Рассматривается система автоматического регулирования (САР) соотношения реагентов, реализуемая на базе микропроцессорной техники (контроллеров). Основное внимание в данной работе уделено алгоритмической части регулирования соотношения. В алгоритме учитываются ситуации, которые могут появляться в условиях промышленной эксплуатации САР. Надёжность САР обеспечивается за счёт повышения точности поддержания заданного соотношения, исключения отклонения текущего значения соотношения на величину больше допустимого значения и исключения ложного формирования управляющего воздействия. Данный алгоритм является типовым [29, 30] и может применяться в технологических процессах, где требуется поддержание соотношения.
На рис. 33 изображён реактор, в который поступают два раствора реагента.

Рис. 33. Функциональная схема регулирования соотношения
Приведём пояснения обозначений на рисунке: Р – реактор; F1 – расход первого раствора реагента; c1 – концентрация первого реагента; F2 – расход второго раствора реагента; c2 – концентрация второго реагента; F3 – выход с реактора (расход продуктов реакции – первый поток); c1п – проскок первого реагента; F4 – выход с реактора (расход продуктов реакции – второй поток); c2п – проскок второго реагента; с3 – концентрация целевого продукта; jзад – заданное значение соотношения; М1 – коэффициент перевода весового соотношения в эквимолярное; c1пmin – нижняя допустимая граница проскока первого реагента; c1пmax – верхняя допустимая граница проскока первого реагента; c2пmin – нижняя допустимая граница проскока второго реагента; c2пmax – верхняя допустимая граница проскока второго реагента. Указываются также нижняя и верхняя границы задания по соотношению растворов реагентов:  – нижняя граница заданного значения соотношения;
– нижняя граница заданного значения соотношения;  – верхняя граница заданного значения соотношения. ИМ I – первый исполнительный механизм (изменяет расход F1); ИМ II – второй исполнительный механизм (изменяет расход F2); FE – датчик расхода; QE – датчик концентрации; TE – датчик температуры в зоне реакции; PRF – признак ведущего канала. Если автоматически или оператором задаётся значение признака PRF равным единице, то ведущим каналом является первый, то есть расход реагента – F1. В этом случае расход F1 стабилизируется, а соотношение поддерживается изменением расхода F2. Если PRF = 0, то ведущим каналом является F2. АВТ – автоматический режим работы системы регулирования соотношения; ДИСТ – дистанционный режим работы системы; РУЧ – ручной режим работы системы, то есть всё управление берёт на себя оператор. На рис. 33 опущены многочисленные приборы, не влияющие на суть алгоритма регулирования соотношения. Например, преобразователи.
– верхняя граница заданного значения соотношения. ИМ I – первый исполнительный механизм (изменяет расход F1); ИМ II – второй исполнительный механизм (изменяет расход F2); FE – датчик расхода; QE – датчик концентрации; TE – датчик температуры в зоне реакции; PRF – признак ведущего канала. Если автоматически или оператором задаётся значение признака PRF равным единице, то ведущим каналом является первый, то есть расход реагента – F1. В этом случае расход F1 стабилизируется, а соотношение поддерживается изменением расхода F2. Если PRF = 0, то ведущим каналом является F2. АВТ – автоматический режим работы системы регулирования соотношения; ДИСТ – дистанционный режим работы системы; РУЧ – ручной режим работы системы, то есть всё управление берёт на себя оператор. На рис. 33 опущены многочисленные приборы, не влияющие на суть алгоритма регулирования соотношения. Например, преобразователи.
Допустим, что F1 – ведущий поток. Расход реагента F1 определяет нагрузку на реактор и не изменяется. С точки зрения регулирования данный расход стабилизируется. В этом случае расход F2 будет ведомым, то есть изменением этого расхода будем поддерживать заданное соотношение.
Рассмотрим несколько вариантов регулирования соотношения. Самый простой, на первый взгляд, алгоритм регулирования соотношения представлен зависимостью (1). Получим весовое соотношение реагентов
 . (1)
. (1)
Для поддержания эквимолярного соотношения введём коэффициент перехода М1 от весового соотношения к молярному. Коэффициент М1 учитывает молекулярные веса реагентов и стехиометрию уравнения реакции.
