Силы, действующие на шатунные шейки рядных и V-образных двигателей, определяют аналитическим способом или графическим построением.
172
Рядные двигатели. Аналитически результирующая сила, действующая на шатунную шейку рядного двигателя (рис. 8.6, а):
где PI=K+KRm — сила, действующая на шатунную шейку по кривошипу, Н.
Направление результирующей силы для различных положений коленчатого вала определяется углом ф, заключенным между вектором Ршш и осью кривошипа. Угол ф находится из соотношения
Результирующую силу действующую на шатунную шейку, можно получить геометрическим сложением силы Рх, действующей по кривошипу, и тангенциальной силы Т, либо геометрическим сложением суммарной силы S, действующей по шатуну, и центробежной силы вращающихся масс шатуна (см. рис. 8.6, а).
Графическое построение силы R^m в зависимости от угла поворота кривошипа осуществляется в виде полярной диаграммы (рис.
б) с полюсом в точке Ош.,
При рассмотрении силы Лшлп как суммы сил Т и Рк построение полярной диаграммы производится следующим образом (рис.
а).
Из точки Ош полюса диаграммы — по оси абсцисс вправо откладывают положительные сипы Т, а по оси ординат вверх — отрицательные силы Рх. Результирующую силу R„п, для соответствующего угла поворота коленчатого вала определяют графически как геометрическую сумму сил Т и Рх. На рис. 8.7, а дано построение сил JLm для углов <ро=0, (р\ = 30 и <рп=390°. Аналогично строят силы и для других положений коленчатого вала.
дпш=у/т2+Р?,
(8.24)
1ёф=Т/Рх.
(8.25)
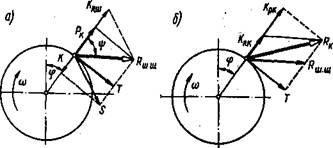
Ряс. 8.6. Силы, действующие на:а — шатунную шейку вала; 6 — колено вала
173
oiizzf
Ряс. 8.7. Построение полярной диаграммы нагрузки на шатунную шейку:

а — построение Rm™ как суммы Т и рх; б — полярная диаграмма;«— построениекак суммы S я Кцш
Для получения полярной диаграммы концы результирующих сил Rmm последовательно в порядке нарастания углов соединяют плавной кривой.
На рис. 8.7, б, в полярная диаграмма нагрузки на шатунную шеку построена геометрическим сложением сил S и КЯш. Различие заключается в построении сил S. На рис. 8.7, б силы S определены геометрическим сложением сил Т и К, т. е. S=y/T2+K2, и показано построение силы S^, соответствующей углу <р13=390° поворота кривошипа. На рис. 8.7, в силы S, предварительно подсчитанные аналитически, непосредственно суммируются с силой
К**-
Построение полярной диаграммы нагрузки на шатунную шейку (рис. 8.7, в) геометрическим сложением суммарной силы S, действующей по оси шатуна, с центробежной силой инерции К^, действующей по кривошипу, осуществляется следующим образом.
Из точки О, представляющей собой центр условно неподвижной коренной шейки, радиусом, равным в принятом масштабе радиусу кривошипа, описывают окружность. Из точки О' — центра шатунной шейки в в.м.т.— проводят вторую окружность радиусом, равным в том же масштабе длине шатуна. Окружность с центром О делят на равное число частей (обычно на 12 или 24). Через точки деления из центра О проводят лучи до пересечения с окружностью, проведенной из точки О'. Эти лучи представляют собой относительные положения оси условно вращающегося цилиндра двигателя. Принято, что цилиндр вращается с угловой скоростью, равной по величине, но противоположной по направлению угловой скорости вращения коленчатого вала. Соединяя точку с концами проведенных лучей, получают отрезки О'Г, О'2" и т. д. Эти отрезки — относительные положения оси шатуна при определенных углах поворота коленчатого вала. Из точки О' по направлениям оси шатуна откладывают в определенном масштабе МР с учетом знаков векторы сил S (на рис. 8.7, в показаны силы Su, при <р13=390° и 52з при <Ргъ = 690°) и концы их соединяют плавной линией. Полученная кривая называется полярной диаграммой сил S с полюсом в точке О'.
Для нахождения результирующей силы 7?тш необходимо переместить полюс О' по вертикали на величину силы (К^ постоянна по величине и направлению), взяв ее в том же масштабе МР. Полученная точка Ош называется полюсом полярной диаграммы результирующих сил Яшш, действующих на шатунную шейку.
Чтобы геометрически сложить векторы сил S и KRm для какоголибо положения кривошипа (например, 23), достаточно провести из полюса Ош вектор Ош23. Этот вектор, являющийся гео-
175
метрической суммой векторов ОшО'=и 0'23=1S23, по величине
и направлению соответствует искомой силе
Таким образом, векторы, Соединяющие начало координат (полюс От) с точками на контуре полярной диаграммы сил S, выражают по величине и направлению сипы, действующие на шатунную шейку при соответствующих углах поворота коленчатого вала.
Для получения результирующей силы Rr=R^^+K»r (см. рис. 8.6, б), действующей на колено вала и изгибающей шатунную шейку, необходимо полюс Ош переместить по вертикали (см. рис. 8.7) на величину центробежной силы инерции вращающихся масс кривошипа Кцк= —mjko7, в точку Ох. На рис. 8.7, б, в показано построение результирующих сил R* для углов <pi3=390°. Аналитически сила (см. рис. 8.7, б)
RI=jT2+K>,(8.26)
где КР1=Рк+Кяк=К+КЯа+Кхк=К+Кл — сила, действующая на колено вала по кривошипу (на рис. 8.7, б показано построение силы Ski прд <р=30°).
Для определения средней результирующей сипы за цикл Динхр,
а также ее максимального R-.— и минимального R~ значений
полярную диаграмму перестраивают в прямоугольные координаты в функции угла поворота коленчатого вала (рис. 8.8). Для этого на оси абсцисс откладывают: для каждого положения коленчатого вала углы поворота кривошипа, а на оси ординат — значения результирующей силы R— взятые из полярной диаграммы. При построении диаграммы все значения RL™ считаются положительными. Среднюю величину результирующей силы Лпив.ер находят путем планиметрирования площади под кривой Rmm=f((p).
Rum

