57. Получается, что у одних пороговых элементов предусмотрена возможность задания величины гистерезиса по каждому каналу, а у этого алгоритма нет. Чем алгоритм ПОК хуже?
Следует отметить, что у большинства контроллеров весьма слабые алгоритмы статистической обработки сигналов. Отсутствуют корректные алгоритмы регрессионного анализа, оценки коэффициентов корреляции, корреляционных функций, алгоритмы спектрального анализа. Должна иметься возможность осуществления настроек регуляторов различными методами [6, 22, 35, 107, 108, 109, 111, 115, 119, 120] с указанием алгоритма настройки (в методических целях и в целях возможного совершенствования предложенных разработчиком алгоритмов). Системы моделирования должны учитывать особенности конкретного контроллера (точность задания параметров и настроек, время цикла и др.).

Рис. 57. Исходный алгоритм ПОК

Рис. 58. Модифицированный алгоритм ПОК
Значения параметров и настроек по умолчанию должны задаваться такими, которые наиболее часто используются, являются наиболее вероятными.
Возьмем алгоритм ОКО контроллера Р-130. Модификатор m здесь не связан с количеством алгоритмов в одном алгоблоке, а используется для установки
режимов работы регулятора (ниже приведена часть таблицы, табл. 21). Казалось бы, следовало бы установить значение 03, но нет – по умолчанию установлен ноль. Поэтому каждый раз при вызове алгоритма ОКО надо не забыть поставить модификатор равный трём. Если оставить модификатор равный нулю, то режим внешнего задания и режим дистанционного управления будут недоступны. Просто так изменить модификатор нельзя, потребуется удалить этот блок, вновь вызвать данный алгоритм и установить новый модификатор и восстановить все связи, так как после удаления все связи тоже удаляются.
|
|
Таблица 21
| Вид регулятора | Режимы | Модификатор в алгоритме ОКО m | |
| внешнего задания (внш) | дистанционного управления (дст) | ||
| Обычный аналоговый | – – + + | – + – + |
Возьмём алгоритм ввода интерфейсный, алгоритм ВИН. В контроллере КР-300 на всех входах установили по умолчанию значение равное единице. Зачем принимать в контроллер несколько раз одно и то же значение? В контроллере Р-130 сделано гораздо лучше. В алгоритме ВИН по умолчанию задан ряд натуральных чисел: 1, 2, 3 и т.д. К сожалению, в контроллере КР-300 в алгоритмы ОКР, НОР и ряд других внесли изменения не в лучшую сторону.
Вопросы, затронутые в этом разделе, должны явиться толчком для продолжения исследований в области кросс-средств и совершенствования библиотек алгоритмов промышленных контроллеров.
Заключение
В пособии рассмотрены различные регуляторы и приведены программы, реализующие эти регуляторы.
1. Структура регулятора повышенной надёжности уменьшает вероятность ложного срабатывания регулятора при различных ситуациях: ошибках оператора, отказе измерительного канала или отказе исполнительного механизма.
2. Команды управления должны учитывать особенности объекта управления.
3. По входным каналам для дискретных сигналов должна быть защита от «дребезга» и случайного кратковременного исчезновения сигнала.
4. По каждому аналоговому каналу необходимо предусматривать защиту от сбоя или отказа измерительного канала.
5. При написании программы на языке FBD на входе в программу необходимо использовать промежуточный программный клеммник.
6. В большинстве случаев целесообразно реализовывать регуляторы повышенной надёжности с автоподстройкой.
7. Для объектов с запаздыванием целесообразно реализовывать, например, регулятор с упредителем Смита.
8. Для сокращения времени оформления лабораторных и курсовых работ рекомендуется использовать формы конфигурационных таблиц, таблиц отображения информации, таблиц приёма и выдачи информации в локальную сеть, приведённые в пособии.
9. Рекомендуется использовать алгоритмы получения схем программ в формате AutoCAD, конфигурационных таблиц по методике, предложенной в пособии [27].
10. Прежде чем использовать алгоритмы и программы для объектов повышенной опасности, следует их тщательно проверять для различных режимов и всех возможных и даже для маловероятных ситуаций.
Автор надеется, что высказанные идеи и рекомендации позволят совершенствовать математическое и программное обеспечение современных контроллеров.
