Таблица 24
| Вид сигнала
или параметра
| Размерность
| Диапазон
изменения
| Минимальный шаг
|
| изменения
| установки
|
| Аналоговый
Временной
Числовой
Дискретный
Масштабный коэффициент
Коэффициент пропорциональности
Скорость изменения
Длительность
импульса
Технические единицы
| %
c, мин, ч
–
–
–
–
%/с, %/мин
%/ч
с
| –199,9...199,9
0 –819,0 и ¥
–8 191...8 191
0 или 1
–15,99...15,99
–127,9...127,9
0...199,9 и ¥
0,12...3,84
–1 999...8191
| 0,012
0,05
–
0,001
0,008
0,012
0,12
| 0,024
0,1
–
0,002
0,016
0,024
0,12
|
При автоподстройке минимальной длительности импульса в алгоритмах импульсного вывода значение Тмин, достигнув 3,84 с, ограничивается на этом значении (рис. 64). Снизу значение Тмин всегда ограничено величиной 0,12 с.

Рис. 64. Автоподстройка длительности импульса – зависимость минимальной длительности импульса от аналогового сигнала
Приложение В
Типы сигналов и их соответствие
При конфигурировании допускается соединять входы и выходы алгоблоков с разнотипными сигналами. При этом следует учитывать взаимное соответствие диапазона изменения различных типов сигналов.
Таблица 25
Взаимное соответствие типов сигналов
| Тип сигнала на входе алгоблока
(приемник)
| Тип сигнала на выходе алгоблока (источник)
|
| Аналоговый Х, %
| Временной Т,
с; мин; ч
| Числовой, N
| Дискретный, С
|
| Аналоговый Х, %
| Х = Х
| Х = Т/4,096
| Х = N/40,96
| Х = –100 при С = 0
Х = 100 при С = 1
|
| Временной Т,
с; мин; ч
| Т = 4,096Х при
0 < Х < 199,9;
Т = 0 при Х < 0;
Т = ¥ при Х = 199,9
| Т = Т
| Т = 0,1N при
0 < N < 8191;
Т = 0 при N < 0
Т = ¥
при N = 8191
| Т = 0 при С = 0
Т = 409,6 при С = 1
|
| Числовой[28] N
| N = 40,96Х
| N = 10Т
| N = N
| N = –4 096 при С = 0
N = 4 096 при С = 1
|
| Дискретный С
| С = 1 при Х > 0;
C = 0 при Х < 0
| С = 1
при любом Т
| С = 1 при N > 0;
C = 0 при N < 0
| C = C
|
| Масштабный
коэффициент Км
| Км = Х/12,5
| Км = Т/51,2
| Км = N/512
| Км = –8 при С = 0
Км = 8 при С = 1
|
| Коэффициент
пропорциональности Кп
| Кп = 0,64Х
| Кп = Т/6,4
| Кп = N/64
| Кп = –64 при С = 0
Кп = 64 при С = 1
|
| Скорость
изменения V,
%/с; %/мин; %/ч
| V = Х при
0 < Х <1 99,9
V = 0 при Х < 0
V = ¥ при Х = 199,9
| V = Т/4,096
| V = N/4096 при
0 < N < 8191
V = 0 при N < 0
V = ¥
при N = 8 191
| V = 0 при С = 0
V = 100 при С = 1
|
| Длительность
импульса Тимп, с
| Тимп =
0,12(40,96Х + 1) при 0 < Х < 0,757
| Тимп = 0,12(10Т + 1)
при 0 < Т < 3,1
| Тимп =
0,12(N + 1)
при 0 < N < 31
| –
|
Примечание.
1. Числовые сигналы принимают только целые значения. Например, такой тип сигнала мы имеем на первом выходе алгоритма счётчик (СЧТ).
2. При автоподстройке длительности импульса значение Тимп ограничивается снизу величиной 0,12 с и сверху величиной 3,84 с.
3. Если вход сумматора связан с выходом логического блока, то при изменении логического сигнала с нуля на единицу, на входе сумматора сигнал будет принимать значения с ‑100 на 100.
Приведём примеры
Если на первый вход алгоритма ОКО подать логический сигнал, то при изменении состояния логического сигнала с нуля на единицу на первом входе алгоритма ОКО значение будет изменяться с ‑100 на 100. Допустим, что требуется осуществлять автоподстройку коэффициента пропорциональности Кп в регуляторе. Аналоговый сигнал, соответствующий определённым значениям Кп, подаётся на вход регулятора, например, с алгоритма КУС. Чтобы установить значение Кп равным двум, следует сформировать в алгоритме КУС значение 3,125. Тогда это значение умножится на 0,64 и примет значение два, которое должен принять Кп.
