Рассмотрим пример, когда ТС, совершившее наезд, и ТС-препятствие движутся в попутном направлении (рис. 3.4).
Для выяснения, была ли у водителя ТС, совершившего наезд, возможность увидеть пешехода, начавшего движение по проезжей части, необходимо определить ширину зоны обзорности Доб на уровне линии следования пешехода (рис. 3.5).
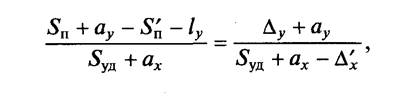
Из подобия треугольников ACD и ABE находим
или

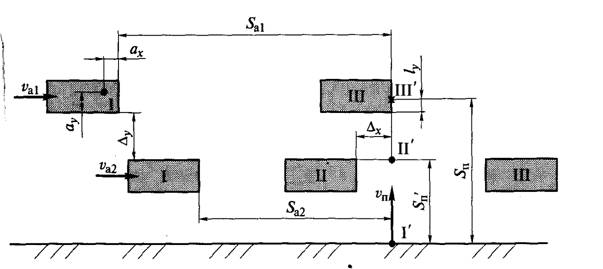
Рис. 3.4. Схема наезда транспортного средства на пешехода
при обзорности, ограниченной попутным транспортным средством:
I – положение транспортных средств и пешехода в момент возникновения опасной обстановки;
II – положение транспортного средства-препятствия и пешехода в момент, когда пешеход покинул полосу движения этого транспортного средства;
III – положение транспортного средства и пешехода в момент наезда
на пешехода.
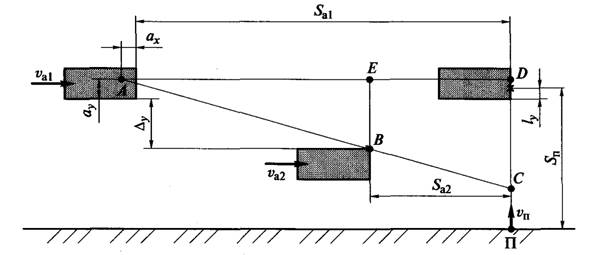
Рис. 3.5. Схема к определению ширины зоны обзорности
откуда

где ау, ах – координаты места водителя в ТС, совершившем наезд;
Sa 1 – удаление ТС, совершившего наезд, от места наезда в момент начала движения пешехода по проезжей части:
Sa 2 – удаление ТС – препятствия от линии следования пешехода в момент начала движения пешехода по проезжей части:

t 'п – время движения пешехода из положения П в положение, соответствующее точке С’ (рис. 3.6):
После нахождения величины Воб необходимо провести анализ неравенства

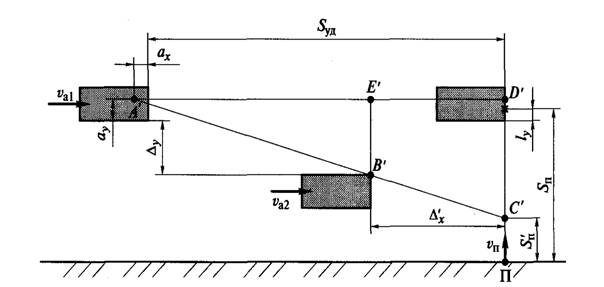
Рис. 3.6. Схема к определению удаления транспортного средства от места наезда в момент наступления неограниченной обзорности пешехода:
Δ x – расстояние от второго транспортного средства
до линии следования пешехода
Если неравенство выполняется, при va 1 > va 2 ТС – препятствие не ограничивало водителю ТС, совершившего наезд, видимости пешехода в момент начала движения последнего по проезжей части.
При равных скоростях ТС S а1 представляет собой расстояние видимости пешехода, т.е. Sa 1 = S уд.
Если же неравенство не выполняется, в момент начала движения пешехода по проезжей части ТС – препятствие ограничивало водителю ТС, совершившего наезд, видимость пешехода. В этом случае необходимо определить удаление ТС, совершившего наезд, от места наезда в момент, когда ТС-препятствие уже не ограничивало водителю первого ТС обзорность пешехода.
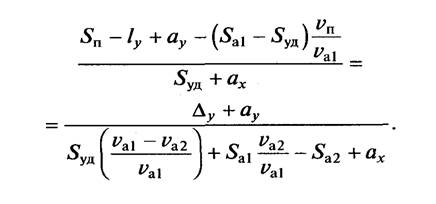
Из подобия треугольников A ' C ’ D ' и А'В'Е' находим
где

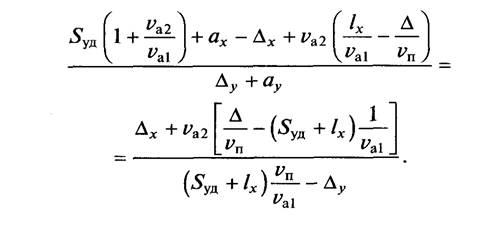
После подстановки величин S 'п, Δ ' x и S ' a 2 в уравнение получим
После подстановки в это уравнение числовых значений входящих в него параметров и соответствующих преобразований получим квадратное уравнение типа

где Р, Q – коэффициенты, зависящие от параметров, входящих в уравнение. В результате
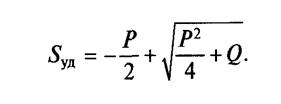
Решив уравнение, получим удаление Sy д ТС, совершившего наезд, от места наезда в момент, когда ТС – препятствие уже не ограничивало видимость пешехода.
Затем рассчитывают остановочный путь So ТС, совершившего наезд, и сравнивают его с Sy д.
Сравнивая So и Sy д, можно определить, имел ли водитель ТС в данных условиях техническую возможность предотвратить наезд на пешехода путем торможения с момента, когда ТС – препятствие уже не ограничивало видимости пешехода.
В случае удара пешехода боковой поверхностью ТС уравнение примет вид:
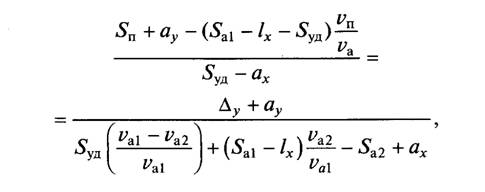
где lx – расстояние от передней части ТС до места удара.
Остальные расчеты выполняют по приведенной методике.
Рассмотрим случай, когда обзорность ограничена встречным ТС (рис. 3.7, а).
Из подобия треугольников ACD и ABE (рис. 9.7, б) можно записать

Рис. 3.7. Схема наезда транспортного средства на пешехода
при обзорности, ограниченной встречным транспортным средством:
а, б – положения транспортных средств и пешехода в момент начала движения пешехода по проезжей части и в момент обнаружения водителем транспортного средства, совершившего наезд, соответственно;
I, II, III – положения транспортных средств;
I’, II’, III’ – положения пешехода;
Δ – расстояние от границы проезжей части до полосы движения транспортного средства, совершившего наезд;
где
Sa 2 – путь, пройденный встречным ТС из положения I в положение II:

При фронтальном ударе
где Δ – расстояние от границы проезжей части до полосы движения ТС, совершившего наезд.
Решив это уравнение относительно S уд, исследования проводят обычным образом.
При ударе боковой поверхностью ТС уравнение принимает вид