Имеющиеся в цистернах жидкие грузы при неполном заполнении цистерн в случае наклонения судна смещаются в сторону наклонения. 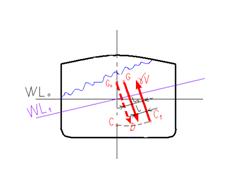 Из-за этого в ту же сторону смещается ЦТ судна (из точки Go в точку G), что приводит к уменьшению плеча восстанавливающего момента.
Из-за этого в ту же сторону смещается ЦТ судна (из точки Go в точку G), что приводит к уменьшению плеча восстанавливающего момента.
Допустим, жидкий груз находится в одном из отсеков, ширина которого равна половине ширины судна. Найдём изменение поперечной δ h и продольной δ H метацентрических высот.
Первоначально считаем, что жидкий груз не перемещаетсяпри наклонении судна, тогда на судно действует момент
 .
.
Предоставим возможность жидкому грузу перемещаться при наклонении судна. В результате этого образуется дополнительный момент
 ,
,
где γж − удельный вес жидкого груза, т/м3;
ix − момент инерции свободной поверхностижидкого груза относительно оси ox.
θ − угол крена.
Тогда исправленный момент

Исправленная поперечная метацентрическая высота
 .
.
Изменения поперечной и продольной метацентрических высот от влияния свободной поверхности жидкости

Влияние свободной поверхности жидкости при построении диаграммы статической остойчивости заключается в учёте поправки поперечной метацентрицентрической высоты δ h.
Следует всегда иметь в виду, что при наличии свободной поверхности жидкого груза остойчивость всегда снижается и величина этого снижения линейно зависит от площади свободной поверхности.
60. Радионавигационные системы определения места судна. Измеряемые навигационные параметры, источники погрешностей, точность.
SEE ALSO ALRS Vol. 2
With worldwide coverage by satellite navigation systems, the use of hyperbolic positioning systems at sea declining. The Omega system has ceased operation, and under present plans the Decca Navigator System will cease to operate in Europe around the year 2000. LORAN C, however, is to be retained for the time being in certain areas. It will be available to maritime users as the terrestrial electronic position fixing service to back-up global satellite systems.
The use of lattice charts with hyperbolic positioning systems has declined, because most receivers convert the readings to latitude and longitude. These receivers display positions referred to a particular horizontal datum (e.g. WGS 84). This may not be the datum of the chart in use. The user must still remember that hyperbolic systems have inherent errors, and that the apparent accuracy of the displayed positions should be treated with caution.
Some equipment processes data from several electronic positioning systems (e.g. Decca, LORAN and GPS) and computes the best possible position, so providing a valuable check of one system against another. The use of such equipment does not remove the responsibility of the navigator to check the position periodically using other means, including visual aids.
Users should be vigilant when receivers are capable of reverting to dead reckoning (DR) mode. Serious accidents have occurred when faults in sensors and antennae connections have caused the receiver to switch to DR mode undetected by the watchkeepers.
Some terrestrial hyperbolic navigation receivers give a numerical indication of positional accuracy in the form of values of Horizontal and Positional Dilution of Precision (HDOP and PDOP). Users should refer to the equipment manual, as the receiver will not necessarily allow for fixed or variable errors in the system.
The Decca Navigator System. Decca Marine Data Sheets give the fixed errors for geographical areas where these are known. Where no errors are given, it should not be assumed that no error exists. In areas where no fixed errors are given, Decca positions should be treated with caution, especially when near the coast and in restricted waters. Receivers which convert positional data to latitude and longitude may not take fixed errors into account. Decca is also subject to variable errors which depend on the time of day, season and distance from the transmitters. The error in a given location is not constant, and the Decca Marine Data Sheets give diagrams and tables which can be used to predict an approximate error based on a 68% probability level, (i.e. they are not to be exceeded on more than one in three occasions). Lane Slip. Particularly at night, there is possibility of slipping lanes due to interference such as excessive Decca skywave signals, external radio interference and electric storms. The possibility of this happening is small at short range, but increases towards the edge of Decca coverage. Fouling of the Decca antenna and disruptions to the power supply can also cause lane slip. It can best be detected by plotting the ship’s position at regular intervals and comparing with fixes obtained by other means.
The LORAN C system. LORAN C has a greater range than Decca and is based on the measurement of time difference between the reception of transmitted pulses. The ground-wave coverage is typically between 800 and 1200 miles, although the accuracy of positional information will depend upon the relative position of the transmitters. When entering the coverage, or when passing close to transmitters on the coast, the receiver may have difficulty in identifying the correct ground-wave cycle to track. Care should be taken to ensure that it is tracking on the correct cycle. The fixed errors of the LORAN C system are caused by variations in the velocity at which the pulses travel. Additional Secondary Factor (ASF) corrections are provided to allow for these errors. Account should be taken of ASF corrections which may be very significant in some areas. Some receivers automatically allow for calculated ASF values and display a corrected position.
61. Спутниковые системы для определения места судна. Источники погрешностей, характеристика точности определения места.