Мне приятно, что в каждой группе находятся творческие студенты с русским духом[29]. Так например, временной сигнал, чтобы видеть на нижнем цифровом индикаторе в регулирующей модели контроллера Р-130, следует выдавать (конфигурировать) на вход Z алгоритма ОКО. Устанавливая на входе Nz признак 1, если младший масштаб времени (наблюдаем время в секундах). Находится студент, который хочет видеть время на верхнем цифровом индикаторе. И соображает, что прежде чем подать этот сигнал на первый вход алгоритма ОКО его надо умножить на 4.096. Но точно умножить на этот коэффициент не получится, так как каждый тип сигнала имеет уровень дискретизации (см. таблицу 26). Поэтому значение времени наблюдаем с небольшой погрешностью, приемлемой для лабораторных работ.
Приложение Г
Справочная информация по алгоритмам
Описание алгоритмов приведено в Редиторе и в литературе [13, 25].
Принятые сокращения
Приведём расшифровку входных сигналов, принятую в документации на контроллер Р-130 и контроллер серии «Контраст» (КР-300).
Буквой С обозначают команды: Сп – пуск; Сст – стоп; Ссбр – сброс; Сзпс – записать; Сотк – отключить; Спер – переключить; Сотс – признак отсчёта. Команда Ссбр приоритетна перед командой Сст, то есть если одновременно поступят на вход алгоритма, например ТМР, команда Сст и команда Ссбр, то команда Ссбр будет приоритетна. Среж – переключить режим; Сб – вход счётчика больше, то есть при поступлении на этот вход серии импульсов, счётчик начнёт счёт в сторону увеличения относительно начального значения No; См – вход счётчика меньше, то есть при поступлении на этот вход серии импульсов, счётчик начнёт счёт в сторону уменьшения относительно начального значения No; Ссл – команда слежения; Сзап – команда запоминания; Ссб – в алгоритме ЗДН признак статической балансировки[30]; Сдб – признак динамической балансировки.
V – скорость; Vб – скорость балансировки (%/с).
Х – аналоговые сигналы; Хб,i и Xм,I – пороговые значения: верхнее (большая граница, отсюда, видимо, индекс б) и нижнее (меньшая граница) соответственно; ХD – величина гистерезиса; Хздн, Хвх, Хe, Хвых – аналоговые сигналы.
D – дискретные сигналы.
К – коэффициенты; Кп – коэффициент пропорциональности; Кд – коэффициент дифференцирования.
Ти – время интегрирования; Т – временной тип сигнала.
N – целые значения; Z – любой тип сигнала, а Nz – признак, который уточняет, тип сигнала поданного на вход Z алгоритма ОКО или ОКЛ; Nэ – номер этапа в алгоритме ЭТП; Nист – номер источника (логический номер контроллера локальной сети, с которого принимается информация). Такое обозначение встречается у алгоритма ВИН, так что обратите внимание, когда будете его применять; Ni – i-й номер канала.
Хнач – начальное значение; Хпор – пороговое значение (в интеграторе при превышении порогового значения на дискретном выходе формируется импульс длительностью равной времени цикла контроллера).
Выходные сигналы
У – аналоговые сигналы; Уср – среднее значение.
D – дискретные сигналы Dв; Dн – признаки выхода входной величиной за верхнюю или нижнюю границу; Dотс – признак отсчёта.
Т – временной тип сигнала.
N – целые значения (тип числовой).
Обозначение логических операций
Операция И: &, И, and, *, Ù, Ç. Операция ИЛИ: OR, ИЛИ, 1, +, Ú, È. Исключающее ИЛИ, или сложение по модулю два: Å, +. Импликация: ®. Эквивалентность: ~. Стрелка Пирса (отрицание дизъюнкции): ¯. Штрих Шеффера (отрицание конъюнкции): \, ½. Запрет по Х (отрицание импликации): YDX. Запрет по Y (отрицание импликации): XDY.
не cледует забывать, что в контроллере Р-130 ОЗУ разделено на два ОЗУ (две микросхемы). На практике наблюдались ситуации: количество занятых программой алгоблоков не превышает 99, например, 80. Казалось бы, ещё можно продолжать программировать, но ресурс одного из ОЗУ исчерпан, поэтому программу увеличить нельзя. В таком случае следует пересмотреть алгоритм работы программы и попытаться исключить из программы алгоритмы, которые занимают много памяти. При правильном проектировании контроллера такой ситуации не должно быть. На рис. 65 представлена структура алгоритма ВАА. Сигналы с модуля МАС опрашиваются автоматически и никаких соединений с модулем устанавливать не надо.
ВАА (07 (8)) – Ввод сигналов аналоговый группы А (Б)

