Исходными данными для расчета основных размеров круглого эксцентрика (рис. 8.3) являются: δ — допуск на размер заготовки от ее установочной базы до места приложения силы закрепления, мм; α— угол поворота эксцентрика от нулевого (начального) положения; Q — сила закрепления заготовки, Н.

Рис. 8.3. Эксцентриковые зажимы:
А — дисковый эксцентрик, б —эксцентрик с Г-образным прихватом
Если угол поворота эксцентрика не ограничен, то
2 е =s1+d+s2+ 
где s1 — зазор для свободного ввода заготовки под эксцентрик; s2 — запас хода эксцентрика, предохраняющий его от перехода через мертвую точку (учитывает износ эксцентрика); J — жесткость зажимного устройства, Н/мм.
Последний член формулы характеризует увеличение расстояния между эксцентриком и заготовкой в результате упругой деформации зажимной системы. При s1= 0,2÷0,4 мм и s2 = 0,4÷0,6 мм
е =  +(0,3÷0,5) мм
+(0,3÷0,5) мм
Если угол поворота α значительно меньше 180°,
е =  (8.4)
(8.4)
Радиус цапфы эксцентрика (мм) найдем, принимая ширину d;
r = Q /2 bσ см, (8.5)
где σ см — допускаемое напряжение на смятие (15—20 МПа).
При b = 2r
r =  .
.
Радиус эксцентрика R находим из условий самоторможения. Из схемы действующих на эксцентрик сил (рис. 8.4, а) следует, что равнодействующая Т реакции Q и силы трения F должна быть равна реакции со стороны цапфы, проходящей касательно, кругу трения радиуса ρ, и направлено противоположно ей:

где j = угол трения покоя.
Отсюда
R = 
При е ≤ р R min= е + r + Δ, где Δ — толщина перемычки (рис. 8.4, б).

Рис. 8.4. Схема для силового расчёта эксцентриков
Радиус ρ круга трения определяем из равенства ρ = f'r, где f ' —коэффициент трения покоя в цапфе. Величины j и f ' следует брать по наименьшему пределу. Для полусухих поверхностей можно принимать j = 8° и f ' = 0,12÷0,15.
Угол поворота α1 (см. рис. 8.4, а)для наименее выгодного положения эксцентрика найдем по формуле α1 = 90° — j.
Ширину рабочей части эксцентрика В определим из формулы
σ=0,565 
где σ—допускаемое напряжение в месте контакта эксцентрика с заготовкой. Для закаленной стали можно принимать σ = 800÷1200 МПа; Е 1 E 2 — модули упругости соответственно материалов эксцентрика и соприкасающегося с ним элемента (промежуточной детали или заготовки), МПа; µ1, µ2— коэффициенты Пуассона для материалов эксцентрика и соприкасающегося с ним элемента.
При E 1= E 2= E и µ1=µ2= 0,25 получим
σ=0,41 
откуда (при R в мм)
B= 0,17  мм. (8.6)
мм. (8.6)
Размеры эксцентрика е, r, R и В согласовывают с ГОСТом.
Для установления зависимости между силой закрепления Q и моментом на рукоятке эксцентрика в конце закрепления заготовки воспользуемся схемой, показанной на рис. 8.4, б. В процессе закрепления на эксцентрик действуют три силы: сила на рукоятке N, реакция заготовки Т и реакция цапфы S. Под действием этих сил система находится вравновесии. Реакция Т представляет собой равнодействующую силы Q исилы трения F. Сумма моментов всех действующих сил относительно оси поворота эксцентрика
Nl - Qe sin α' - fQ (R - е cos α') - Sρ = 0,
где f — коэффициент трения между эксцентриком и заготовкой.
Сила S мало отличается по величине от нормальной силы Q. Приняв S» Q, получим момент на рукоятке эксцентрика
Nl = Q [ fR + ρ + e (sin α' + f cos α')].
Для упрощения полученного выражения примем:
1) fR = tg j R»sin jR (при j= 6° погрешность меньше 1 %);
2) выражение sin α' + f cos α' заменим sin (α' +j) (погрешность 1 %). После подстановок получим
Nl=Q  (8.7)
(8.7)
Учитывая выражение для R, получим
Nl =  eQ. (8.8)
eQ. (8.8)
По этой формуле момент Nl находят с точностью до 10 %.
Перемещение точки касания эксцентрика с плоскостью при его повороте на угол α от начального положения (рис. 8.5, a)
х = е - с = е - е cos α = е (1 - cos α).