Список Литературы
Основная литература
|
|
1. А.с. 1263691 СССР, МКИ С 07 С 11/18, G 05 D 27/00. Способ автоматического регулирования процесса синтеза диметилдиоксана / Б.Г. Севастьянов и др. – № 3881170/23-26; Заяв.03.04.85; Опубл. 15.10.86.
2. Балакирев В.С. Экспериментальное определение динамических характеристик промышленных объектов управления / В.С. Балакирев, Е.Г. Дудников, А.М. Цирлин. – М.: Энергия, 1967. – 232 с.
3. Гольцов А.С. Выполнение курсовых проектов и курсовых работ по дисциплине «Микропроцессорные системы управления» / А.С. Гольцов, М.А. Трушников, Б.Г. Севастьянов. – Волгоград, 2012. – 20 с.
4. Васильев С.Н. От классических задач регулирования к интеллектуальному управлению / С.Н. Васильев // Изв. РАН. ТиСУ. – 2001. – № 2. – С. 5-21.
5. Глушков В.М. Введение в АСУ / В.М. Глушков. – Киев: Технiка, 1972. – 310 с.
6. Дианов В.Г. Автоматическое регулирование и регуляторы в химической промышленности / В.Г. Дианов. – М.: Химия, 1978. – 376 с.
7. Догановский С.А. Устройства запаздывания и их применение в автоматических системах / С.А. Догановский, В.А. Иванов // Машиностроение. – 1966. – 280 с.
8. Захаров В.Н. Интеллектуальные системы управления: основные понятия и определения / В.Н. Захаров // Изв. РАН. ТиСУ. – 1997. – № 3.
9. Ицкович Э.Л. Алгоритмы централизованного контроля и управления производством / Э.Л. Ицкович, Э.А. Трахтенгерц. – М.: Советское радио, 1967. – 352 с.
10. Севастьянов Б.Г. Система автоматического регулирования соотношения растворов реагентов / Б.Г. Севастьянов // Нефтепереработка и нефтехимия. – 2009. – № 5. – С. 36-38.
11. Кажичкин С. Алгоритм синтеза упредителя Смита в одноконтурных САР / С. Кажичкин, Б.Г. Севастьянов // Приборы и системы управления. – 2010. – № 1.
12. Кажичкина Е.А. Выбор исправного измерительного канала с использованием микропроцессорной техники: XIV Межвузовская научно-практическая конференция молодых ученых и студентов г. Волжского (24-26 мая 2010 г.). Секция № 2: «Информационно-измерительные и управляющие системы» / Е.А. Кажичкина, Б.Г. Севастьянов.
13. Микропроцессорный контроллер Ремиконт Р-130. – М.: НИИТЕПЛОПРИБОР, 1990. – 330 с.
14. Контроллеры многофункциональные КР-500. Руководство по эксплуатации КГЖТ.421457.005 РЭ.
15. Новосёлов, А.И. Автоматическое управление / А.И. Новосёлов. – Л.: Энергия, 1973. – С. 152-162.
16. Ротач В.Я. Теория автоматического управления / В.Я. Ротач. – М.: Издательский дом МЭИ, 2007. – С. 229-234.
17. Руководство пользователя по программированию ПЛК в CoDeSys 2.3. – Смоленск: ПК Пролог, 2007. – 400 с.
18. Визуализация CoDeSys. Дополнение к руководству пользователя по программированию ПЛК в CoDeSys 2.3. – Смоленск: ПК Пролог, 2007. – 150 с.
19. Перов В.Л. Основы теории автоматического регулирования химико-технологических процессов / В.Л. Перов. – М.: Химия, 1979. – 351 с.
20. Севастьянов Б.Г. Работа на лабораторном стенде по изучению микропроцессорного контроллера Ремиконт-130: Методические указания к лабораторным работам. Ч 1 и Ч. II / Б.Г. Севастьянов. – Волжский: ВФ МЭИ (ТУ), 2002.
21. Севастьянов Б.Г. Алгоритмы, повышающие надёжность АСУ ТП: Вторая Всероссийская научно-практическая конференция «Ресурсо-энергосбережение и эколого-энергетическая безопасность промышленных городов». г. Волжский, 23-26 сентября 2008 г. / Б.Г. Севастьянов. – Волжский: ВФ МЭИ (ТУ), 2008. – с. 117-122.