Рис. 65. Структура алгоритма ВАА
Алгоритмы ВАА и ВАБ предназначены для ввода информации с модуля МАС. Коэффициенты Хсм и Км служат для исключения систематической погрешности измерительного канала.
Приложение Д
Ряд Пада
При моделировании приходится применять разложение функции К(р) = e–pτ в быстросходящиеся ряды и ограничение сравнительно небольшим числом членов ряда [7, 15, 16, 111, 118]. Естественно, в первую очередь используют приближения с помощью дробно-рациональных функций, как наиболее универсальных. Разложение е -pτв дробный ряд Пада является известным примером такого подхода. В этом случае получим
 , (8)
, (8)
где
 ;
;
 .
.
Например, при μ = ν = 1 получим K(р) вида
 .
.
При μ = ν = 2 получим

 . (9)
. (9)
При μ = ν = 4 получим
 .
.
Сравнение выражений показывает, что разложение е–pτ в дробный ряд Пада соответствует приближению е–рτ с помощью дробно-рациональной функции вида (8) [7].
График (Рис. 66) отображает фазовые характеристики для различного числа членов ряда Пада в функции от величины ωt, являющейся важным показателем реального блока запаздывания.
Так, например, для приближения рядом Пада 2-го порядка ошибка в фазовой характеристике между идеальной φ(ω) = –ωt и приближенной составит
 .
.
Результат, полученный на данном графике, можно подтвердить экспериментально, подавая синусоидальный сигнал на вход звена запаздывания как идеального, так и полученного приближением к идеальному с использованием разложения в ряд Пада.

Рис. 66. Фазовые характеристики при разложении в ряд Пада
Наконец, можно осуществить приближение с помощью последовательного включения элементарных звеньев, обладающих детектирующими свойствами, например, с передаточной функцией вида
 .
.
При этом ошибка в фазовой характеристике составит при конечном числе ряда следующую величину:
 .
.
Приближение e–pτ с помощью функций передачи, отличных от минимально-фазового вида, принципиально возможно, однако приводит к медленно сходящимся рядам, и, следовательно, нельзя ограничиться малым числом членов разложения, что ухудшает возможность практической реализации подобных устройств. К подобным видам разложения относится ряд Тейлора:

или следующее выражение
 .
.
График (Рис. 66) показывает, насколько узок тот частотный спектр, в котором применимо приближение, использующее разложение в ряд Тейлора. С другой стороны, на этом графике показано также, что за счет несколько иного выбора коэффициентов разложения можно получить результат по точности как у приближения рядом Пада 4-го порядка, а порядок полученной функции будет равен 2, что, несомненно, дает более лучшие предпосылки к аппаратурной и программной реализации.
Структурная схема данной системы имеет следующий вид (Рис. 67):

Рис. 67
Представим ещё одну структуру системы регулирования объектом с запаздыванием [7, рис. 138]. В книге некоторые разделы написаны так хорошо и подробно, что хочется обратить внимание студентов, как автор анализирует, исследует, строит гипотезы и старается их проверить, делает выводы.
Первый этап построения системы с предварением (упреждением) состоит в синтезе передаточной функции упредителя Wу(р). А идея очень проста: хотелось бы получить систему без чистого запаздывания. На основании теории автоматического управления линейный упредитель может быть включен параллельно объекту управления (в данном случае – параллельно модели ОУ).
Определим структуру передаточной функции упредителя Wy(p) с целью исключения влияния чистого запаздывания. Для выполнения этого условия должно выполняться следующее соотношение:
 .
.
Из структурной схемы, приведённой на рис. 67, имеем
X(p) = U(p)W1(p)e–pτ + U(p)Wy(p)
или
U(p)W1(p) = U(p)W1(p)e–pτ + U(p)Wy(p).
Отсюда найдём передаточную функцию упредителя Wy(p):
Wy(p) = W1(p)(1 – e–pτ).
В результате получим схему, изображённую на рис. 68. Проведём небольшой анализ упредителя.

Рис. 68. Структурная схема ОУ и упредителя

Рис. 69. САР с упредителем

Рис. 70. Более надёжная структура САР с упредителем
Для повышения надёжности работы упредителя введём в структуру два коэффициента К1 и К2, причём К1 > К2. Например, К1 = 2, а К2 = 1.
Расчет параметров настройки регулятора производится без учета звена чистого запаздывания.
Передаточную функцию звена чистого запаздывания представим в виде ряда Пада 2-го порядка:
 . (10)
. (10)
Передаточная функция регулятора с учетом найденных параметров
 .
.
Передаточная функция замкнутой системы без упредителя
 .
.
Передаточная функция замкнутой системы c упредителем
 .
.
Характер разницы между этими двумя системами можно оценить по графику на рис. 71. Из данного графика видно, что переходный процесс в системе с упредителем (предикатором) имеет намного лучшее качество регулирования.

Рис. 71. Графики переходных процессов:
1 – без упредителя; 2 – с упредителем
Реализация упредителя Смита
Для удобства восприятия и наблюдения на контроллере Р-130 реализована система автоматического управления с упредителем Смита только для объекта 2-го порядка, как наиболее часто встречающегося в промышленности. В Mathcad исследованы также системы автоматического управления объектами 1-го и 3-го порядков. В качестве объекта управления возьмём передаточную функцию вида
 ,
,
где T2 и Т1 – постоянные времени объекта; k – коэффициент передачи.
В дифференциальной форме уравнение объекта управления будет иметь следующий вид:
 .
.
Запишем данное уравнение в следующей форме (старшую производную переносим в левую часть уравнения):
 . (11)
. (11)
Методика перехода от дифференциальных уравнений к интегральным подробно изложена в литературе по аналоговым машинам [126, 127, 128-132]. Выражение (11) реализуется на Р-130 с помощью 2-х интеграторов и сумматора с масштабируемыми входами (Рис. 72).
Для наглядности ниже представлена программа, реализующая данный объект на Р-130 (Рис. 73). В программе, реализующей модель объекта, не учитывается время цикла контроллера.
Кривая разгона данного объекта управления без запаздывания представлена на Рис. 74. Следует отметить, что значения, соответствующие данной кривой разгона, не совпадали со значениями, которые выводились на лицевую панель при моделировании этого объекта на Р-130. Хотя первые 10 секунд наблюдения эти значения были сопоставимы, а затем разница между ними стала ощутимой. Для выявления причины этих расхождений необходимо проводить исследования (например, оценить влияние цикла контроллера).

