Эмиссия газов от очистных сооружений канализации: В последние годы внимание мирового сообщества сосредоточено на экологических проблемах...

Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
Эмиссия газов от очистных сооружений канализации: В последние годы внимание мирового сообщества сосредоточено на экологических проблемах...
Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
Топ:
Комплексной системы оценки состояния охраны труда на производственном объекте (КСОТ-П): Цели и задачи Комплексной системы оценки состояния охраны труда и определению факторов рисков по охране труда...
Установка замедленного коксования: Чем выше температура и ниже давление, тем место разрыва углеродной цепи всё больше смещается к её концу и значительно возрастает...
Проблема типологии научных революций: Глобальные научные революции и типы научной рациональности...
Интересное:
Что нужно делать при лейкемии: Прежде всего, необходимо выяснить, не страдаете ли вы каким-либо душевным недугом...
Национальное богатство страны и его составляющие: для оценки элементов национального богатства используются...
Средства для ингаляционного наркоза: Наркоз наступает в результате вдыхания (ингаляции) средств, которое осуществляют или с помощью маски...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
При решении задач по предупреждению столкновений судов аппаратура АИС имеет ряд преимуществ перед РЛС и САРП. Отметим из них следующие.
Использование АИС приводит к увеличению дистанции, на которой обнаруживаются суда, причем расстояние обнаружения не зависит от размеров и ракурса судов-целей. Дальность УКВ связи, применяемой для передачи сообщений АИС, зависит от высоты антенны и составляет порядка 20+30 миль. При использовании РЛС дистанция обнаружения судов зависит от их тоннажа и ракурса. При отсутствии помех распространению радиоволн и их приему средне тоннажные суда обнаруживаются с помощью РЛС на расстояниях 10+18 миль, а малые суда - 3+10 миль.
Благодаря оборудованию судов высокоточными системами для определения своих кинематических параметров, и АИС- транспондером для передачи этих данных всем пользователям, повышается точность знания положения и элементов движения судов-целей, а, следовательно, эффективность расхождения с ними.
АИС позволяют получать элементы движения судов практически в реальном масштабе времени как при движении судов-целей одним курсом, так и при маневрировании. Это время не зависит от скорости цели. В САРП кинематические параметры объектов получаются путем фильтрации их отметок на определенном временном интервале. Поэтому после захвата цели на сопровождение и после маневрирования на определение ЭДЦ с требуемой точностью затрачивается порядка двух-трех минут. Это время зависит от скорости цели. На оценку ЭДЦ тихоходных целей САРП затрачивает больше времени, чем на нахождение кинематических параметров быстроходных объектов. ЭДЦ маневрирующих целей САРП определяет с очень низкой точностью. Ввиду инерционности фильтра, данные САРП об элементах движения целей обладают запаздыванием порядка 1 минуты.
|
|
При использовании АИС уменьшается время обнаружения маневра цели. Выявление начала маневрирования при использовании АИС производится за счет контроля изменения передаваемых целью значений своего курса, а в ряде случаев - и значений угловой скорости.
В САРП маневр обнаруживается путем статистического определения факта отклонения отметок цели от гипотезы прямолинейного равномерного движения. По данным исследований, проведенных специалистами, среднее время на выявление маневра по РЛС/САРП составляет 1 мин 25 с, а по АИС - 20 с.
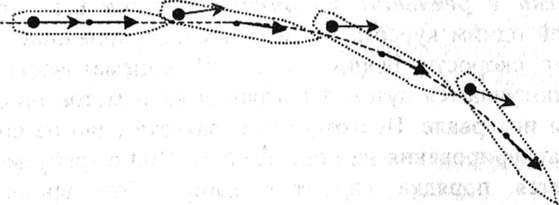
У АИС нет и ряда других недостатков САРП, например, представления ошибочной картины маневрирования груженного большого танкера с настройкой на корме. Радиолокационная отметка такого танкера соответствует корме. Движение кормы при маневре курсом судна отличается от движения центра массы (рис. 5.2), что способствует еще большей задержке в выявлении маневра.