22. Севастьянов Б.Г. Безударность и надёжность систем автоматического регулирования / Б.Г. Севастьянов // Приборы и системы управления. – 2007. – № 12. – с. 1-4.
23. Севастьянов Б.Г. Программная реализация блока сигнализации на микропроцессорной технике / Б.Г. Севастьянов // Нефтепереработка и нефтехимия. – 2007. – № 10. – с. 43-45.
24. Севастьянов Б.Г. Проектирование микропроцессорных систем управления, Ч. I / Б.Г. Севастьянов. – Волгоград, 2007. – 100 с.
25. Севастьянов Б.Г. Проектирование микропроцессорных систем управления, Ч. II / Б.Г. Севастьянов. – Волгоград, 2009. – 196 с.
26. Севастьянов Б.Г. Разработка дискретных систем контроля и управления: Учебное пособие / Б.Г. Севастьянов.–Волжский: Филиал МЭИ (ТУ), 2010.– 162с.
27. Севастьянов Б.Г. Реализация дискретных систем управления на контроллерах: Учебное пособие / Б.Г. Севастьянов. – Волгоград, 2012. – 230 с.
28. Севастьянов Б.Г. Реализация законов аналогового регулирования на контроллерах: Учебное пособие / Б.Г. Севастьянов. – Волгоград, 2013. – 171 с.
29. Севастьянов Б.Г. Система автоматического регулирования соотношения растворов реагентов: Третья всесоюзная конференция «Динамика процессов и аппаратов химической технологии» (8-12 октября 1990 года) / Б.Г. Севастьянов. – Воронеж, 1990. – с. 136.
30. Севастьянов Б.Г. Система автоматического регулирования соотношения растворов реагентов: Межрегиональная конференция «Моделирование и создание объектов энерго- и ресурсосберегающих технологий», г. Волжский, 20-23 сентября 2012 г. / Б.Г. Севастьянов. – Волжский: Филиал МЭИ в г. Волжском, 2012.
31. Севастьянов Б.Г. Стабилизация соотношения изобутилена и формальдегида в процессе синтеза ДМД (ПМ). СМОФАП. – Киев, 1984-рег. ном. П008049. Инв. ном. 21054.
32. А.с. 1263691 СССР, МКИ С 07 С 11/18, G 05 D 27/00. Способ автоматического регулирования процесса синтеза диметилдиоксана / Б.Г. Севастьянов и др. – № 3881170/23-26; Заяв. 03.04.85; Опубл. 15.10.86.
33. Браганец С.А. Повышение надежности измерительной информации / С.А. Браганец, А.В. Савчиц, Б.Г. Севастьянов // Промышленные АСУ и контроллеры. – 2012. – № 2. – С. 46-49.
34. Севастьянов Б.Г. Повышение качества библиотек промышленных контроллеров// Промышленные АСУ и контроллеры. 2014, № 1.-с.37-46.
35. Эрриот П. Регулирование производственных процессов / П. Эрриот. – М.: Энергия, 1967. – 480 с.
Дополнительная литература
36. ГОСТ 19.003-80. Схемы алгоритмов и программ. Обозначение условные графические.
37. ГОСТ 19.101-77. Виды программ и программных документов (спецификация; ведомость держателей подлинников; текст программы; описание программы; программа и методика испытаний; ТЗ; пояснительная записка: схема алгоритма, его описание, обоснование выбранного метода расчёта; эксплуатационные документы: формуляр, руководство системного программиста, руководство программиста, руководство оператора, описание языка).
38. ГОСТ 19.001-77. Общие положения.
39. ГОСТ 19.301-79. Программа и методика испытаний. Требования к содержанию и оформлению.
40. ГОСТ 19.004-80. Термины и определения (Заменен на ГОСТ 19781-90).
41. ГОСТ 19.005-85. Р-схемы алгоритмов и программ. Обозначения условные графические и правила их выполнения.
42. ГОСТ 19.102-77. Стадии разработки.
43. ГОСТ 19.104-78. Основные надписи.
44. ГОСТ 19.105-78. Общие требования к оформлению программной документации (с учётом ПЭВМ).
45. ГОСТ 19.202-78. Спецификация. Требования к содержанию и оформлению.
46. ГОСТ 19.401-78. Текст программы.
47. ГОСТ 19.402-78. Описание программы.
48. ГОСТ 19.502-78. Описание применения.
49. ГОСТ 19.503-79. Руководство системного программиста.
