

История развития пистолетов-пулеметов: Предпосылкой для возникновения пистолетов-пулеметов послужила давняя тенденция тяготения винтовок...

Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
История развития пистолетов-пулеметов: Предпосылкой для возникновения пистолетов-пулеметов послужила давняя тенденция тяготения винтовок...
Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
Топ:
Процедура выполнения команд. Рабочий цикл процессора: Функционирование процессора в основном состоит из повторяющихся рабочих циклов, каждый из которых соответствует...
Когда производится ограждение поезда, остановившегося на перегоне: Во всех случаях немедленно должно быть ограждено место препятствия для движения поездов на смежном пути двухпутного...
Интересное:
Как мы говорим и как мы слушаем: общение можно сравнить с огромным зонтиком, под которым скрыто все...
Распространение рака на другие отдаленные от желудка органы: Характерных симптомов рака желудка не существует. Выраженные симптомы появляются, когда опухоль...
Подходы к решению темы фильма: Существует три основных типа исторического фильма, имеющих между собой много общего...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
Определение места судна с помощью РЛС
Опознавание береговой черты
Судовая РЛС применяется главным образом для определения места судна по измеренным до ориентиров расстояниям. При наличии точечных или имеющих характерные очертания ориентиров можно для этого использовать и радиолокационные пеленги (РЛП).
Реализация определения места судна с помощью РЛС зависит и от того, как точно опознаны те ориентиры, по которым производятся замеры расстояний (DР) и пеленгов (РЛП).
При подходе к берегу с моря возникает задача опознавания района нахождения судна. Основными признаками для опознавания берега является конфигурация береговой черты, отдельно лежащие в море скалы, островки и т.п.
Опознавание береговых объектов для последующего определения места судна может производиться или способом веера пеленгов и расстояний, или способом траверзных расстояний.
Способ веера пеленгов и расстояний.
Этот способ обычно применяется при изрезанном обрывистом береге или в том случае, когда на берегу (или в море) имеются характерные ориентиры.
Сущность способа состоит в следующем (рис. 1):
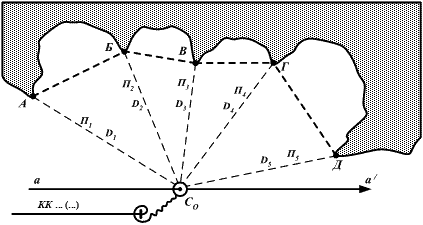
Рис. 1. Способ веера пеленгов и расстояний
На экране ИКО РЛС подбираются хорошо видимые и характерные объекты. Затем в быстрой последовательности измеряются РЛП и DР до этих объектов (Ор. А – РЛП1, DР1; Ор. Б – РЛП2, DР2; Ор. В – РЛП3, DР3; Ор. Г – РЛП4, DР4; Ор. Д – РЛП5, DР5). На момент средних наблюдений (Ор. В) замечается  .
.
На листе кальки проводится прямая а–а′ и на ней из произвольной точки (т. С0) прокладываются истинные значения (Пi = РЛПi + Δ К, Di = DРi + Δ DP) всех измеренных пеленгов и расстояний в масштабе путевой навигационной карты.
Соединив штриховой линией (– – –)точки пеленгов, соответствующих измеренным (и исправленным) расстояниям, получаем ломаную линию, которая и будет приближенным изображением контура берега.
|
|
Подготовленную таким образом кальку перемещают по путевой карте так, чтобы линия а–а′ всегда оставалась параллельной курсу судна, а ломаная (штриховая) линия в наибольшей степени совпадала бы с изображением берега на карте и чтобы большее число П и D соответствовало характерным ориентирам на берегу, и если так, то это значит, что участок побережья опознан. В т. С0 кальки делается укол циркулем-измерителем и эта точка (т. С0), но уже на путевой навигационной карте, считается ориентировочным местом судна на средний момент наблюдений.
Если скорость судна при измерении радиолокационных пеленгов (РЛП) и расстояний (DР) более 12 узлов, то время и отсчет лага  замечаются при каждом измерении РЛП и DР и прокладка их на кальке производится не из одной точки (т. С0), а из точек, соответствующих месту судна в момент каждого измерения. В дальнейшем – аналогично до укола циркулем-измерителем в точке, соответствующей последнему измерению РЛП и DР.