При использовании АИС на дистанцию обнаружения судов-целей и точность определения их элементов движения не влияют помехи от моря, осадков, наличие теневых секторов и работа других РЛС, как это имеет место при использовании РЛС и САРП. В результате обеспечивается возможность своевременного обнаружения малых судов-целей и наблюдения за этими судами в условиях сильного волнения моря и интенсивных осадков.
АИС позволяет сопровождать цели и получать их элементы движения при близком нахождении целей от берега и при движении в узком канале. Она исключает возможность «обмена объектов» при близком нахождении целей друг от друга.
|
Рис. 5.2. К пояснению увеличения задержки выявления с помощью САРП маневра курсом большого груженого танкера. |
На сопровождение целей в САРП влияет разрешающая способность радиолокатора и величина стробов для селекции отметок сопровождаемых объектов, что может вызвать невозможность получения координат целей при движении их вблизи берега и «переброс» маркеров целей («обмен объектов») при их близком прохождении друг от друга.
|
|
Предупреждению столкновений судов способствует также взаимный обмен по линии АИС информацией о названии и типе судна, о его позывном, MMSI-номере, размерах, осадке, о наличии опасного груза, о навигационном статусе. На экране ECDISдля получения такой информации АИС-цель «выбирается» с помощью манипулятора. Зная название судна, его позывной, MMSI-номер, судоводитель с помощью УКВ радиотелефона или GMDSS-аппаратуры может связаться с любым судном для координации действий. С помощью радиолокационной системы указанных сведений о судне получить невозможно.
6. Станция управления движением судна
Назначение и структура.
Назначение. Бортовая станция управления движением - СУД (ManeuveringControlStation) служит для дистанционного управления судовыми силовыми средствами и для задания различных режимов управления движением судна. На ней сосредоточены органы для управления курсом, траекторией и скоростью судна.
СУД представляет собой пульт управления. Силовые средства, используемые при маневрах судна, и системы дистанционного управления ими характеризуются в специальных курсах подготовки штурманского состава.
Состав. На станции управления движением судна расположены:
• Многофункциональный штурвал (или круглая поворотная рукоятка) для управления курсом;
• Панель органов управления курсом и траекторией (SteeringControls);
• Панель органов дистанционного управления пропульсивными устройствами (MainEngineandThrustersControls));
• Дисплей для вождения судна (коннинг дисплей).
|
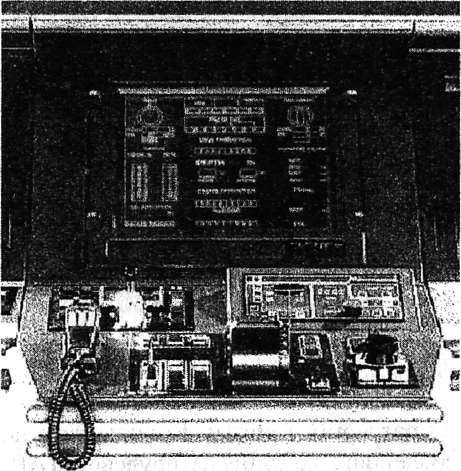
Рис. 6.1. Внешний вид станции управления движением судна. |
Когда судно полностью управляемо по всем горизонтальным степеням свободы на предельно малых скоростях хода и снабжено дистанционной автоматизированной системой управления позиционированием (маневровой системой), то на станции управления имеется дополнительно панель органов управления маневровой системы.
Состав органов управления на панелях станции зависит от конфигурации движительно-рулевого комплекса судна и типа систем для управления им. На рис. 6.1 приведен общий вид станции управления движением интегрированного мостика фирмы LittonMarineSystems.
|
|
Панели органов управления.
Панель для управления курсом и траекторией. На этой панели размещены органы, с помощью которых производится ручное управление судном по курсу, выбираются режимы управления курсом и траекторией судна, задаются параметры поворотов, производится настройка авторулевого.