50. ГОСТ 19.504-79. Руководство программиста.
51. ГОСТ 19.505-79. Руководство оператора.
52. ГОСТ 19.506-79. Описание языка.
53. ГОСТ 19.508-79. Руководство по техническому обслуживанию.
54. ГОСТ 19.701-90. Схемы алгоритмов, программ, данных и систем.
55. ГОСТ 2.301-2.316.
56. ГОСТ 24104-85 (Указывается гарантийный срок для АСУ ТП –18 месяцев).
57. ГОСТ 2.709-89. Обозначения проводов и контактных соединений, электрических элементов, оборудования и участков цепей в электрических схемах.
58. ГОСТ 2.743-82. Обозначения условные графические в схемах.
59. Элементы цифровой техники.
60. ГОСТ 21.404-85. Условные обозначения приборов и средств автоматизации.
61. ГОСТ 21.552-84. Средства вычислительной техники. Защита вычислительной техники от внешних воздействий.
62. ГОСТ 24.204-80. Требования к содержанию документа «описание постановки задачи».
63. ГОСТ 24.206-80. Требования к содержанию документов по техническому обеспечению.
64. ГОСТ 24.207-80. Требования к содержанию документов по программному обеспечению.
65. ГОСТ 24.211-82. Требования к содержанию документа «Описание алгоритма».
66. ГОСТ24.701-86. Надежность АСУ. Основные положения.
67. ГОСТ 25861-83. Безопасность вычислительной техники.
68. ГОСТ 26.011-80. Средства измерений и автоматизации. Сигналы тока и напряжения электрические непрерывные входные и выходные.
69. ГОСТ 27.002-89. Надежность в технике. Основные понятия. Термины и определения.
70. ГОСТ 27883-88. Средства измерения и управления технологическими процессами. Надежность. Общие требования и методы испытаний.
71. ГОСТ 28.806-90. Качество программных средств. Термины и определения.
72. ГОСТ 28147-89. Алгоритмы блочного шифрования и др. Криптозащита.
73. ГОСТ Р В 29.08.001-96 ССЭТО[24]. Эргономическая экспертиза. Основные положения, программы и методики.
74. ГОСТ В 29.00.002-84. ССЭТО. Эргономическое обеспечение. Основные положения.
75. ГОСТ 34.601-90. Автоматизированные системы. Стадии создания.
76. ГОСТ 34.602-89. Техническое задание.
77. ГОСТ 34.201-89. Обозначение документов.
78. ГОСТ 603-92. Виды испытаний автоматизированных систем.
79. ГОСТ Р 50948-2001. Средства отображения информации индивидуального пользования. Общие эргономические требования и требования безопасности.
80. ГОСТ Р 50923-96. Рабочее место оператора. Общие эргономические требования и требования к производственной среде. Методы измерения (Утвержден и введен в действие на территории РФ с 1-го июля 1997 г. Постановлением Госстандарта России от 10 июля 1996 г. № 451).
81. ГОСТ 12.2.003-74. Оборудование производственное. Общие требования безопасности.
82. ГОСТ Р 50948-96. Средства отображения информации индивидуального пользования. Общие эргономические требования и требования безопасности (Утвержден и введен в действие на территории РФ с 1-го июля 1997 г. Постановлением Госстандарта России от 11 сентября 1996 г. № 576).
83. ГОСТ Р 51840-2001(IEC 61131-1-92). Программируемые контроллеры. Общие положения и функциональные характеристики. – М.: Госстандарт России, 2003.
84. ГОСТ Р 51841-2001. Программируемые контроллеры. Общие технические требования и методы испытаний. – М.: Госстандарт России, 2003.
85. Правила устройства электроустановок.
86. Правила техники безопасности при эксплуатации электроустановок потребителей.
87. РТМ 25726-85 Руководящий технический материал по АСУ ТП: Методические указания по составлению и описанию алгоритмов.
88. РТМ25730-85 Технология автоматизированного проектирования программ управления технологическими процессами. – М., 1985.
89. Санитарные правила и нормы СанПиН 2.2.2.542-96.
90. Любашин А.Н. ISaGRAF – современная технология программирования / А.Н. Любашин // Энергетик. – 1998. – № 2. – с. 35-38.
91. Многоцелевой контроллер КР-300 серии Контраст / Н.В. Плескач, С.К. Марков, В.Н. Макаров //Приборы и системы управления.–1998. – № 6. – с. 27-29.