Pic. 8.8. Диаграмма нагрузки на шатунную шейкув прямоугольных координатах
176
V-образяые двигателя. При определении результирующих сил,действующих на шатунную шейку V-образного двигателя, необходимо учитывать конструктивное выполнение соединения шатуновс коленчатым валом.
Для V-образных двигателей с сочлененными шатунами (с шатунной шейкой соединен только один шатун) результирующую сипуR—у. действующую на шатунную шейку, определяют геометрическим сложением суммарных сил Тъ и Рщ, передающихся от левогои правого шатунов (рис. 8.9):
RmjaX ~ л/W+Ph(8-27)
Силы Tz и Р/х определяют табличным способом с учетом порядка работы двигателя
TZ = T„+Tai(8.28)
Pn.=Pui+Pxji=Kll+KgnLII+Ku+KitJILB=Kz+KKBiL. (8.29)
Углы поворота коленчатого вала в V-образных двигателях отсчитывают от положения первого кривошипа, соответствующегов.м.т. в левом цилиндре от носка при правом вращении коленчатоговала.
Если интервалы между рабочими ходами правых и левых цилиндров на различных кривошипах одинаковы, то суммарные силы,определенные для первого кривошипа, могут быть использованыи для других кривошипов.
Для V-образных двигателей с одинаковыми шатунами, расположенными рядом на одной шейке, результирующие сипы Rи
Rдействующие на со-
ответствующие участкишатунной шейки, определяются раздельно так же,как и для однорядного двигателя. Однако для приближенного определениярезультирующей силы 2?ы,
•действующей на коленовала, подсчитывают условную силу R—т. действующую на шатуннуюшейку сдвоенного кривошипного механизма. Силу тт. определяют безучета смещения шатунов

177
аналогично определению этой же силы для двигателя с сочлененными шатунами. В этом случае
Полярные диаграммы нагрузок на шатунную шеку и на колено вала V-образных двигателей строят так же, как и для рядных двигателей.
СИЛЫ, ДЕЙСТВУЮЩИЕ НА КОРЕННЫЕ ШЕЙКИ КОЛЕНЧАТОГО ВАЛА
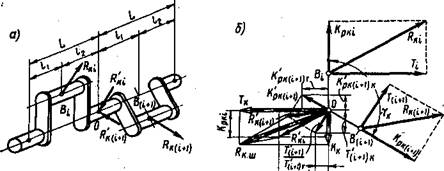
Результирующая сила действующая на коренную шейку (рис. 8.10, а, б), определяется геометрическим сложением сил, равных, но противоположных по направлению силам, передающимся от двух смежных колен:
где Rb= —RkiIiIL и X£(i+i)= —R^+^h/L— соответственно усилия, передаваемые от i и (i+ 1)-го колен на коренную шейку, заключенную между ними; Л и /2 — расстояния по оси вала между центрами коренной и шатунной шеек; L — расстояние между центрами соседних коренных шеек.
При симметричных коленах Л^=— 0,SRIlt— 0,5Лк(/+1),
тогда
Полярную диаграмму сил i?Ijn строят с помощью двух полярных диаграмм нагрузок на смежные шатунные шейки, полюса О. кото-

(8.30)

(8.30)
Лмп= —0,5 (А^+1)).
(8.31)
Т
Рис. 8.10. Коренная шейка:
а — схема коленчатого вала; 6 — схема сил, действующих на коренную шейку
178
рых совмещены в одной точке (рис. 8.11). Графически точки полярной диаграммы нагрузки на коренную шейку для соответствующих углов поворота вала определяют геометрическим сложением попарно векторов Rx обеих диаграмм, одновременно действующих на колено вала в соответствии с порядком работы цилиндров. Каждый из полученных результирующих векторов представляет собой удвоенную силу RIja с обратным знаком. Соединяя концы результирующих векторов плавной кривой в порядке возрастания углов поворота коленчатого вала, получают полярную диаграмму.
Для определения с помощью этой диаграммы результирующей силы R*л,, приложенной к коренной шейке при данном угле поворота кривошипа /-го цилиндра, необходимо уменьшить в два раза масштаб диаграммы по сравнению с масштабом полярных диаграмм нагрузки на шатунные шейки и принять направление векторов от кривой к полюсу Ох.
На рис. 8.11 показано построение полярной диаграммы нагрузки на вторую коренную шейку однорядного шестицилиндрового четырехтактного двигателя с порядком работы 1 —5—3—6—2—4.
Результирующую силу, действующую на коренную шейку, можно подсчитать аналитически:


где Гк и Кх — соответственно суммы проекций силR^, и Д^+i) на оси ТлКг-
го кривошипа.
Определяют Гх и Кх
следующим образом (см.рис. 8.10, б). Проекции силы Rxi— —0,5ЛЙ на осиТ и К /-го кривошипа будут:

Аналогично проекциисилы.Rj'p+i) на оси Т иК (i+ 1)-го кривошипа
Рис. 8.11. Полярная диаграмма нагрузки на вторую коренную шейку однорядного шесги-

цилиндрового четырехтактного двигателя
179
„ ^j*(/+i)— — 0,5i^,*(i+ j).
Далее определяют проекции ГД.] и A^(i+1} на оси Т и К /-гокривошипа:
T{i+ i)T= ТУ+1 cosy* = — 0,571+1 cosy,;
7(5+1Ж= T,'+l siny*= -0,5ГЖ siny*;
i)r= ~ Kpi(t+1) siny*=0,5А/в((+1) siny*;
(<+1)*=Kpt (<+1) cosy* = — 0,5А?Ж((+1) cosy*,
где у* — угол между кривошипами / и (/+ 1)-го цилиндров.
Суммируя все проекции соответственно на оси Т я К /-го криво-
шипа, получаем:
Тх=Г/ + T(i+ i)r+J^(i+ i)r= —0,5 (T,+ Tt+i cosy, —
-KMi+ Dsiny*);
Kpti+ 7(I+1)JC+— 0,5 (A^arf-I-
+ 7i+1 siny*+KMi+,) cosy*).

При определении Г* и £* для различных углов поворота коленчатого вала удобнее использовать табличную форму (табл. 8.6).
Таблица 8.6
| MS кривошип
| (<+ 1>й хривопшп
| Коренная шейка
|
| &
| hT
v>
o'
1
| -0>5Кр*(
| +
| +
VI
о
1
| £
8
+
V»
О
1
| £
•и
+
V)
О*
1
| +
0
«г»
о*
1
| f
+
0
*
«л
о"
1
| £
8^
+
1
«Л
О*
1
| W
| *К
| гк
| Лк.Ш
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Табл. 8.6 составляют по углу поворота кривошипа первого цилиндра от начала цикла. Углы поворота (р, и <р1+г и соответст-
180
и
О
во т iso ко зоо зво т т~"$к вод ввд»•
Рве 8.12. Диаграмма нагрузки на коренную шейку:а — без учета противовесов; 6 — вал с противовесами
вующие нм силы определяют с учетом углового смещения порядка работы цилиндров. При угле между кривошипами ух=0; 90; 180° ит. д. таблица значительно упрощается (см. табл. 10.6).
По значениям Гк и Лк» взятым для различных углов поворота коленчатого вала, строят полярную диаграмму результирующих сил Дцп, действующих на коренную шейку в координатах Т и К /-го цилиндра. Диаграмма строится аналогично полярной диаграмме нагрузки на шатунную шейку.
Определение результирующих сил действующих на коренные шейки V-образных двигателей, и построение для них полярных диаграмм осуществляют так же, как и для рядных двигателей, но с учетом действия на каждое колено вала суммарных сил от двух цилиндров (см. § 8.6). Перестроение полярной диаграммы сил Rxm (рис. 8.11) в прямоугольные координаты Л1Ш — q> (рис. 8.12, а) и определение по ней ДКЖбр, Липши и RIMпш производится также, как это делалось при перестроении диаграммы сил R—
ДИАГРАММЫ ИЗНОСА ШЕЕК КОЛЕНЧАТОГО ВАЛА
На основании полярных диаграмм нагрузок на шейки коленчатого вала можно построить диаграммы износа шеек. Эти диаграммы дают возможность определить наиболее и наименее нагруженные участки шатунных и коренных шеек, что необходимо для
181
правильного определения местоположения масляного отверстия. Кроме того, они дают наглядное представление о характере износа шейки по всей окружности в предположении, что износ пропорционален усилиям, действующим на шейку.
Диаграмму износа шатунной шейки (рис. 8.13) строят по полярной диаграмме, приведенной на рис. 8.7, б, следующим образом. Проводят окружность, изображенную в произвольном масштабе шатунную шейку; делят ее на равное количество участков лучами Ош1, 0^2 и т. д. (обычно на 12 или 18 участков).
Дальнейшее построение осуществляют в предположении, что действие каждого вектора силы R,—> распространяется на 60° по окружности шейки в обе стороны от точки приложения сипы. Таким образом, для определения величины усилия (износа), действующего по каждому лучу (например, по лучу От22), необходимо:
а)перенести луч с диаграммы износа параллельно самому себе на полярную диаграмму;
б)определить по полярной диаграмме сектор на шатунной шейке (по 60° в каждую сторону от луча От11), в котором действующие силы Ruuns создают нагрузку (износ) по направлению луча Ош11;
в)определить величину каждой силы R—.. действующей в секторе луча От11 (в секторе луча От11 действуют всего три силы: Дшп1з, Дшпм и Долпн)> и подсчитать результирующую величину
RmmZ (7?пт птУ/= Rtn тИ Rm mil ~4~ i?m ml ДЛЯ ЛуЧЯ Ош111
г)отложить результирующую величину На.ши в выбранном масштабе на диаграмме износа по лучу От11 от окружности к
центру;