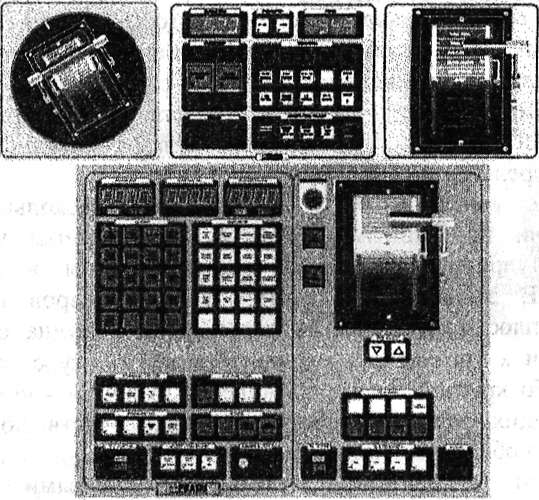
Внешний вид панели управления курсом и траекторией СУД интегрированной системы ходового мостика фирмы «Praxixautomationtechnology» (Голландия) представлен на рис 6.2.
|
Рис. 6.2. Панель управления курсом и траекторией. |
Режимы управления курсом. Количество таких режимов зависит от типа установленного на судне авторулевого (АР).
Ручные режимы. Может быть два ручных режима для управления судном по курсу: «простой» и «следящий» или только один «следящий» режим.
Автоматические режимы управления курсом. Если на судне установлен неадаптивный АР, то автоматический режим один. Он обычно именуется - «Автомат» (Auto).В этом режиме, если не производится ручная настройка, коэффициенты закона регулирования остаются постоянными. Поэтому этот режим иногда называют«Auto- fixed».
Когда на судне адаптивный АР, то может быть несколько автоматических режимов управления курсом: один без адаптации «Auto-fixed»и два или три с адаптацией, отличающиеся используемым критерием оптимальности. Это может быть критерий безопасности, направленный на обеспечение максимальной точности регулирования, и экономичный - предусматривающий минимальный расход ресурсов. Первый из этих режимов часто называют «Стесненные воды» (Confinedwaters),второй - «Открытое море» (Opensea).
У некоторых адаптивных АР имеется и третий режим адаптации, специально для оптимизации управления в условиях шторма - «Штормовые условия» (Roughsea).
В режиме«Auto-fvced»авторулевой выполняет регулирование курса по неизменному закону с постоянными коэффициентами, некоторые из которых можно подстроить вручную.
В режимах адаптации при изменении внешних и внутренних условий работы авторулевой самостоятельно изменяет характер управления для обеспечения наилучшего по выбранному критерию качества управления. Адаптивные авторулевые обычно приспосабливаются к изменению загрузки, скорости судна, глубины на мелководье, к изменению степени волнения и характера рыскания.
|
|
Режимы управления движением по траектории. Суда, на которых устанавливаются ИСМ, снабжаются системой автоматической вождения судна по заданной траектории - САВТ (TrackControlSystem).
Со станции управления движением может устанавливаться ручной или автоматический режим проводки судна по траектории.
В автоматическом режиме САВТ сама без непосредственного участия человека проводит судно по запланированному пути, элементы которого должны храниться в памяти ИСМ. Автоматический режим часто именуют навигационным режимом(NAV). Для него могут использоваться и названия: "Tracksteering", "Trackkeeping", "Trackauto". Некоторые САВТ дополнительно к названному имеют автоматический режим управления, обеспечивающий движение к заданной точке (Waypointsteering).
Регулировки для режима«Auto-fixed».В различных типах авторулевых при ручной настройке на качественное управление регулируются разные параметры. Для настройки большинства находящихся в эксплуатации авторулевых используется три-четыре регулировки. Встречаемые в АР виды регулировок приведены ниже.
Регулировка общего коэффициента усиления управляющего сигнала (кР). Такая регулировка называется «Руль» {Rudder).С ее помощью пропорционально изменяется величина вырабатываемого АР заданного значения перекладки руля. Диапазон выбора кр обычно составляет 0.5+5.0.