92. Осипов Г. Системы искусственного интеллекта // Компьютера 2002 / Г.Осипов. – № 30 (6 августа).
93. Севастьянов Б.Г. Система автоматического регулирования соотношения растворов реагентов // Нефтепереработка и нефтехимия.- 2009, №5-с.36-38.
94. Севастьянов Б. Г. Программная реализация технологической сигнализации на промышленных контроллерах// Промышленные АСУ и контроллеры. 2012, № 8.-с.50-57.
95. Теория автоматического управления / под редакцией Нетушила А.В. – М.: Высшая школа, 1976. – С. 137-140.
96. Севастьянов Б.Г. Информационный обмен в промышленных контроллерах: [Электронный ресурс]: метод. указания к лабораторной работе № 1 / А.В. Савчиц, Б.Г. Севастьянов // Сборник «Методические указания». Выпуск 1. – Электрон. текстовые дан. (1 файл: 17,4 МБ) – Волжский: ВПИ (филиал) ВолгГТУ, 2011. Номер гос. регистрации 0321100876.
97. Теория автоматического управления / под редакцией Воронова А.А. – М.: Высшая школа, 1977. – с. 239-246.
98. Егоров А.И. Основы теории управления / А.И. Егоров. – М.: Физматлит, 2004. – С. 54-55. – ISBN 5-9221-0543-4.
99. Методы классической и современной теории автоматического управления. Учебник в 3-х томах / Под ред. Н.Д. Егупова. – М.: Изд-во МГТУ им. Баумана, 2000.
100. Алиев Р.А. Промышленные инвариантные системы автоматического управления / Р.А. Алиев. – М.: Энергия, 1971. – 112 с.
101. Уланов Г.М. Регулирование по возмущению / Г.М. Уланов. – Госэнерго-издат, 1960.
102. Емельянов С.В. Системы автоматического управления с переменной структурой / С.В. Емельянов. – М.: Наука, 1967.
103. Панько М.А. Сравнительный анализ классического и нечёткого ПИД алгоритмов. Теория и практика построения и функционирования АСУ ТП / М.А. Панько, Э.К. Аракелян, В.В. Усенко // Сб. науч. тр. МЭИ. – М.: Издательство МЭИ, 1998. – С. 119-126.
104. Лукас В.А. Введение в fuzzy управление: Учебное пособие / В.А. Лукас. – Екатеринбург: Из-во УГГГА, 1997. – 36 с.
105. Peter Bauer, Stephan Nouak, Roman Winkler A brief course in Fuzzy Logic and Fuzzy Control by Version: 1.2. December 4, 1996.
106. Крыжановская Ю.А. Синтез модального регулятора для дискретных систем управления: Труды II научной конференции «Проектирование инженерных и научных приложений в среде MATLAB». Воронежский Государственный Университет, Воронеж, e-mail: [email protected]
107. Кузовков Н.П. Модальное управление и наблюдающие устройства / Н.П. Кузовков. – М.: Машиностроение, 1976.
108. Лозгачев Г.И. Синтез модальных регуляторов по передаточной функции замкнутой системы / Г.И. Лозгачев // АиТ. – 1995. – № 5. – С. 49-55.
109. Александров А.Г. Аналитический синтез регуляторов по заданным показателям качества переходных процессов / А.Г. Александров // Аналитические методы синтеза регуляторов. Межвуз. научн. сб.: Саратов: СПИ, 1978.
110. Бесекерский В.А. Динамический синтез систем автоматического регулирования / В.А. Бесекерский. – М.: Наука, 1970.
111. Бесекерский В.А. Робастные системы автоматического управления / В.А. Бесекерский, А.В. Небылов. – М.: Наука, 1983.
112. Бесекерский В.А. Теория систем автоматического регулирования / В.А. Бесекерский, Е.П. Попов. – М.: Наука, 1972. – 768 c.
113. Наладка автоматических систем управления технологическими процессами: Справочное пособие, под ред. А.С. Клюева. – М.: Энергия, 1977. – 400 с.
114. Берендс Т.К. Элементы и схемы пневмоавтоматики / Т.К. Берендс, Т.К. Ефремова, А.А. Тагаевская. – М.: Машиностроение, 1968. – 310 с.