Уравнение (1) примет вид:
 . (2)
. (2)
Приравняем данное текущее соотношение заданному соотношению.
Из формулы (2) следует, что поддержание заданного соотношения можно осуществлять изменением расхода F2 по формуле (3):
 . (3)
. (3)
Закон регулирования по формуле (3) является статическим; для него неизбежна статическая ошибка. Допустим, в выражении (3) значения параметров в числителе и знаменателе остались неизменными, поэтому и положение исполнительного механизма ИМ II остаётся неизменным. Если в это время изменяется давление в трубопроводе II, то изменится и расход F2i, следовательно, нарушится заданное соотношение, а изменить положение по данному алгоритму (формула (3)) не представляется возможным. Для повышения качества (точности) поддержания заданного соотношения перейдём к астатическому закону регулирования. В качестве астатического регулятора возьмём ПИ-регулятор. Выражение (4) отражает суть астатического регулирования соотношения с помощью ПИ-регулятора:
 , (4)
, (4)
где DUF2 – сигнал регулирования расхода F2; К1п – коэффициент пропорциональности; Т1и – постоянная времени интегрирования; UF20 – начальное значение сигнала регулирования, соответствующее начальному положению ИМ II; e j – величина рассогласования соотношения; Кп e j – пропорциональная составляющая;  – Интегральная составляющая регулятора.
– Интегральная составляющая регулятора.
e j = j i – j зад, (5)
где e j – разность между текущим значением соотношения j i и заданным j зад.
В виду того, что канал F1 является ведущим, система регулирования должна поддерживать расход F1 неизменным. Для стабилизации расхода F1 применяется также ПИ-регулятор, но с другими коэффициентами настройки:
 , (6)
, (6)
где e1 = F1зад – F1i; DUF1 – сигнал регулирования расхода F1; К2п – коэффициент пропорциональности; Т2и – постоянная времени интегрирования; UF10 – начальное значение сигнала регулирования, соответствует начальному положению ИМ I.
Автоматически или по требованию оператора может меняться признак ведущего канала. Если признак PRF примет значение ноль, то канал F2 станет ведущим, а канал F1 станет ведомым. В момент переключения каналов текущее значение расхода F2 становится равным заданному. ПИ-регулятор по каналу F2 перейдёт в режим стабилизации расхода F2. Заданное соотношение будут поддерживаться изменением расхода F1:
 , (7)
, (7)
где настройки данного регулятора численно могут быть другими, поэтому коэффициент пропорциональности К3п и время интегрирования Т3и имеют другое обозначение. Величина рассогласования определяется следующим образом:
e j = j зад – j i.
Для того чтобы все переключения происходят безударно, предлагается следующий алгоритм действий системы в разных ситуациях. Рассмотрим ситуацию, когда PRF = 1. В этом случае канал F1 (расход F1) является ведущим. Расход F1 стабилизируется. А соотношение поддерживается изменением расхода F2. В этот момент регулятор стабилизации F2 отключен. Поэтому F2зад = F2i, то есть задание отслеживает текущее значение расхода. Регулятор по соотношению расходом F1 тоже отключен, поэтому j зад = j i, то есть задание отслеживает текущее значение соотношения.
На рис. 34 приведена упрощенная структура алгоритма управления соотношением (один из вариантов). Тут показана суть, а не подробная реализация.
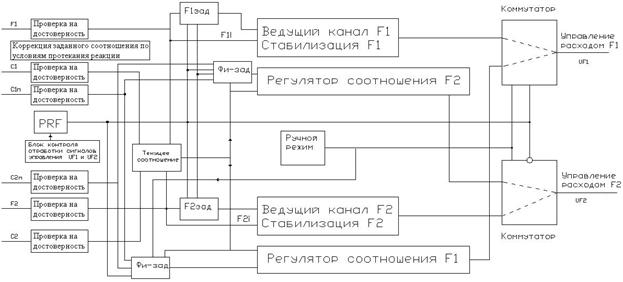
Рис. 34. Структура регулятора соотношения
Следует отметить, что вся входная информация проверяется на достоверность. Текущие значения параметров с датчиков расхода и концентрации проверяются на обрыв, выброс или провал. Значения, не отражающие реальные значения технологического процесса, должны распознаваться и не поступать в систему регулирования. Системой игнорируется также ошибочный ввод оператором неверного задания. Неверным заданием считается задание, выходящее за допустимые границы.