Регулировка коэффициента усиления управляющего сигнала, пропорционального производной рыскания {кД). Регулировка кд определяет степень одерживания судна рулем. Чаще всего она называется «Контрруль»{Counterrudder).Диапазон изменения значений кд лежит в пределах от 0 до 30. Для установки регулятора обычно используется шкала с условными делениями, от нуля до единицы, либо от нуля до десяти.
Регулировки для подстройки АР к работе при плохой погоде. Для этой цели может применяться регулировка зоны нечувствительности, либо регулировка скорости руля. Они предназначены для уменьшения частоты и величины перекладок руля при рыскании судна на волнении.
С помощью первого регулятора загрубляется работа авторулевого путем увеличения диапазона его нечувствительности в условиях волнения. Зона нечувствительности может выбираться в пределах 0°+3°. Этот регулятор называется «Рыскание»{Yaw).В некоторых АР для него используется название «Погода»{Weather).
Регулятор «Скорость руля»{Rudder'srate)служит для снижения реакции авторулевого на волновое рыскание путем уменьшения скорости руля. С увеличением рыскания судна от волн скорость руля уменьшают. Диапазон выбора регулируемого параметра обычно составляет 1.5-^-5.0 °/с.
Регулировка «Рулевой предел» {Rudderlimit)используется для ограничения максимального значения перекладок руля. Применяется она с целью избежания значительных углов крена при поворотах. Диапазон выбора ограничений обычно составляет 5°+35°.
|
|
Задание автоматически выполняемых поворотов включает установку: функции поворота, ее параметра, значения нового курса.
Наиболее распространенными функциями автоматического изменения курса являются: - с заданной угловой скоростью,
- с заданным радиусом.
Установка значений параметра функций поворотов может быть плавной либо дискретной.
В зависимости от времени начала выполнения могут быть два режима поворотов:
■ с началом в момент установки нового курса (AcceptHTS),
■ с началом по дополнительной команде после назначения нового курса (PresetHTS).
Панель пропульсивных установок. На этой панели располагаются органы управления главным двигателем и подруливающими устройствами. В качестве примера на рис. 6.3 представлена панель пропульсивных установок фирмы «Praxixautomationtechnology».
|
Рис. 6.3. Панель управления главным двигателем, носовым поперечным и кормовым азимутальным подруливающими устройствами |
Для изменения и поддержания скорости хода могут выбираться следующие режимы управления главным двигателем:
• Нормальный маневренный,
• Замедленный экономичный для набора и снижения скорости,
• Для длительного движения одним ходом,
• Экстренный.
С панели управления пропульсивными установками на СУД может обеспечиваться выполнение следующих операций:
- пуск подготовленною к работе ГД, а в случае неудачного первого пуска - повторные попытки с подачей светозвукового сигнала;
- реверс ГД, в особых случаях экстренный реверс дизеля с подачей контр воздуха при определенном снижении частоты вращения с возможностью одновременного отключения защит, кроме защиты по разносу двигателя;
- изменение частоты вращения вала ГД в соответствии с нормальной, замедленной и экстренной программами управления;
аварийная остановка ГД при подаче соответствующей команды с пульта управления;
независимый от компьютерного ручной режим управления главным двигателем с мостика.
Панель маневровой системы. Суда, которые на предельно малых скоростях способны управляться по всем горизонтальным степеням свободы, называются вполне или полностью управляемыми. Для обеспечения такой управляемости судно снабжается достаточным числом вспомогательных силовых средств: поперечными и/или азимутальными подруливающими устройствами, активными рулями или другими средствами.
На вполне управляемых судах, имеющих несколько силовых органов, стали популярными джойстиковые системы управления, значительно упрощающие задачу маневрирования в стесненных акваториях. В этих системах выполнение маневров сводится к управлению плоскопараллельным перемещением судна с помощью джойстика и к управлению его ориентацией по курсу с помощью штурвала либо круглой поворачивающейся рукоятки -кноба. Выбор соответствующих режимов работы силовых средств по командам джойстика и кноба выполняет компьютер.