Рве. 8.13. Диаграмма износа шатуннойшейки
д)таким же образомопределить результирующиевеличины сил, действующихв секторах каждого луча (например, в секторе луча Ош1действуют все силыкроме одной Доли» в в секторах лучей Ош4 и Ош5 нетни одной действующей силы);
е)отложить на каждомлуче отрезки, соответствующие в выбранном масштабе результирующим величинам сил Дплпв, в концы отрезков соединить плавнойкривой, характеризующей износ шейки;
182
ж)перенести на диаграмму износа ограничительные касательные к полярной диаграмме ОтА и ОтВ и, проведя от них лучи ОшА' и OJS под углом 60°, определить граничные точки (А" и В") кривой износа шатунной шейки, между которыми обычно располагается ось масляного отверстия.
Для упрощения подсчета результирующих величин составляют таблицу (см. табл. 10.5), в которую заносят значения сил действующих по каждому лучу, и их сумму.
Диаграмму износа коренной шейки строят аналогично.
Глава 97
УРАВНОВЕШИВАНИЕ ДВИГАТЕЛЕЙ9.1. ОБЩИЕ СВЕДЕНИЯ
Силы и моменты, действующие в кривошипно-шатунном механизме, непрерывно изменяются и, если они не уравновешены, вызывают сотрясение и вибрацию двигателя, передающиеся раме автомобиля или трактора.
К неуравновешенным силам и моментам относятся:
а)силы инерции возвратно-поступательно движущихся масс Pi=Pji+Pju* и центробежные силы инерции вращающихся масс К*,
б)продольные моменты Mj—Mjj+MJU и MR, возникающие в многоцилиндровых двигателях от неуравновешенных сил Р} и Кя отдельных цилиндров;
в)крутящий момент и равный ему, но противоположно направленный опрокидывающий момент Мовр= —М^, воспринимаемый опорами двигателя.
Двигатель считается полностью уравновешенным, если при установившемся режиме работы силы и моменты, действующие на его опоры, постоянны по величине и направлению. Однако поршневые двигатели не могут быть полностью уравновешенными, так как крутящий момент Мщ, всегда является периодической функцией угла поворота коленчатого вала и, следовательно, величина опрокидывающего момента Моар всегда переменна.
Условия уравновешенности двигателя с любым числом цилиндров (при соблюдении равенства масс движущихся частей и идентичности протекания рабочего процесса во всех цилиндрах, а также
♦При уравновешивании двигателей обычно рассматривают силы инерции только первых двух порядков.
183
обеспечении статической и динамической уравновешенности коленчатого вала) принято записывать в следующем виде:
а)результирующие силы инерции первого порядка и их моменты равны нулю:-ХР;/=0 и ХМр=0;
б)результирующие сипы Инерции второго порядка и их моменты равны нулю: 2Р^=0 и 1Мт=0;
в)результирующие центробежные силы инерции и их моменты равны нулю: £.£х=0 и ЕА/х=0.
Таким образом, решение вопроса уравновешивания двигателей сводится к уравновешиванию лишь наиболее значительных сип и их моментов.
Уравновешивание сил инерции первбго и второго порядков достигается подбором определенного числа цилиндров, их расположением и выбором соответствующей кривошипной схемы коленчатого j вала. Так, например, в шестии восьмицилиндровых рядных двигателях полностью уравновешены силы инерции первого и второго порядков и их моменты.
При невозможности подобрать для проектируемого двигателя соответствующего количества и расположения цилиндров для полного уравновешивания сил инерции они могут быть уравновешены противовесами, расположенными на дополнительных.валах, имеющих механическую связь с коленчатым валом.
В рядных двигателях уравновесить сипы инерции первого и второго порядков установкой противовесов на коленчатом валу невозможно. При соответствующем выборе массы противовеса можно частично перенести действие силы инерции первого порядка из одной плоскости в другую, тем самым уменьшив максимальную неуравновешенность в одной плоскости.
Центробежные силы инерции вращающихся масс практически можно уравновесить в двигателе с любым количеством цилиндров установкой противовесов на коленчатом валу.
В большинстве многоцилиндровых двигателей результирующие силы инерции уравновешиваются без установки противовесов за счет соответствующего числа и расположения колен вала. Однако даже уравновешенные валы часто снабжают противовесами в целях уменьшения и более равномерного распределения нагрузки Rim на коренные шейки и подшипники, а также для уменьшения моментов, изгибающих коленчатый вал.
При установке противовесов на продолжении щек коленчатого вала результирующая сила, действующая на коренную шейку:
RSa=Яцп +Rnp,(9.1)
где Ящ, — сила инерции противовеса.
Для получения полярной диаграммы силы Л“£, необходимо полюс Ох полярной диаграммы силы Яхш (см. рис. 8.11) переместить
184
по биссектрисе угла при Лц^=Рц,((+1) между кривошипами на величину Я^Я^+Я^ в масштабе диаграммы. Полученная точка Оцр будет полюсом полярной диаграммы силы R^m.
Снижение средней нагрузки на коренную шейку при установке противовесов показано на развернутой диаграмме результирующих сил, действующих на корённую шейку (см. рис. 8.12, б).
Одноцилиндровый двигатель. В одноцилиндровом двигателе неуравновешенными силами являются Яр, Ppi и KR. Неуравновешенных моментов нет, т. е. ЛМр= 0; ’LMJII=0 и ЛМЯ=0.
Для уравновешивания центробежной силы инерции вращающихся масс KR (рис. 9.1) на продолжении щек устанавливают два одинаковых противовеса, центры тяжести которых расположены на расстоянии р от оси коленчатого вала.
Полное уравновешивание силы Кл достигается при условии 2тргЯр(о2=тяЯсо2 за счет подбораи р.
Силы инерции первого Pfi и второго Pja порядков не могут полностью уравновешиваться противовесами на продолжении щек коленчатого вала. С помощью таких противовесов возможен только частичный перенос сил инерции Ру из вертикальной в горизонтальную плоскость. Обычно тагам способом уравновешивается 0,5Pji (рис. 9.2). Как видно из рисунка, вертикальная составляющая силы инерции противовеса R^y уменьшает сипу Рр, но в двигателе возникает дополнительная горизонтальная сила Rnр*.
9.2. УРАВНОВЕШИВАНИЕ ДВИГАТЕЛЕЙ РАЗЛИЧНОГО ТИПА