Глобальные навигационные спутниковые системы (ГНСС) предназначены для определения положения объектов на поверхности Земли. В настоящий момент получили широкое распространение две системы: ГЛОНАСС (Россия) и NAVSTAR - GPS (США).
В соответствии с положениями новой Главы 5 "Безопасность мореплавания" Конвенции СОЛАС, безусловным требованием, касающимся как судов, построенных до 1 июля 2002 г., так и позднее этого срока, является дополнительное оснащение всех судов независимо от их размера приемниками ГНСС или другой радионавигационной системы, действующей в районе плавания.
Система NAVSTAR (Navigation Satellite Time and Ranging - навигационный спутник измерения времени и координат), часто именуемая GPS (Global Positioning System - глобальная система позиционирования), позволяет практически в любом месте Земли (за исключением приполярных областей) определить местоположение и скорость объектов. Основой системы являются 24 GPS - спутника, движущихся над поверхностью Земли на высоте 20180 км. спутники движутся по 6 орбитальным траекториям (по 4 спутника на каждой), плоскости траекторий разнесены на 55 градусов. GPS - спутники излучают специальные сигналы в диапазоне 1575,42 МГц.
Передаваемые спутниками навигационные сигналы, принимаются GPS - приемниками, которые на основе метода триангуляции полученных сигналов позволяют определить местоположении объекта. Используемый в гражданском применении C/A - код (coarse-acquisition) позволяет определить координаты объекта с точностью до 100 м. Используемый ВМФ США точный P-код предоставляет возможности по позиционированию с точностью до 20 м.
Система ГЛОНАСС (Global Navigation Satellite System - глобальная навигационная спутниковая система), как и система GPS, позволяет практически в любом месте Земли (за исключением приполярных областей) определить местоположение и скорость объектов. Основой системы являются 24 спутника (в настоящий момент число спутников существенно сокращено), движущихся над поверхностью Земли на высоте 19130 км. Спутники движутся по 3 орбитальным траекториям, плоскости траекторий разнесены на 64,8 градуса. ГЛОНАСС - спутники излучают специальные сигналы в диапазоне 1598,0625 - 1604,25 МГц.
Передаваемые спутниками навигационные сигналы, принимаются ГЛОНАСС - приемниками, которые на основе метода триангуляции полученных сигналов позволяют определить местоположении объекта. Используемый в гражданском применении код позволяет определить координаты объекта с точностью до 57-70 м. В режиме обычного доступа ГЛОНАСС превосходит GPS по точности, обеспечивая при этом, возможность работы в более высоких широтах.
Ввиду недостаточной точности обсерваций, необходимой для обеспечения плавания в узкостях, рекомендации ИМО предполагают дополнительное использование дифференциальной подсистемы GPS и ГЛОНАСС (специальный метод, использующий корректирующую информацию от наземных станций), позволяющей повысить точность определения места до 5 - 10 м.
The NAVSTAR GPS Standard Positioning Service (SPS) now provides a global positioning capability giving a 95 % accuracy in the order of 100 meters. The system is capable of much greater accuracy, but the commercial service is deliberately degraded by Selective Availability (SA). Differential GPS (DGPS) is also becoming more widely available. DGPS receivers apply instantaneous corrections to raw GPS signals determined and transmitted by terrestrial monitoring stations. Positional accuracy of better than 5 meters may be possible.
The GLONASS system is fully operational and available to commercial users. The system is similar to GPS and also provides global positioning for 24 hours a day. Some receivers use both GPS and GLONASS signals to compute a more precise position. The repeatable accuracy of GLONASS is higher than GPS as there is no degrading of signals by SA. When navigating in confined waters, navigators must bear in mind that the displayed position from any satellite positioning system is that of the antenna.
Serious accidents have occurred because of over-reliance upon global satellite positioning equipment. In one case a passenger vessel grounded in clear weather because the watchkeepers had relied totally on the GPS output which had switched to DR mode because of detached antenna. The switch to DR mode was not detected by the watchkeepers. Checking the position using other means, including visual observations, would have prevented the accident.
GPS positions are referenced to the global datum WGS 84. This may not be the same as the horizontal datum of the chart in use, meaning that the position when plotted may be in error. The receiver may convert the position to other datums. In this case the observers must ensure that they are aware of the datum of the displayed position. Where the difference in datums is known, a note on the chart provides the offset to apply to positions referenced to WGS 84, but where this is not given the accuracy of the displayed position should be treated with caution. DGPS positions are normally referenced to WGS 84 though local datums may be used (e.g. NAD 83 in the USA). Also, when using DGPS, it is possible tat the positioning of charted data may not be as accurate as DGPS position. Mariners should therefore always allow a sensible safety margin to account for any such discrepancies.
From April 1998, a new Volume 8 of The Admiralty List of Radio Signals, entitled Satellite Navigation Systems will contain full descriptions of all satellite systems, including GPS and DGPS, as well as notes on their correct use and limitations. Also included will be descriptions and examples of over-reliance on GPS, together with advantages and disadvantages of using DGPS, and a full account of the problems caused by differing horizontal datums. Mariners using satellite navigation systems are strongly advised to study the information and follow the advice contained in this publication.