Переход от оперирования отдельными силовыми средствами (винтами, рулями, подруливающими устройствами...) к управлению только плоскопараллельным движением и ориентацией по курсу, позволяет минимизировать количество органов для ручного управления маневрами судна.
Системы для упрощенного выполнения маневров на предельно малых скоростях хода называют электронными маневровыми системами. Их также именуютджойстиковыми дистанционными системами управления судном, либо системами дистанционного автоматического управления позиционированием (ДАУП). Эти системы устанавливаются на пассажирских лайнерах и паромах, ро-ро судах, буксирах спасателях, танкерах, газовозах и на других судах, деятельность которых связана с частыми маневрами при малых скоростях движения или с необходимостью обеспечения повышенной безопасности.
Современные джойстиковые маневровые системы являются компьютеризованными. Они имеют режимы:
ручного управления плоскопараллельным движением с помощью джойстика и ориентацией по курсу с помощью кноба; ручного управления плоскопараллельным движением с автоматической стабилизацией курса.
В ИСМ на станции управления движением на панели маневровой системы располагаются:
• включатель маневровой системы в работу;
• кноб - круглая рукоятка для управления курсом (вращением корпуса);
• переключатель трех видов поворотов судна с центром: в носу, на миделе, в корме\
• переключатель двух режимов управления курсом: ручного и автоматического;
• джойстик - рукоятка для управления плоскопараллельным движением судна.
|
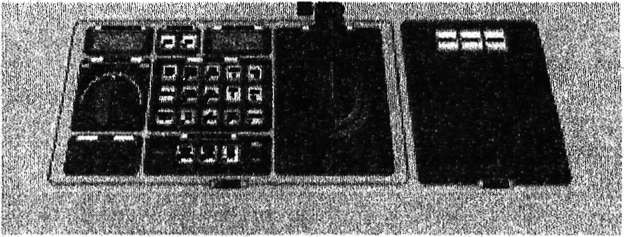
Рис. 6.4. Панель управления маневровой системы. |
В качестве примера на рис, 6.4 показана панель управления маневровой системы фирмы «Praxixautomationtechnology».
При управлении плоскопараллельным движением сторона наклона джойстика, задает направление силы упора, которую должны создать силовые средства. Величина наклона джойстика определяет модуль результирующей силы упора.
Кнобом в режиме ручного управления курсом задается величина момента для поворота судна. Сторона, в которую поворачивается кноб, определяет направление изменения курса. Угол отворотакноба от нулевого положения задает величину управляющих сил, обеспечивающих поворот судна относительно выбранного центра вращения.
В режиме авто ориентации кнобом устанавливается курс, который должна автоматически удерживать маневровая система. Поворот
судна, при установке для стабилизации нового заданного значения курса, в этом режиме ориентации выполняется относительно выбранного центра вращения.
Коннинг дисплей.
Монитор СУД служит для отображения входных и выходных параметров систем управления судном и называетсяконнинг дисплеем(ConningDisplay). Это название происходит от английского слова con, которое означает - вести судно.
Коннинг дисплей представляет судоводителю заданные и текущие значения управляемых величин, основные элементы движения судна, параметры действующих на судно возмущений.