Рис. 72. Схема моделирования дифференциального уравнения
В качестве модели ОУ можно использовать, например, звено второго порядка следующего вида:
 .
.
Переключатель служит для формирования ступенчатого воздействия на ОУ. В программе (Рис. 73) не содержится звено запаздывания.
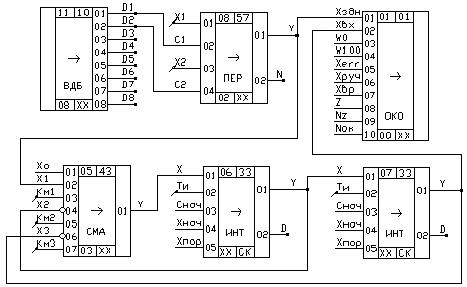
Рис. 73. Программная реализация звена второго порядка
Переходная характеристика представлена на рис. 74.

Рис. 74
В контроллере Р-130 звено запаздывания можно реализовать двумя способами: во-первых, используя алгоритм ЗАП (39), Рис. 75; во-вторых, используя разложение в ряд Пада (в данном случае 2-го порядка), формула (9).

Рис. 75
Одной из проблем, возникающих при реализации программы (Рис. 75), является трудность расчета количества алгоблоков и значения модификатора исходя из цикла котроллера. Например, объект имеет западывание 10 секунд (цикл контроллера 0,2 секунды). Как видно из структуры алгоблока (Рис. 76), один алгоблок ЗАП (39) с модификатором m = 12 может задержать сигнал на 12 · 0,2 = 2,4 секунды, следовательно для задержки сигнала на 10 секунд необходимо использовать 4 алгоблока ЗАП (39) с модификатором m = 12 и один алгоблок ЗАП (39) с модификатором m = 2. На взгляд автора, это не очень удобно. Допустим, через некоторое время после реализции вышеуказанной схемы по каким-либо причинам пришлось изменить цикл контроллера. Следовательно, рассчитанное запаздывание не будет соответствовать реальному, и для их приведения в соответствие необходимо будет вносить изменения в существующую программу.

Рис. 76
Используя полученное выражение для разложения в ряд Пада 2-го порядка можно записать в дифференциальной форме:
 ,
,
где t – время запаздывания.
Запишем данное выражение в следующем виде:
 .
.
Данное выражение аналогично вышеприведенной схеме (Рис. 72) и реализуется с использованием сумматоров с масштабируемыми входами и интеграторов.
Выводы
В ходе выполнения данной работы были получены результаты:
1) использование настройки регулятора без учета звена чистого запаздывания сопряжено с риском получить в итоге расходящийся переходный процесс и соответственно неустойчивую систему в замкнутом состоянии или получить колебательный переходный процесс;
2) применение разложения в ряд Тейлора в качестве приближения звена запаздывания нежелательно по причине медленной сходимости данного ряда, что не дает ограничиться малым числом членов ряда исходя из условий аппаратурной реализации;
3) реализация запаздывания с помощью алгоритма ЗАП (39) требует постоянного контроля времени цикла контроллера;
4) реализация запаздывания с использованием разложения в ряд Пада требует знания производных входного сигнала (то есть того, который поступает на вход звена запаздывания), что требует наличия, при реализации на практике, операций дифференцирования (что не всегда удается осуществить);
5) применение упредителя Смита в системах с объектом, имеющим запаздывание, уменьшает величину перерегулирования и длительность переходного процесса, то есть повышает качество переходного процесса.
ПРИЛОЖЕНИЕ Ж