Рис. 8.5. Схемы для расчета перемещения точки контакта эксцентрика с плоскостью при его повороте
На рис. 8.5 б показано изменение х от α. Учитывая, что
x =s1+d+  ,
,
имеем
cos α = 1-  ; α '=180o- α
; α '=180o- α
Подставляя найденное значение α ' в формулу (8.8), можно выразить момент на рукоятке эксцентрика через исходные величины.
Расчёт клиновых зажимов
Клиновые зажимыприменяют в качестве промежуточного звена в сложных зажимных системах. Они просты в изготовлении, компактны, легко размещаются в приспособлении, позволяют увеличивать и изменять направление передаваемой силы. При определенных углах клиновой механизм обладает свойствами самоторможения. Для наиболее распространенного в приспособлениях односкосного клина (рис. 8.6, а) при действии сил под прямым углом имеем следующую зависимость, полученную из силового многоугольника:
 .. (8.9)
.. (8.9)
При знаке минус в формуле имеем зависимость для открепления клина. Самоторможение происходит при α < φ1 + φ2 . Если φ1 = φ2.= φ3 = φ. то зависимость упрощается:


Рис. 8.6. Действие сил в клиновом механизме:
а — с углом 90°; б — с углом более 90°
При передаче сил под углом β > 90° (рис. 8.6, б)зависимость между Pи Q из силового многоугольника имеет вид (при 90 + α > β)
 .
.
Если угол трения постоянен и равен φ, то
 .
.
Расчёт рычажных зажимов
Рычажные зажимыаналогично клиновым применяют в сочетании с другими элементарными зажимами, образуя более сложные зажимные системы. С помощью рычага изменяют величину и направление передаваемой силы, осуществляют одновременное и равномерное закрепление заготовки в двух местах.
Для наиболее распространенного в зажимных устройствах двуплечего рычага (рис. 8.7, а) отношение между силами N и Q найдем, беря сумму моментов относительно оси вращения О
 .
.
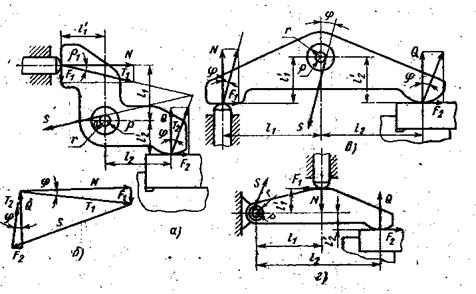
Рис. 8.7. Действие сил в рычажных механизмах.
Из силового многоугольника (рис, 8.7, б) приближенно  .
.
при l1 < l2 S ≈ 0.96 N + 0,4 Q; (8.10)
при l1 = l2 = l S ≈ 1,41 Q; (8.11)
при l1 > l2 S ≈ 0.96 Q + 0,4 N. (8.12)
Подставляя значения S в уравнение равновесия, получим
для условия (31)  ; (8.13)
; (8.13)
для условия (32)  ; (8.14)
; (8.14)
для условия (33)  .(8.15)
.(8.15)
В этих формулах радиус круга трения ρ = f' r. Значение f' можно брать 0,18—0,20.
Из полученных зависимостей видно, что для уменьшения потерь на трение нужно уменьшать радиус оси иплеча l' 1 и l' 2.
Для. рычага, показанного на рис. 8.7, в, уравнение равновесия будет такое же, как и для предыдущего случая. Однако
 .
.
Подставляя S в уравнение равновесия, получим

 .
.
Для рычага, показанного на рис. 8.7, г, эта зависимость имеет вид
.