При регулировании соотношения постоянно контролируют концентрации исходных продуктов на выходе реактора. Эти концентрации называют проскоками, и их значения при нормальном течении процесса должны находиться в заданных пределах. Допустим, расход F1 является ведущим, а расход F2 – ведомым. Проскок по первому реагенту С1п превысил допустимую верхнюю границу  , то есть
, то есть  , где s1 – погрешность измерительного канала С1п. Допустим, что температура в реакторе не изменялась; в этом случае корректировка j зад осуществляется в сторону уменьшения (формулы (2), (4), (5)). Величина корректировки зависит от уравнения реакции, анализа статистических данных и опыта технолога. Запаздывание объекта управления по измерительным каналам определяет периодичность коррекции задания.
, где s1 – погрешность измерительного канала С1п. Допустим, что температура в реакторе не изменялась; в этом случае корректировка j зад осуществляется в сторону уменьшения (формулы (2), (4), (5)). Величина корректировки зависит от уравнения реакции, анализа статистических данных и опыта технолога. Запаздывание объекта управления по измерительным каналам определяет периодичность коррекции задания.
Для повышения точности и надёжности регулирования контролируется не только достоверность значений параметров, но и корректность ввода задания по соотношению. Кроме того, проверяется отработка сигналов регулирования исполнительными механизмами. При этом учитываются запаздывания по каналам регулирования, чтобы изменение расходов реагентов происходило перед реактором синхронно (одновременно), не нарушая соотношения реагентов. Такая синхронность исключает дополнительные возмущения в течение реакции.
Предложенный алгоритм был апробирован при регулировании соотношения растворов реагентов при приготовлении катализатора для процесса полимеризации и при регулировании соотношения изобутан-изобутиленовой фракции и формалина перед реактором синтеза диметилдиоксана на Волжском заводе синтетического каучука [10, 28, 29, 32, 35]. Сохраняя функции, регулятор соотношения можно реализовать по-другому. Для обеспечения заданной технологами точности поддержания соотношения следует уделять внимание не только алгоритмической и программной части, но и учитывать возможности аппаратной части. На этот момент, в частности, обращает внимание и Э. Парр [142].
Регулятор с автоподстройкой
Если у ОУ на разных нагрузках меняется коэффициент усиления, то должен изменяться и коэффициент усиления регулятора. Под коэффициентом усиления регулятора будем понимать пока только коэффициент пропорциональности Кп. Измененять Кп будем в соответствии с уравнением устойчивости:
|Wрег(p)| · |Wоу(p)| = 1,
где |Wрег(p)| – модуль коэффициента усиления регулятора; |Wоу(p)| – коэффициент передачи ОУ.
В качестве примера на Рис. 35 показана программа с автоподстройкой коэффициента пропорциональности регулятора. Коэффициент пропорциональности Kп растет при увеличении рассогласования в соответствии с зависимостью, представленной на рис. 36. Требуемая функция автоподстройки реализуется с помощью алгоритма кусочно-линейного преобразования КУС. Автоподстройка настроек регулятора, в данном случае только Кп, может производиться не только в зависимости от величины рассогласования, но и от нагрузки. Например, от значения другого параметра (рис. 37).
Особенностью используемой программы (PIAVTOP1.REM) является то, что в ней вход 6 алгоритма РАН соединен с выходом алгоритма КУС, имеющим тип «аналоговый сигнал». В связи с этим, при установке констант на аналоговых входах 03; 05; 07; 09, 11, 13 алгоритма КУС, задающих ординату в точках излома характеристики, необходимо учитывать связь между коэффициентом пропорциональности Kп и аналоговым сигналом X, а именно: Kп = 0,64X [20, 25].