115. Клюев А.С. Синтез быстродействующих регуляторов для объектов с запаздыванием / А.С. Клюев, В.С. Карпов. – М.: Энергоатомиздат, 1900. – 176 с.
116. Трофимов А.И. Методы теории автоматического управления, ориентированные на применение контроллеров / А.И. Трофимов. – М.: Энергоатомиздат, 1977.
117. Круг Е.К. Цифровые регуляторы / Е.К. Круг, Т.М. Александриди, С.Н. Дилигенский. – М.-Л.: Энергия, 1966.
118. Григорьев В.В. Синтез дискретных регуляторов при помощи ЭВМ / В.В. Григорьев, В.Н. Дроздов, В.В. Лаврентьев, А.В. Ушаков. – Л.: Машиностроение, 1983.
119. Казакевич, А.Н. – Система автоматической оптимизации / А.Н. Казакевич, Б.Р. Родов. – М.: Энергия, 1971.
120. Олейников, В.А. Основы оптимального и экстремального управления / В.А. Олейников, Н.С. Зотов, А.М. Пришвин. – М.: Высшая школа, 1969. – 296 с.
121. Батищев Д.И. Поисковые методы оптимального проектирования. М.: Сов. Радио, 1975.-216с.
122. Никифоров В.О. Управление в условиях неопределенности: чувствительность, адаптация, робастность / В.О. Никифоров, А.В. Ушаков. – СПб.: Изд-во СПбГИТМО (ТУ), 2002.
123. Фрадков, А.Л. Адаптивное управление в сложных системах / А.Л. Фрадков. – М.: Наука, 1990.
124. Хлебалин Н.А. Разработка matlab-версии комплекса программ «анализ и синтез интервальных автоматических систем» Электростальский политехнический институт (филиал) Московского государственного института стали и сплавов, Электростальск-mail:[email protected]
125. Анисимов, Б.В. Аналоговые вычислительные машины / Б.В. Анисимов, В.Н. Голубкин. – М.: Высшая школа, 1971. – 448 с.
126. Корн Г.А. Электронные аналоговые и аналого-цифровые вычислительные машины, пер. с англ., ч. 1, 2 / Г.А. Корн, Т.М. Корн. – М.: 1967.
127. Левин Л. Методы решения технических задач с использованием аналоговых вычислительных машин, пер. с англ. / Л. Левин. – М., 1966.
128. Луценко В.А. Аналоговые вычислительные машины в химии и химической технологии / В.А. Луценко, Л.Н. Финякин. – М.: Химия, 1979. – 248 с.
129. Луценко В.А. Математическое моделирование химико-технологических процессов на АВМ[25] / В.А. Луценко, Л.Н. Финякин. – М.: Химия, 1975. – 336 с.
130. Урмаев А.С. Основы моделирования на АВМ / А.С. Урмаев. – М.: Наука, 1978. – 272 с.
131. Шапоров О.М. Техника работы на электронных моделирующих установках / О.М. Шапоров. – Л.: Энергия, 1967, Библиотека по автоматике.
132. Шандров Б.В. Технические средства автоматизации: Учебник для студентов высших учебных заведений. 2-е изд., стер. / Б.В. Шандров, А.Д. Чудаков. – М.: Академия, 2010. – 368 с.
133. Капля В.И. Программирование микроконтроллеров / В.И. Капля, П.В. Шамигулов, А.А. Силаев, А.Г. Бурцев. – Волгоград: ВолгГТУ, 2010. – 102 с.
134. Капля В.И. Вычислительные машины, системы и сети: Учебное пособие / В.И. Капля Е.В. Капля. – Волгоград, 2011. – 87 с.
135. Лебедев О.Н. Изделия электронной техники. Цифровые микросхемы. Микросхемы ЦАП и АЦП. Справочник / О.Н. Лебедев. – М: Радио и связь, 1994. – 248 с.
136. Шишов О.В. Проектирование аналого-цифровых контрольно-управляющих микропроцессорных систем / О.В. Шишов. – Саранск, 2001. – 116 с.
137. Иванова В.М. Математическая статистика: Учебник для техникумов / В.М. Иванова В.Н. Калинина, Л.А. Нетушилова, И.О. Решетникова / Под ред. А.М. Длина. – М.: Высш. школа, 1975. – с. 114-117.
138. Вентцель Е.С. Теория вероятностей: Учебник для вузов / Е.С. Вентцель. –М.: Высш. шк., 1998. – с. 84.