Рве. 9.1. Схема уравновешивания центробежных сил инерции в одноцилиндровом двигателе
Рис. 9.2. Схема переноса действия силыинерции первого порядка одноцилиндрового двигателя из вертикальной в горизонтальную плоскость
185
Масса противовесов (кг)
2m4)^=0,5/w>R/p.
(9.2)
Таким образом, общая масса каждого противовеса в одноцилиндровом двигателе будет
Для полного уравновешивания сил инерции первого порядка Pjj необходимо установить два противовеса на двух дополнительных валах с центрами ОтЛ и (рис. 9.3), расположенных параллельно оси коленчатого вала и симметрично относительно оси цилиндров. Привод этих валов, осуществляемый от коленчатого вала, должен обеспечить их вращение в разные стороны с угловой частотой, равной угловой частоте вращения коленчатого вала. Противовесы расположены на этих валах так, чтобы они при вращении всегда составляли с осью цилиндра угол <р, равный углу поворота колена вала. Масса каждого противовеса должна создавать центробежную силу R^, равную половине значения Pfi и направленную в противоположную сторону. При этом горизонтальные составляющие сил инерции противовесов РЛйд всегда уравновешены, так как они равны по величине и противоположны по направлению.
Равнодействующая вертикальных составляющих сил инерции противовесов 2R„rJI„=2m.rfp.Pj,co2 cos<р расположена на оси цилиндров, а сила инерции возвратно-поступательно движущихся масс Pji= —mjRco2co&q> (см. формулу (8.6)] также действует по оси цилиндров. Следовательно, при pVfl=R сила Рд=2RnpfilK полностью уравновешена.
Уравновешивание силы инерции второго порядка Pja осуществляется аналогичным способом за счет установки еще двух противовесов на двух других валах с центрами <9лдП и 0'vja (см. рис. 9.3). Эти валы расположены аналогично первым, но вращаются с удвоенной угловой частотой коленчатого вала. Противовесы установлены так, что при вращении всегда составляют с вертикальной осью угол 2<р. Взаимное уравновешивание горизонтальных составляющих сил инерции противовесов и уравновешивание вертикальными составляющими Rvjnv сил инерции возвратно-поступательно движущихся масс Pja достигается при условиях:

2р
(9.3)
Я R
"Vjn = Щ
8 Рлд/П
(9.2)
186
Рас. 93. Уравновешивание сил инерции в одноцилиндровом двигателе с помощьюдополнительных валов с противовесами
Р прЦ
 и
и
2RvJn.=hru^p^jn (2со)2 cos 2 q>=mJRG)1XcQS 2 q>=PM.(9.3)
Уравновешивание одноцилиндровых двигателей с помощью установки дополнительных валов с противовесами осуществляется лишь для проведения исследовательских работ и в учебных целях. Практическое применение такое уравновешивание находит при создании тракторных 4-х цилиндровых двигателей для устранения вибрации, утомляющую водителя. Этот метод уравновешивания находит применение и при создании двигателей для высококомфортных легковых автомобилей.
Двухцилиндровые двигатели. Двухцилиндровый рядный двигатель с кривошипами, направленными в одну сторону (рис. 9.4). Порядок работы двигателя 1 — 2. Промежутки между вспышками равны 360°. Коленчатый вал двигателя имеет кривошипы, направленные в одну сторону.
При принятой схеме расположения кривошипов для каждого цилиндра будут одинаковыми силы PJIt Рщ и Кя. Равнодействующие этих сил первого и второго цилиндров соответственно:
2Pji=2Pfl=2mjRa)2 coscp-, ^Pja—XPja=2mjRoj2kcos 2<p;
XKR=2KR=2mRRco2.
Неуравновешенных моментов нет, так как действующие силы и плечи приложения этих сил одинаковы: Т.Мн= 0; ХМт= 0 и 2Ж*=0.
Уравновешивание двухцилиндрового двигателя осуществляется тем $се способом, что и одноцилиндрового.
Двухцилиндровый двигатель с кривошипами под углом 180° (рис. 9.5). Порядок работы двигателя 1 — 2. Промежутки между вспышками чередуются через 180 и 540°.
При принятой схеме расположения кривошипов силы инерции первого порядка при любом положении коленчатого вала уравновешиваются: T,Pji=Q.
В плоскости осей цилиндров эти силы создают неуравновешенную пару с моментом
2Мд=Рда,
где а — расстояние между осями цилиндров.
С помощью противовесов, масса которых
mBSj=mfRal(pjb),
можно перенести действие момента ZA/д в горизонтальную плоскость ф — расстояние между противовесами).
188
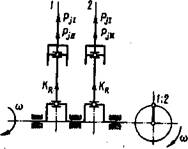