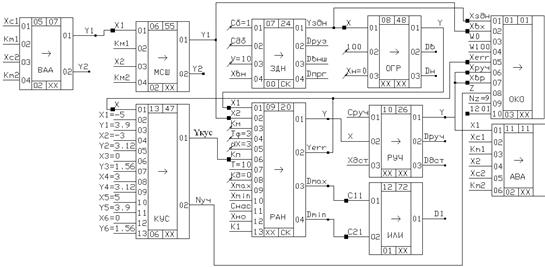
Рис. 35. Регулятор с автоподстройкой коэффициента пропорциональности

Рис. 36. График изменения Кп
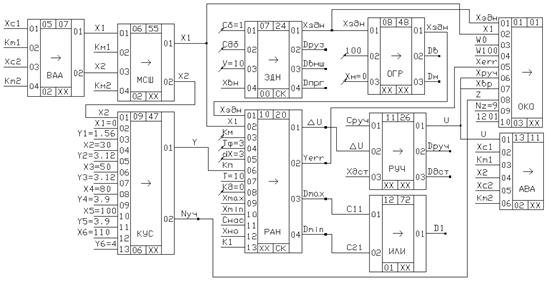
Рис. 37. Программа регулятора с автоподстройкой коэффициента пропорциональности

Рис. 38. График изменения Кп
Программа PIAVTOP2.REM с настройками представлена на рис. 39, поэтому распечатана без конфигурационной таблицы. Кп изменяется в зависимости от значения сигнала Х2, поступающего по второму каналу (рис. 40). Сигнал Х2 является развёрткой для алгоритма КУС.

Рис. 39. Каскадный аналоговый регулятор

Рис. 40. Пружинный мембранный исполнительный механизм типа ВО
Каскадный регулятор
Каскадный регулятор (PICASKAD.REM) состоит из ведущего и ведомого регуляторов. Их еще называют первичный и вторичный регуляторы [35 с. 297-223]. В аналоговом каскадном регуляторе ведущий и ведомый регулятор строится на базе алгоритма РАН (рис. 39).
Все правила, относящиеся к построению стандартных регуляторов, справедливы также для каскадных регуляторов. Отличие заключается в том, что в алгоритме ОКО задаётся другой модификатор. В частности, для каскадного регулятора модификатор равен 11. Кроме того, в алгоритме ОКО задействованы входы 12-15. Назначение входов «здн, л», «вх, л», «e, л» такое же, как, соответственно, входов «здн», «вх», «e» с той разницей, что сигналы, поданные на вторую группу входов, выводятся на цифровые индикаторы лицевой панели в каскадном режиме работы, а сигналы, поступающие на первую группу входов, – в локальном режиме. При переходе в локальный режим ведущий регулятор безударно отключается, а задание ведомому регулятору устанавливается вручную с помощью алгоритма ЗДЛ. Возврат в каскадный режим выполняется также безударно. Для того чтобы указанные переключения могли выполняться, вход «здл» алгоритма ОКО должен быть непосредственно (без промежуточных алгоблоков) подключен к первому выходу алгоритма ЗДЛ.Между алгоритмами ЗДН, РАН, ЗДЛ, РУЧ при необходимости могут включаться другие алгоритмы (суммирования, умножения-деления, ограничения и т. д.).
В каскадном регуляторе также задаются технические единицы (значения параметров в физических единицах, а не в процентах), в которых контролируются сигналы, причём эти единицы могут быть разными для ведущего и ведомого регулятора. В первом случае это могут быть, например, градусы Цельсия, во втором – давление в атмосферах.
12. Регулятор обратного действия [22]
Объект регулирования может иметь прямую или обратную характеристику. Поясним. Для прямой характеристики сигнал управления увеличивается. увеличивается и регулируемая величина. Если взять пневматический исполнительный механизм (ИМ), то он должен быть ВО (воздух открывает). В исходном состоянии ИМ закрыт (НЗ).
Исполнительный механизм, представленный на рис. 40, рассчитан на управление объектом, имеющим прямую характеристику: увеличивается сигнал управления, и клапан или задвижка открывается, расход увеличивается. Если исполнительный механизм имеет обратную характеристику, то при увеличении сигнала регулирования клапан прикрывается, расход уменьшается. Для реализации такого регулирования (обратного) два сигнала: сигнал задания и сигнал регулируемой переменной на входе алгоритма РАН инвертируются. На вход «ε» алгоритма ОКО сигнал поступает без инверсии (рис. 41). В нашем случае, когда сигнал управления равен нулю, задвижка открыта. При появлении сигнала регулирования ИМ прикрывается. В курсовой работе или КП в алгоритме ВАА необходимо оставить только два канала: первый и второй (резервный). Алгоритм ВДБ(PID_OBR.REM) – убрать. Он использовался в учебно-методических целях, для оперативного пояснения в лаборатории автоматизации действия статической и динамической балансировки. С помощью кнопок или тумблеров имитатора задают признаки статической и динамической балансировки, отключают регулятор – переходят в режим ручного управления (РУЧ).

