Согласно ГОСТ 1643 кинематическая погрешность есть величина рассогла-сования в углах поворота зубчатого колеса, то есть разность между действии-тельным и номинальным (расчетным) углами поворота ведомого зубчатого ко-леса, выраженная в линейных величинах длиной дуги делительной окружности
колеса.
Кинематическая погрешность возникает в зубчатой передаче в результате радиальных итангенциальных погрешностей обработки (непостоянства радиального положения заготовки и инструмента, а также погрешности обката зубообрабатывающего станка). Это позволяет выявитькинематическую погрешность колеса раздельно: контролем радиальной составляющей, нормируемой радиальным биением зубчатого венца Fr или колебанием измерительного межосевого расстояния (МОР) за оборот зубчатого колеса при комплексной двухпрофильной проверке Fi", а также тангенциальной составляющей, определяемой как погрешность обката Fс или колебание длины общей нормали Fvw.
Различают колебания МОР за один оборот зубчатого колеса F ir" и на одном зубе fir" (это показатель по норме плавности работы передачи). Индекс r обо-значает действительное значение показателя.
В условиях массового и серийного производства зубчатых колес седьмой и грубее степеней точности производится проверка на межцентромерах. Она осуществляется при плотном (беззазорном) зацеплении проверяемого колеса с измерительным колесом, которое выбирают на две степени точнее контролируемого.
Схема межцентрометра показана на рис. 37, а. На рис. 37, б представлен график изменения измерительного МОР.
Fir" и fir" есть разница между наибольшим и наименьшим действительным межосевым расстоянием при зацеплении измерительного зубчатого колеса Z 1с контролируемым зубчатым колесом Z 2при повороте соответственно на один оборот (Ea"r max; Ea"r min;) или на один зуб (ys; yi).
Fir" = Ea"r max- Ea"r min; fir" = ys - yi.
Когда выполнено комбинирование степеней точности норм кинематической точности и плавности работы (т.е. когда берутся разные степени точности для этих норм) F"i комб определяется по формуле:
[ F"i ] комб = [ F"i- f"i ] F + [ f"i ] f,
где допуски, входящие в первое слагаемое (с индексом F), принимаются по сте-пени кинематической точности, а допуск, входящий во второе слагаемое (с ин-дексом f) принимается по степени плавности работы.
Допуски на показатели кинематической точности указаны в табл. П.5.2
Годное колесо должно удовлетворять трем условиям:
1) размер отклонений Ea"r max и Ea"r min не должен выходить за границы ± fa; + Ea"s=f"i; - Ea"i=Tн (для колес с внешним зацеплением, табл. П.5.3,
П. 5.6), что указывает на соблюдение размеров по толщине зубьев;
2) колебания МОР за один оборот F"ir должно быть меньше допуска F"i;
3) колебания МОР на одном зубе f"ir < f"i [1,14].
Колебание длины общей нормали Fvw естьопределяется разностью между наибольшей Wr maxинаименьшей Wr minдействительными длинами общей нормали на одном и том же зубчатом колесе (рис. 35, б):
Fvw = Wr max- Wr min.
Измеряют длины общей нормали на разных участках зубчатого колеса, желательно на каждом зубе с помощью зубомерного микрометра или нормалемера.
Из нескольких результатов измерения (по всем зубьям колеса) выбирают наименьшее и наибольшее значения.
а) 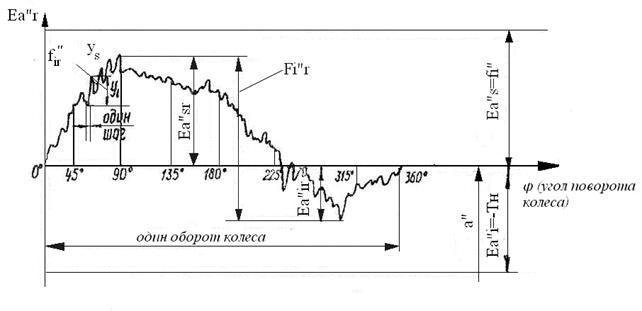
Рис. 37. Контроль колебания измерительного межосевого расстояния:
а - схема межцентромера, б - график результатов изменения измерительного МОР