139. Дроздов Н.В. Системы автоматического управления с микроЭВМ / Н.В. Дроздов, И.В. Мирошник, И.В. Скорубский.– Л.: Машиностроение, 1989. – 284 с.
140. Строганов Р.П. Управляющие машины и их применение / Р.П. Строганов. – М.: Высш. школа, 1978. – 264 с.
141. Парр Э. Программируемые контроллеры. Руководство для инженера / Э. Парр. – М.: Бином. Лаборатория знаний, 2007. – С. 180-185.
142. Петров И.В. Отладка прикладных ПЛК программ в CoDeSys(часть 9) / И.В. Петров, В. Долл // Промышленные АСУ и контроллеры. – 2007. – № 6.
143. Макконнелл С. Профессиональная разработка программного обеспечения. Пер. с англ. / С. Макконнелл. – СПб.: Символ-Плюс, 2006. – 240 с.
144. Аралбаев Т.З. Теоретические и прикладные аспекты построения адаптивных мажоритарных устройств распознавания образов / Т.З. Аралбаев // Вестник ОГУ, № 5. – 2002. – С. 131-135.
145. Кутдусов Ф.Х. Адаптивный мажоритарный элемент в системах автоматического управления / Ф.Х. Кутдусов, Т.А. Рублёв // Электронный научный журнал «Исследовано в России». – 2005. – С. 1248-1252.
146. Леденёв Г.Я. Способ определения отказавшего датчика в избыточной измерительной системе / Г.Я. Леденёв. – Патент RU2382391, МПК G05И23/02.– 2010.
147. Сорокин А.А. Оценка показателей надёжности радиоэлектронных устройств и систем при проектировании. Интернет.
148. Нестеров А.Л. Проектирование АСУ ТП. Книга 1 / А.Л. Нестеров. – Изд-во ДЕАН, 2006. – 552 с.
149. Нестеров А.Л. Проектирование АСУ ТП. Книга 2: Методическое пособие / А.Л. Нестеров. –Изд-во ДЕАН, 2009. – 944 с.
Приложение А
Модули УСО
Система ввода-вывода сигналов с УСО контроллера обеспечивает ввод-вывод сигналов следующих типов:
1) входные аналоговые сигналы;
2) выходные аналоговые сигналы;
3) входные дискретные сигналы;
4) выходные дискретные/импульсные сигналы;
5) входные число-импульсные сигналы.
Тип УСО двух контроллеров, установленных на стенде в лаборатории автоматизации ВПИ[26], равен 15. Это означает, что в группе А установлен модуль аналоговых сигналов МАС (УСО тип 1), а в группе Б – модуль дискретных сигналов МСД (УСО тип 5). Поэтому тип УСО равен 15 или, говоря проще, тип УСО15. Следует отметить, что в состав модуля МАС входят аналого-цифровой (АЦП) и цифро-аналоговый (ЦАП) преобразователи, поэтому и назвали этот модуль МАС, а не АЦП или ЦАП. В состав модуля МСД также входят два преобразователя: дискретно-цифровой (ДЦП) и цифро-дискретный (ЦДП). С принципом работы АЦП и ЦАП можно познакомиться в [133, 135, 137].
Внешнее расположение разъёмов на контроллере приведено на рис. 59.
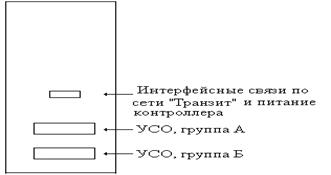
Рис. 59. Внешние связи контроллера Р-130 (вид сзади)
Две платы УСО связаны кабелем с двумя разъёмами, расположенными на задней стороне контроллера. Эти разъёмы называются: группа А (Гр.А) и группа Б (Гр.Б). Сигналы подают не на сами разъёмы, а через клеммно-блочные соединители (КБС). Каждое из этих гнезд связано со «своим» разъемом, расположенным на задней панели блока, причем эти разъемы также обозначаются «Группа А» и «Группа Б». Цепи группы А подключаются к разъему «Гр.А», цепи группы Б – к нижнему разъему «Гр.Б», если смотреть на контроллер с задней стороны. Для подключения аналоговых сигналов, в нашем случае к «Гр.А», следует использовать КБС-3, а для подключения дискретных сигналов – КБС-2. На стенде аналоговые и дискретные сигналы подключены к модулям УСО напрямую, то есть без КБС. На шасси БК размещается модуль стабилизатора напряжения МСН и узел лицевой панели.
