

Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...

Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...
Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
Топ:
Оценка эффективности инструментов коммуникационной политики: Внешние коммуникации - обмен информацией между организацией и её внешней средой...
Марксистская теория происхождения государства: По мнению Маркса и Энгельса, в основе развития общества, происходящих в нем изменений лежит...
Процедура выполнения команд. Рабочий цикл процессора: Функционирование процессора в основном состоит из повторяющихся рабочих циклов, каждый из которых соответствует...
Интересное:
Что нужно делать при лейкемии: Прежде всего, необходимо выяснить, не страдаете ли вы каким-либо душевным недугом...
Искусственное повышение поверхности территории: Варианты искусственного повышения поверхности территории необходимо выбирать на основе анализа следующих характеристик защищаемой территории...
Распространение рака на другие отдаленные от желудка органы: Характерных симптомов рака желудка не существует. Выраженные симптомы появляются, когда опухоль...
Дисциплины:
|
из
5.00
|
Заказать работу |
Содержание книги
Поиск на нашем сайте
|
|
|
|
П -регулятор
Функциональная схема П-регулятора с сервоприводом с пропорциональной или интегральной скоростью перемещения изображена на рис. 1.
Рис. 1. Структурная схема регулятора, состоящего из усилителя, сервопривода и отрицательной обратной связью
Отрицательная обратная связь в регуляторе осуществляется по положению регулирующего органа путем подачи на вход устройства обратной связи сигнала с выхода сервопривода. Конструктивно обратная связь осуществляется с помощью механической, электрической или другой передачи в зависимости от типов сервопривода и командно-усилительного устройства. Характеристики П-регуляторов (операторная и частотная) имеют вид:
Wр (р) = 1 ⁄ Wо.с (р); Wр (iщ) = 1 ⁄ Wо.с (iщ) (1.1)
Для того, чтобы приведенное выше выражение было тождественно уравнению пропорционального регулятора xр = Kр y*, необходимо выполнить условие:
Wо.с (р) = Xо.с (р) ⁄ xр (р) = 1 ⁄ Kр (1.2)
В соответствии с этим условием обратная связь должна выполняться на базе безинерционного усилительного звена. Коэффициент усиления звена обратной связи kо.с = д = 1 ⁄ Kр называют степенью жесткой (т. е. неизменной во времени) обратной связи.
П-регуляторы имеют орган настройки для изменения д (Kр), который служит параметром его настройки. Переходная характеристика реального П-регулятора (рис. 2) несколько отличается от идеального в начальной своей части из-за ограниченной скорости сервопривода.
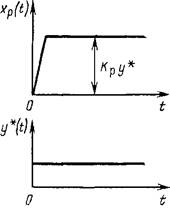
Рис. 2. Кривая переходного процесса П-регулятора
ПД -регулятор
Функциональная схема ПД-регулятора представлена на рис. 3, а. Дифференцирующая составляющая формируется специальным прибором — дифференциатором, обладающим характеристикой реального дифференцирующего звена. На его выходе формируется сигнал, пропорциональный скорости изменения регулируемой величины.
|
|
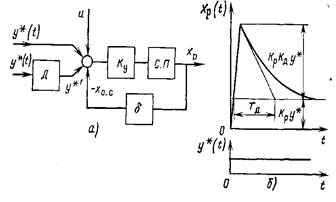
Рис. 3. ПД-регулятор: а — структурная схема; б — кривая переходного процесса
Скоростной сигнал суммируется с сигналом по отклонению регулируемой величины. Результирующий сигнал поступает на вход усилителя. Усилитель и сервопривод охватываются жесткой отрицательной обратной связью. В замкнутом контуре усилитель— привод — обратная связьформируется П-закон регулирования с коэффициентом усиления Kр. Динамическая характеристика реального ПД-регулятора имеет вид

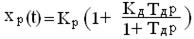
Переходная (временная) характеристика ПД-регулятора с сервоприводом с ограниченной скоростью изображена на рис. 3, б и представляет собой сумму временных характеристик пропорционального и реального дифференцирующего звеньев. Параметром настройки собственно регулятора служит Kр (степень обратной связи д); параметрами настройки дифференциатора служат коэффициент усиления Кд и постоянная дифференцирования Тд, произведение которых характеризует степень ввода дифференциальной составляющей в ПД-закон регулирования.
3. ПИ- регулятор
Реальные ПИ-регуляторы тепловых процессов имеют два вида функциональных схем (рис. 4). В первом варианте (рис. 4, а) сервопривод охватывается отрицательной обратной связью (ООС) и его характеристика не влияет на формирование закона регулирования, целиком определяемого характеристикой устройства обратной связи. Во втором варианте (рис. 4, б) сервопривод не охватывается обратной связью, и ПИ-закон регулирования формируется охватом обратной связью только усилителя Ку. При этом динамические характеристики регулятора в целом определяются динамическими свойствами цепи, состоящей из последовательно включенных замкнутого контура (Ky —Wo . c) и сервопривода. Оба варианта структурных схем ПИ-регуляторов используются в их промышленных исполнениях.
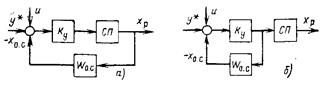
Рис. 4. Структурные схемы ПИ-регуляторов:
|
|
а — сервопривод охваченООС;б — сервопривод не охвачен ООС
В первом варианте устройство обратной связи должно иметь динамическую характеристику реального дифференцирующего звена
В этом случае регулятор в целом независимо от типа сервопривода воспроизводит динамику ПИ-регулятора


Если принять Тд =Ти и Kр =1/Kд, получим
 т.е. передаточную функцию ПИ-регулятора, описываемого также дифференциальными уравнениями
т.е. передаточную функцию ПИ-регулятора, описываемого также дифференциальными уравнениями