Рис. 9.4. Схема сил инерция, действующих в двухцилиндровом рядном двигателе с кривошипами, направленнымив одну сторону
Рис. 9.5. Схема сил инерции, действующих в двухцилиндровом рядном двигателе с кривошипами под углом 180°
Таким образом, установка противовеса не уравновешивает момента сил инерции первого порядка, а перемещает его из вертикальной плоскости в горизонтальную.
Силы инерции второго порядка Рщ для первого и второго цилиндров равны и одинаково направлены. Равнодействующая этих сил
2Р>П=2mjR(o2X cos 2<р.
Уравновешивания силы Рщ можно добиться противовесами, установленными на дополнительных валах. Момент от сил инерции второго порядка равен нулю: ЪМщ= 0. Центробежные силы инерции от первого и второго цилиндров взаимно уравновешиваются: 2Я:Л=0.
Возникающий от действия центробежных сил инерции свободный момент T,MR=KRa. Уравновешивание этого момента осуществляется противовесами, масса которых
Шарл=mRRa/ (fiRb).
Двухцилиндровый V-образный двигатель с углом развала 90°.
Коленчатый вал двигателя имеет одну шатунную шейку, на которой крепятся шатуны обоих цилиндров (вильчатое соединение), расположенных в одной плоскости (рис. 9.6). Промежутки между вспышками V-образного 4-х тактного двигателя с углом развала 90° составляют 450° и 270°.
189
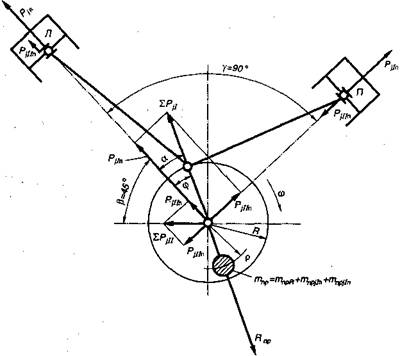
Рис. 9.6. Схема уравновешивания двухцилиндрового V-образного двигателя с углом
развала у*»90°
При принятой схеме расположения цилиндров и общим кривошипом силы Pji, Pju и Кл для каждого цилиндра одинаковы. Равнодействующие сил левого и правого цилиндров составят:
ZP/I л/Pfu+Pjia=(rtijiRco2 cos <р)2+[mflRco2 cos (90 <р)]2 =тппЯоз1\
ZPyn=л/Pfsia+Pfiiu=у/(mjnRjco2 cos 2<р)2+(ЩиКсо2Х cos 2<р)== — -у/2 m>nP<o2A cos 2<р;
ЕйГЛ=тдпЛш2+тй,Ао>2 =mRRca2.
Равнодействующая сила инерции первого порядка 2Р^ постоянна по величине и всегда действует по радиусу кривошипа, так как угол а между направлением %РЛп и осью левого цилиндра всегда равен углу (р поворота кривошипа (cosa=Р;1л/1Рд=
190
=mnRco2 cosq>/(mjiRo)2)=cosa). Следовательно, эта сила может бытьполностью уравновешена противовесами, установленными на продолжении щек коленчатого вала. Масса каждого противовесаm^i=m7i^/(2pvA)-
Центробежная сила ZAT* также уравновешивается двумя противовесами, размещенными на продолжении щек коленчатого вала.Масса каждого противовеса должна быть тяря=тлЛ1(2р^. Общаямасса каждого противовеса, уравновешивающая массы сил ЕРди ХКк, с учетом равенства pvjt и рщК составит тпр=тщ^+т19Я.
Равнодействующая сил инерции второго порядка ЪРщ всегдадействует в горизонтальном направлении, а ее величина изменяетсяпо гармоническому закону, так как ее составляющие РуПл и Ртвсегда равны по абсолютной величине, противоположны по знаку и направлены перпендикулярно друг другу (см. рис. 9.6). Не
уравновешенная сила £Руп= — y/l mjaRoj22 cos 2<р может быть уравновешена только при помощи противовесов, расположенных надвух дополнительных валах, вращающихся в разные стороны с угловой частотой, равной угловой частоте вращения коленчатоговала.
Моменты=0; 2А/,п=0; £МЯ=0.
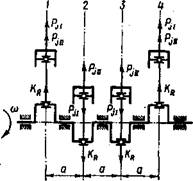
Четырехцилиндровый рядный двигатель с кривошипами, расположенными под углом 180°. Порядок работы двигателя 1 — 2 — 4 — 3или 1 — 3 — 4 — 2. Промежутки между вспышками равны 180°.Коленчатый вал двигателя имеет кривошипы, расположенные подуглом 180°. По такой схеме (рис. 9.7) выполнено большинствочетырехцилиндровых рядных двигателей.
Силы инерции первого порядка и их моменты при указанномрасположении кривошипов взаимно уравновешивается: £Рд=0и ЪМр=0. Силы инерции второго порядка для всех цилиндров
равны и направлены в одну сторону. Их равнодействующая
2Р;п = 4Р/п =
=4щЯсо2Х cos 2 q>.
Силы инерции второгопорядка можно уравновесить лишь с помощью дополнительных валов. Суммарный момент Этих силравен нулю: ЪМщ=0. Центробежные силы инерции для всех цилиндров
191
/:«
2;3
Рис. 9.7. Схема сил инерции, действующихв четырехцилиндровом рядном двигателе
равны я направлены попарно в разные стороны. Равнодействующая этих сил и момент равны нулю: £ЙГх=0 и £Л/*=0.
Некоторые двигатели имеют коленчатые валы с противовесами для уменьшения центробежных сип, действующих на коренные подшипники.
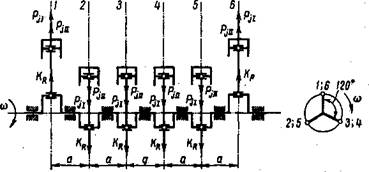
Шестнцнлиндровые двигатели. Однорядный шестицилиндровый двигатель (рис. 9.8). Порядок работы двигателя: 1 — 5 —, 5 — б — 2 — 4 или 1 — 4—2 — 6 — 3 — 5. Промежутки между вспышками равны 120°. Коленчатый вал имеет кривошипы, расположенные под углом 120°.v
Шестицилиндровый рядный двигатель уравновешен полностью:
1Рд=0 и 2МД=0;
1Рд=0 и ~LMja=0;
ХКх=0 и 5ЖХ=0.
Шестицилиндровые рядные двигатели выполняют с семии четырехопорными коленчатыми валами.
На рис. 9.6 показана схема семиопорного коленчатого вала двигателя без противовесов. Некоторые двигатели имеют коленчатые валы с противовесами для разгрузки коренных подшипников от действия центробежных сил.
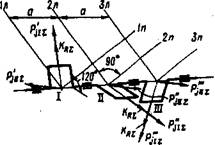
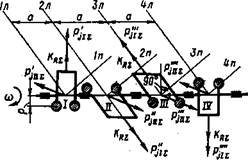
V-образный шестицилиндровый двигатель с углом развала цилиндров 90° и тремя спаренными кривошипами под углом 120° (рис. 9.9). Порядок работы двигателя: 1л — 1п — 2л — 2п — Зл — Зп. Вспышки чередуются через 90 и 150°. Коленчатый вал имеет кривошипы, расположенные под углом 120°.
Для каждой секции двигателя, которая включает два цилиндра (левый и правый), равнодействующая сил инерции первого порядка является постоянной величиной и направлена всегда по радиусу
Рас. 9.8. Схема сил инерции, действующих в шестицилиндровомрядном двигателе
192