Схема внешних соединений для групп А и Б однозначно определяется типом модуля УСО, связанного с разъемом соответствующей группы. В контроллере Р-130 имеется семь типов модулей УСО. Эти модули определяют семь типов входов-выходов, отличающихся типом сигналов и сочетанием входов и выходов. Модули УСО и вид лицевой панели определяют модификацию блока БК. Оба разъема УСО имеют тип РП15-23 на 23 контакта, из которых используется только 21. Оба разъёма расположены на задней части корпуса контроллера. Двухзначный код модификации контроллера образуется путем соединения двух однозначных номеров, характеризующих тип входа-выхода для групп А и Б, при этом старшая цифра кода модификации равна типу входа-выхода группы А, а младшая цифра – группы Б. Например, модификация 15 означает, что в первом слоте размещена плата (модуль) МАС. К разъему УСО группы А подключают аналоговые сигналы (8 аналоговых входов и 2 аналоговых выхода). Во втором слоте размещен модуль дискретных сигналов МСД, то есть к разъему группы Б должны подключаться дискретные сигналы (8 дискретных входов и 8 дискретных выходов). На рис. 60 представлена фотография двух устройств локальной сети «Транзит»: блок сопряжения с ПЭВМ (шлюз) и контроллер Р-130.

Рис. 60. Вид сзади на шлюз и контроллер
Система ввода-вывода сигналов с УСО контроллера обеспечивает ввод-вывод аналоговых и дискретных сигналов со следующими характеристиками.
Таблица 22
Типы модулей УСО
| Код модуля (тип УСО) | Обозначение модуля | Число входов-выходов |
| – | Модуль отсутствует | |
| МАС | 8 аналоговых входов и 2 аналоговых выхода (8AI/2AO) | |
| МДА | 8 аналоговых входов и 4 дискретных выхода (8AI/4DO) | |
| МСД 0/16 | 16 дискретных выходов (16DO) | |
| МСД 4/12 | 4 дискретных входа и 12 дискретных выходов (4DI/12DO) | |
| МСД 8/8 | 8 дискретных входов и 8 дискретных выходов (8DI/8DO) | |
| МСД 12/4 | 12 дискретных входов и 4 дискретных выхода (12DI/4DO) | |
| МСД 16/0 | 16 дискретных входов (16DI) |
Входные аналоговые сигналы
Перечислим унифицированные сигналы тока и напряжения, которые поступают на КБС-3:
– 0-5 мA, нормирующее сопротивление в КБС-3 устанавливается равным 400 Ом (Rвх = 400 Ом);
– 0-20 мA, Rвх = 100 Ом;
– 4-20 мA, Rвх = 100 Ом;
– 0-10 В, Rвх = 27 кОм.
Такие сопротивления в КБС-3 устанавливаются перемычками, расположенными на задней стенке КБС. Таким образом, независимо от диапазона токового сигнала, на вход АЦП модуля МАС всегда приходит напряжение от нуля до двух вольт.
Сигналы термопар типа ХА, ХК, ПП, ПР, ВР по ГОСТ 3044-7884.
Сигналы термосопротивлений типа ТСП, ТСМ по ГОСТ 6651-7884.
Разрешающая способность АЦП – 0,025 % (12 разрядов).
Максимальная погрешность АЦП после калибровки – 0,3 %[27].
Погрешность АЦП при изменении температуры окружающей среды на 10 °С составляет: максимальное значение – 0,4 %; среднее значение – 0,2 %.
Максимальная погрешность АЦП при изменении напряжения питания на  составляет 0,1 %.
составляет 0,1 %.
|
|
|

Историки об Елизавете Петровне: Елизавета попала между двумя встречными культурными течениями, воспитывалась среди новых европейских веяний и преданий...

Индивидуальные очистные сооружения: К классу индивидуальных очистных сооружений относят сооружения, пропускная способность которых...

Биохимия спиртового брожения: Основу технологии получения пива составляет спиртовое брожение, - при котором сахар превращается...

Наброски и зарисовки растений, плодов, цветов: Освоить конструктивное построение структуры дерева через зарисовки отдельных деревьев, группы деревьев...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!