 и
и
В промышленных ПИ-регуляторах в качестве обратных связей используют различные устройства: электрические, пневматические и гидравлические. Но все они служат аналогами реального дифференцирующего звена, имеют соответствующие ему динамические характеристики, и называются устройствами гибкой или упругой (изменяющейся во времени) обратной связи.
При втором варианте исполнения ПИ-регулятора (рис. 4, б) возможны два случая: 1) сервопривод имеет характеристику интегрального звена (например, электрический или гидравлический сервопривод с переменной скоростью); 2) сервопривод обладает характеристикой пропорционального звена (мембранный сервопривод с уравновешивающей пружиной). В обоих случаях в соответствии с правилом определения результирующей характеристики двух последовательно включенных звеньев
Wp (p) = WКУУ (p)Wс.п (p), (3.3), гдеWКУУ (p) = 1 ⁄ Wо.с (р).
При использовании сервопривода с передаточной функцией интегрального звена Wс.п (p) = 1⁄ TР передаточная функция регулятора имеет вид

При этом для формирования ПИ-закона с помощью устройства обратной связи необходимо, чтобы выдерживалось соотношение
1/Wо.с (р) = WКУУ (р) = Kр (1+TР) (3.5)
что обеспечивает обратная связь с оператором
Wо.с (р) = Kо.с /(1+TР) = д/(1+TР) (3.6)
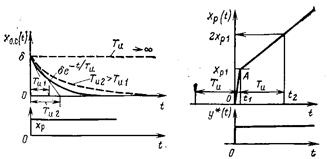
Рис. 5. Переходный процесс в устройстве Рис. 6. Переходный процесс ПИ-регулятора обратной связи
Последнее уравнение служит оператором инерционного звена первого порядка. При охвате Ку такой обратной связью оператор регулятора в целом имеет вид
Wр (р) = Kр (1+1/TиР)
Параметрами настройки ПИ-регулятора служат Kр и Ти.
Если сервопривод имеет характеристику пропорционального звена и не охватывается обратной связью (рис. 4, б), то для того, чтобы выполнялось условие (3.2), Wо. c (p) должно быть реальным дифференцирующим звеном.
Постоянная времени ПИ-регулятора Ти численно равна подкасательной Тд к переходной кривой реального дифференцирующего звена (рис. 5).
|
|
Промышленные регуляторы имеют специальные приспособления— органы настройки для изменения Kр (д) и Ти в достаточно широких, но ограниченных пределах. Так как подача на вход регулятора ступенчатого сигнала не составляет труда, фактически установленные значения Кр и Tи можно легко определить из его экспериментальной переходной кривой (рис. 6). Наклонный участок OA на кривой объясняется наличием у промышленного ПИ-регулятора сервопривода с конечной (ограниченной) скоростью перемещения выходного вала редуктора. Из этого графика следует, что
Kр = xр1 /y* (3.7)
а Ти численно равно времени, необходимому для перемещения выходного вала сервопривода из положения xр1 до его удвоенного значения 2хр1. Отсюда второе название Tи — время удвоения выходного сигнала ПИ-регулятора xр при подаче на его вход ступенчатого сигнала у*.
Из уравнения динамики идеального ПИ-регулятора следует, что Кр /Ти определяет степень ввода интегральной составляющей в ПИ-закон регулирования
Действительно, при безграничном увеличении Ти второй член в
 последнем уравнении стремится к нулю и регулятор из пропорционально-интегрального переходит в П-регулятор. При этом экспонента (вида де- t / T и) на выходе реального дифференцирующего звена, используемого в качестве устройства обратной связи, вырождается в ступенчатый сигнал д (рис. 5).
последнем уравнении стремится к нулю и регулятор из пропорционально-интегрального переходит в П-регулятор. При этом экспонента (вида де- t / T и) на выходе реального дифференцирующего звена, используемого в качестве устройства обратной связи, вырождается в ступенчатый сигнал д (рис. 5).
4. ПИД-регулятор
Закон регулирования
Wр (р) = Kр +Kр /TиР +Kд TдР (4.1)
в реальных регуляторах формируется путем последовательной (рис. 7, а) или параллельной (рис. 7, б) коррекций ПИ-регулятора с помощью реального дифференцирующего (РД) звена. В обоих случаях ПИД-закон воспроизводится лишь приближенно.
При последовательной коррекции


Где

При параллельной коррекции

Где


Рис. 7. Последовательная (а) и параллельная (б) коррекция ПИ-регулятора с помощью дифференцирующего звена
Рис. 8. Переходные характеристики ПИД-регуляторов
ПИД-регулятор имеет четыре параметра настройки: Kр, Tи, Tд и Kд, которые могут быть получены из экспериментальных кривых разгона ПИ-регулятора и РД-звена, снятых по отдельности. Комплексные параметры настройки реального ПИД-регулятора K*р и T* можно определить по формулам (4.2) (4.3).
|
|
На рис. 8. приведена кривая разгона реального ПИД-регулятора с аналоговым выходом (сплошная линия). В отличие от идеального (прерывистая линия) она имеет ограниченный и плавно затухающий «всплеск» x*р, связанный с дифференцированием ступенчатого сигнала с помощью РД-звена.
|
|
|
Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...

Своеобразие русской архитектуры: Основной материал – дерево – быстрота постройки, но недолговечность и необходимость деления...

Особенности сооружения опор в сложных условиях: Сооружение ВЛ в районах с суровыми климатическими и тяжелыми геологическими условиями...

Археология об основании Рима: Новые раскопки проясняют и такой острый дискуссионный вопрос, как дата самого возникновения Рима...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!