|
|
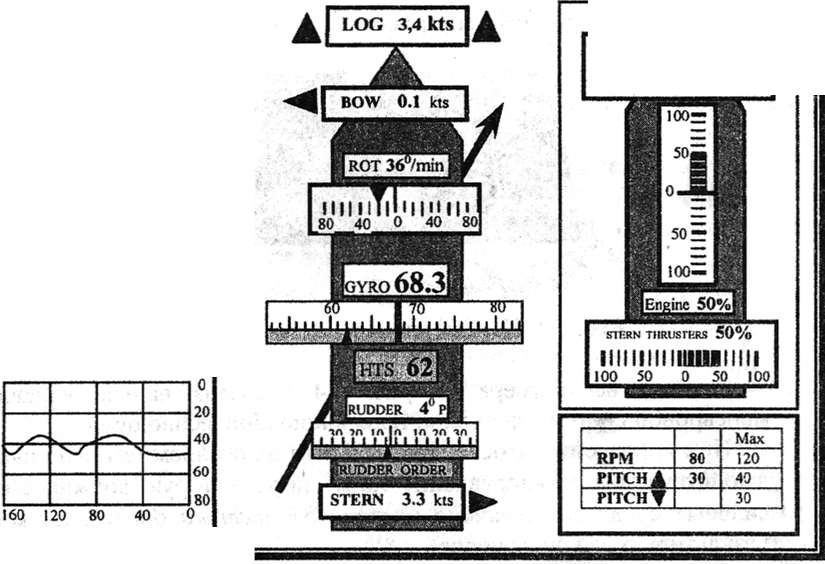
| Рис. 6.5. Форма отображение данных для процессов швартовки |
| ' TIIRUSTBRS60% inifiimiiiiiiiiii 100 50 0 50 100 |
| 2001/05/27 UTS: 03:30 SST: 18:30 DGPS LAT: N 35°00.00' LON: Е 157°32.0' DTM: WGS84 COG: 98.4° SOG: 4.1 kts |
| TRUE WIND 065° 4.0 kts (fc> |
| REL WIND 082° 7.0 kts |
| Depth38.3 m |
Информация о параметрах систем управления может отображаться на коннинг дисплее в форме для перехода - VoyageScreen, или в форме для швартовки - Berthing (docking) Screen. Если на судне имеется джойстиковая маневровая система, то может быть две формы для швартовки - с применением джойстиковой системы и без нее.
Разработанные разными фирмами-изготовителями формы отображения данных на дисплее для вождения судна отличаются друг от друга. Для примера на рис. 6.5 представлена одна из форм отображения информации для процессов швартовки.
Форма отображения данных для швартовки содержит:
Дату и время; Координаты и их датум; Курс и путевой угол; Лаговую и путевую скорость; Скорость поворота; Параметры истинного и кажущегося ветра; Глубину под килем;
Боковые скорости носа и кормы;
Задаваемое и действительное положение руля; Режимы работы ГДУ и подруливающих устройств; Частоту вращения ВРШ, Угол лопастей ВРШ.
Форма отображения данных для перехода не включает скорость носа, кормы, а также схему режимов работы подруливающих устройств и главного двигателя (Справа вверху на рис. 6.5). Вместо этой схемы представляются данные, характеризующие плавание по маршруту:
• Название маршрута, • Пеленг, дистанция точки
• Номер точки предстоящего поворота,
поворота, • Время следования до точки
• Боковое отклонение от линии поворота и прихода в нее, пути, • Курс нового отрезка пути.
|
Рис. 6.6. Форма отображения данных в системе Navy-Conningфирмы «Транзас». |
Формы отображаемых на коннинг дисплее данных ряда ИСМ дополнительно к вышеперечисленным элементам содержат сведения о навигационных огнях. Такую информацию включает, например, коннинг дисплей фирмы «Транзас».
На его экране (рис. 6.6) представляются следующие данные:
1. Элементы ветра; 6. Данные о прохождении
2. Глубина;
3. Сведения об отданных 7. якорях; 8.
4. Навигационные огни; 9.
| маршрута; Время; Координаты судна; Частота вращения винта; Режим ГДУ. |
5. Курс, скорость, положение 10. руля;
7. Система оценки и оптимизации мореходности.
Общие сведения.
|
|
|

Типы оградительных сооружений в морском порту: По расположению оградительных сооружений в плане различают волноломы, обе оконечности...

Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...

Типы сооружений для обработки осадков: Септиками называются сооружения, в которых одновременно происходят осветление сточной жидкости...

Поперечные профили набережных и береговой полосы: На городских территориях берегоукрепление проектируют с учетом технических и экономических требований, но особое значение придают эстетическим...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!