Рве. 9.9. Схема сил инерции, действующих в шестицилиндровом V-образном
двигателе
кривошипа. Равнодействующая сил инерции первого порядка для всего двигателя равна нулю: llPjlz=0. Суммарный момент от сил инерции первого порядка действует во вращающейся плоскости, составляющей с плоскостью первого кривошипа угол 30°, и равен
ХМдЕ=ч/3 Рдца= \,132mjRco2a.
Равнодействующие сил инерции второго порядка для каждой секции всегда направлены по, горизонтали перпендикулярно оси коленчатого вала (см. рис. 9.9). Сумма этих равнодействующих сил равна нулю:
ЕРдш=Рда+Рда+Pfa = 0.
Суммарный момент от сил инерции второго порядка действует в горизонтальной плоскости:
ЕА/да=л/Ъп^т2Ха (1,5 cos 2<р+0,866 sin 2<р).
Центробежные силы инерции взаимно уравновешиваются: Е£*=0.
Суммарный момент от центробежных сил действует в одной плоскости с моментом EM>ffi:
2Мга=^/Зй:ЛЕа=1,732(шх+2»1шл)Лш2а.
Уравновешивание моментов ЕМда и ЪМю. осуществляется с помощью противовесов, устванавливаемых на продолжении щек коленчатого вала, а момента— установкой противовесов на
двух дополнительных валах.
V-образный шестицилиндровый двигатель с углом развала цилиндров 60° и шестью кривошипами под углом
193
7 Я-205
60° (рис. 9.10). Порядок работы двигателя: 1л — 1п — 2л— 2п — Зл — Зп. Чередование вспышек равномерное через 120°.
Длякаждой секции двигателя, которая включает два цилиндра (левый и правый), равнодействующие сил инерции первого и второго порядков постоянны по величине, а равнодействующие сил инерции первого и второго порядков для всего двигателя равны нулю: 0 и ЪРр1—0. Равнодействующая центробежных сил также равна нулю: £ЙГХ=0.
Суммарный момент от сил инерции первого порядка действует во вращающейся плоскости, совпадающей с плоскостью первого левого и третьего правого кривошипов:
Суммарный момент от сил инерции второго порядка действует в плоскости, вращающейся с угловой скоростью 2со в сторону, противоположную вращению коленчатого вала:
Суммарный момент от центробежных сил действует в одной плоскости с моментом 'LMjf.
Уравновешивание моментов 'EM# и 2,МХ осуществляется с помощью противовесов, устанавливаемых на продолжении двух крайних щек коленчатого вала, а момента ЪМщ — путем постановки противовесов на дополнительном валу, вращающемся со скоростью 2со.
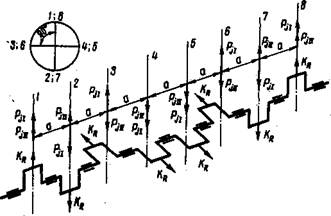
Восьмицилиндровые двигатели. Восьмицилиндровый рядный двигатель (рис. 9.11). Порядок работы двигателя 1 — б —
ХМд= l,5mjRco2a.
£ А/умтт = 1,5щИсо2Ха.
ЪМл=тлХсо2[(2а+Ь)+1,732 (о-*)].

Ршс. 9.11. Схема сил инерции, действующих в восьмицилиндровомрядном двигателе
2 — 5 — 8 — 3 — 7 — 4. Промежутки между вспышками равны 90°. Коленчатый вал имеет восемь кривошипов, которые расположены в двух взаимно перпендикулярных плоскостях.
Двигатель полностью уравновешен:
и £A/fi=0i 2Р)ц=0 и ЪКл=0 и 1,МЛ=0.
Для разгрузки коленчатого вала от действия местных центробежных сил в некоторых двигателях применяют противовесы.
Восьмицлиндровый V-образный двигатель. Порядок работы двигателя: 1л — 1п — 4л — 2л — 2п — Зл — Зп — 4п. Промежутки между вспышками равны 90°. Угол развала цилиндров у—90°. Коленчатый вал имеет кривошипы, расположенные в двух взаимно перпендикулярных плоскостях (рис. 9.12).
В двигателях рассматриваемого типа силы инерции первого порядка взаимно уравновешиваются: 2Р^=0. Суммарный момент этих сил действует во вращающейся' плоскости, составляющей с плоскостью первого кривошипа угол 18°26':
ЪМд=-у/10 mjR(o2a.
Равнодействующие сил инерции второго порядка для каждой секции двигателя всегда направлены по горизонтали перпендикулярно оси коленчатого вала (рис. 9.12). Сумма этих равнодействующих сил равна нулю: ЪРщ—0.
Суммарный момент сил инерции второго порядка также равен нулю: £Л/д г=0. Центробежные силы инерции для всех секций равны
195

Ряс. 9.12. Схема сел инерции, действующих в восьмицилиндровом V-образном
двигателе
и направлены попарно в разные стороны. Равнодействующая этих сил
Суммарный момент ЪМ* центробежных сил действует в той же плоскости, что и равнодействующий момент сил инерции первого порядка 'LMjf.f
ZA/*=-y/lO Kga=л/Го (тх+2mms)Rcoza.
Уравновешивание моментов и ЪМЛ осуществляется противовесами, устанавливаемыми на продолжении щек вала (рис. 9.12) или путем установки двух противовесов на концах коленчатого вала в плоскости действия моментов, т. е. под углом 18°26' (см. рис. 10.15).
Очевидно, что
2.М#+ЕЛ/Л=aRco2 i/To (mJ+mx+
Масса каждого общего противовеса, установленного на конце вала:
/ИпрЕ — aR л/lO {ntj+/и*+Ъпш^КрЬ),
где р — расстояние от центра тяжести общего противовеса до оси коленчатого вала; Ъ — расстояние между центрами тяжести противовесов.
93. РАВНОМЕРНОСТЬ КРУТЯЩЕГО МОМЕНТА И РАВНОМЕРНОСТЬ
ХОДА ДВИГАТЕЛЯ
При определении суммарных сил, действующих в двигателе, было установлено, что крутящий момент представляет собой периодическую функцию угла поворота коленчатого вала. Нерав196
номерност