Рис. 41. Структурная схема регулятора обратного действия
Необходимо подчеркнуть, что введённое здесь понятие регулятора прямого и обратного действия отличается от общепринятого [20, с. 115.] в теории автоматического регулирования. В общепринятом понимании в регуляторе прямого действия для перемещения затвора регулирующего органа используется энергия измерительного устройства. Посторонней энергии к регулятору не подводится. В регуляторах непрямого действия используется энергия, подводимая извне.
Формирование запрета
В системе регулирования могут возникнуть ситуации, требующие запрета действия регулятора в ту или другую сторону. Для этой цели в библиотеке имеются два алгоритма – запрет изменения ЗАИ и запрет знака ЗАЗ. Алгоритм ЗАИ применяется в составе аналогового регулятора, а алгоритм ЗАЗ – в составе импульсного регулятора.
Один из вариантов организации запрета(REGZAI.REM) показан на рис. 42.
первый нуль-орган алгоритма НОР срабатывает, когда входной сигнал X / 80 % или X £ 20 % (с точностью до гистерезиса, который в данном случае равен 1 %). Дискретные сигналы с выхода НОРа подаются на алгоритм ЗАИ.
Для аналогового регулятора в режиме запрета не только запрещается изменение сигнала на выходе алгоритма, формирующего запрет, но также блокируется изменение (в запрещенном направлении) сигнала в интегрирующей ячейке алгоритма РАН. На
Рис. 42 алгоритм запрета включен после алгоритма РУЧ. Если возникают условия запрета, то в этом случае запрет распространяется как на сигнал, поступающий от регулятора, так и на сигнал ручного управления. Если ручное управление не должно попадать под действие запрета, алгоритм ЗАИ (ЗАЗ) включается перед алгоритмом РУЧ. В этой программе, скорее всего, не следует ограничивать сигнал регулирования, иначе как же вернуть регулируемый параметр в норму?

Рис. 42. Регулятор с запретом регулирования вне заданного интервала
12.2. Конфигурационная таблица
Имя программы: RegZAI.rem
Дата создания отчета: 4/10/2012.
СИСТЕМНЫЕ ПАРАМЕТРЫ:
Системный номер контроллера: 2.
Модель контроллера: Регулирующая.
Комплектность УСО группы А: 8 ан. вх. и 2 ан. вых. (1).
Комплектность УСО группы Б: 8 д. вх. и 8 д. вых. (5).
Временной диапазон контроллера: Младший (Сек/Мин).
Время цикла: 0,2 сек.
АЛГОРИТМЫ И КОНФИГУРАЦИЯ:
Таблица 15
| Ал. б.
| Алгоритм
| Мод
| МВ
| Вход
| Значение
| Источник
|
| | | | | N Имя
| | Ал. б. /Выход
|
|
| ОКО (01)
|
| –
|
|
|
|
|
|
|
|
| 1 Xздн
|
| 7/1 (Yздн)
|
|
|
|
|
| 2 Xвх
|
| 6/1 (Y1)
|
|
|
|
|
| 3 W0
|
|
|
|
|
|
|
| 4 W100
|
|
|
|
|
|
|
| 5 Xerr
|
| 9/2 (Yerr)
|
|
|
|
|
| 6 Xруч
|
| 10/1 (Y)
|
|
|
|
|
| 7 Xвр
|
| 10/1 (Y)
|
|
|
|
|
| 8 Z
|
|
|
|
|
|
|
| 9 Nz
|
|
|
|
|
|
|
| 10 Nок
|
| 12/1 (D1)
|
|
| ОКО(01)
|
| –
|
|
|
|
|
|
|
|
| 1 Xздн
|
|
|
|
|
|
|
| 2 Xвх
|
|
|
|
|
|
|
| 3 W0
|
|
|
|
|
|
|
| 4 W100
|
|
|
|
|
|
|
| 5 Xerr
|
|
|
|
|
|
|
| 6 Xруч
|
|
|
|
|
|
|
| 7 Xвр
|
|
|
|
|
|
|
| 8 Z
|
|
|
|
|
|
|
| 9 Nz
|
|
|
|
|
|
|
| 10 Nок
|
| 12/2 (D2)
|
|
| ВАА (07)
|
| –
|
|
|
|
|
|
|
|
| 1 Xc1
|
|
|
|
|
|
|
| 2 Km1
|
|
|
|
|
|
|
| 3 Xc2
|
|
|
|
|
|
|
| 4 Km2
|
|
|
|
| МСШ (55)
|
| –
|
|
|
|
|
|
|
|
| 1 X1
|
| 5/1 (Y1)
|
|
|
|
|
| 2 Kм1
|
|
|
|
|
|
|
| 3 X2
|
|
|
|
|
|
|
| 4 Kм2
|
|
|
|
| ЗДН (24)
|
| М
|
|
|
|
|
|
|
|
| 1 Сб = 1
|
|
|
|
|
|
|
| 2 Сдб
|
|
|
|
|
|
|
| 3 V = 10
|
|
|
|
|
|
|
| 4 Xвн
|
|
|
|
| ОГР(48)
| –
| –
|
|
|
|
|
|
|
|
| 1 X
|
| 7/1 (Yздн)
|
|
|
|
|
| 2 100
|
|
|
|
|
|
|
| 3 Xн = 0
|
|
|
|
| РАН (20)
| –
| М
|
|
|
|
|
|
|
|
| 1 X1
|
| 8/1 (Y)
|
|
|
|
|
| 2 X2
|
| 6/1 (Y1)
|
Окончание таблицы 15
|
|
|
|
| 3 Kм
|
|
|
|
|
|
|
| 4 Tф = 3
|
|
|
|
|
|
|
| 5 Xdlt
|
|
|
|
|
|
|
| 6 Kп = 1
|
|
|
|
|
|
|
| 7 T = 15
|
|
|
|
|
|
|
| 8 Кд
|
|
|
|
|
|
|
| 9 Xmax
|
|
|
|
|
|
|
| 10 Xmin
|
|
|
|
|
|
|
| 11 Cнас
|
|
|
|
| РУЧ(26)
| –
| –
|
|
|
|
|
|
|
|
| 1 Сруч
|
|
|
|
|
|
|
| 2 X
|
| 9/1 (Y)
|
|
|
|
|
| 3 Xдст
|
|
|
|
| АВА (11)
|
| –
|
|
|
|
|
|
|
|
| 1 X1
|
| 14/1 (Y)
|
|
|
|
|
| 2 Xc1
|
|
|
|
|
|
|
| 3 Km1
|
|
|
|
|
|
|
| 4 X2
|
|
|
|
|
|
|
| 5 Xc2
|
|
|
|
|
|
|
| 6 Km2
|
|
|
|
| ИЛИ (72)
|
| –
|
|
|
|
|
|
|
|
| 1 C11
|
| 9/3 (Dmax)
|
|
|
|
|
| 2 С21
|
| 9/4 (Dmin)
|
|
|
|
|
| 3 C12
|
| 13 2 (Dв)
|
|
|
|
|
| 4 С22
|
| 13 3 (Dн)
|
|
| НОР (60)
|
| –
|
|
|
|
|
|
|
|
| 1 X11
|
| 6/2 (Y2)
|
|
|
|
|
| 2 X21
|
|
|
|
|
|
|
| 3 Xб1
|
|
|
|
|
|
|
| 4 Xм1
|
|
|
|
|
|
|
| 5 Xd1
|
|
|
|
| ЗАИ (62)
| –
| М
|
|
|
|
|
|
|
|
| 1 X
|
| 10/1 (Y)
|
|
|
|
|
| 2 Cв
|
| 09/1 (D11)
|
|
|
|
|
| 3 Сн
|
| 09/2 (D21)
|
|
|
|
|
| 4 Сб
|
|
|
|
|
|
|
| 5 Vб
|
|
|