замечаются при каждом измерении РЛП и DР и прокладка их на кальке производится не из одной точки (т. С0), а из точек, соответствующих месту судна в момент каждого измерения. В дальнейшем – аналогично до укола циркулем-измерителем в точке, соответствующей последнему измерению РЛП и DР.
Место судна этим способом опознается тем точнее, чем больше взято пеленгов и расстояний и чем характернее выражены контуры наблюдаемых ориентиров.
2. Способ траверзных расстояний (рис. 2).
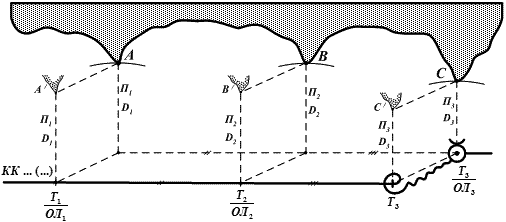
Рис. 21.2. Способ траверзных расстояний
Наблюдатель измеряет расстояния до береговых ориентиров, эхо-сигналы которых видны на экране, когда они приходят на один и тот же курсовой угол, лучше всего на траверз, и в момент измерения расстояний замечает время и отсчет лага . Затем на листе кальки прокладывает линию курса со счислимыми точками каждого измерения  . Из соответствующих точек по КУ и D наносит объекты (А′, В′, С′). Подготовленную таким образом кальку накладывает на путевую навигационную карту и перемещает ее так, как и при первом способе. В результате совпадения ориентиров на кальке и карте наблюдатель получает уточненное положение линии пути и места судна.
. Из соответствующих точек по КУ и D наносит объекты (А′, В′, С′). Подготовленную таким образом кальку накладывает на путевую навигационную карту и перемещает ее так, как и при первом способе. В результате совпадения ориентиров на кальке и карте наблюдатель получает уточненное положение линии пути и места судна.
|
|
Определение места судна по расстояниям до нескольких ориентиров
1. Расстояния измеряются до точечных ориентиров (рис. 3).
Рис. 3. Определение места судна по расстояниям до нескольких точечных ориентиров
Наблюдатель последовательно измеряет расстояния до нескольких ориентиров (А, В, С) с помощью подвижного кольца дальности (ПКД) РЛС (ПКД совмещают с той частью изображения, которая больше всего выступает в сторону судна).
Вначале измеряют DР до ориентиров близких к траверзу судна; в последнюю очередь – до находящихся на острых или тупых курсовых углах (ор. С).
Если скорость хода судна более 12 узлов, измерения следует приводить к одному месту (последнему замеру DР). По исправленным значениям расстояний (D = DР + Δ DР) определяем на путевой навигационной карте обсервованное место судна, как точку пересечения дуг окружностей, проведенных от мест ориентиров, радиусами R = D (DA, DB, DC).
2. Расстояния измеряются до участка береговой черты с плавными очертаниями и «точечного» ориентира (рис. 4).
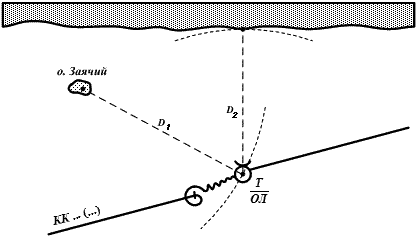
Рис.4. Определение места судна по расстояниям до ориентиров
От точечного ориентира радиусом, равным измеренному и исправленному расстоянию до него проводят дугу окружности и на ней ищут место, откуда дуга, проведенная радиусом, соответствующим второму измеренному и исправленному расстоянию, касалась бы плавной береговой черты.
Положение острия циркуля будет соответствовать обсервованному месту судна.
3. Расстояния измеряются до участков береговой черты с плавными очертаниями (рис. 21.5).
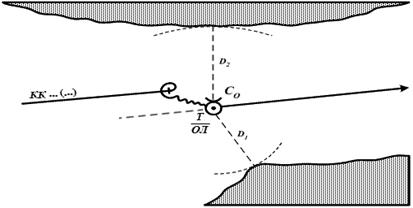
Рис.5. Определение места судна по расстояниям
В этом случае нужно измерять расстояния DP1 и DP2 до ближайших к судну точек береговой черты.
Затем на кальку наносят линию курса судна и из какой-либо точки этой линии (т. С0) проводят дуги окружностей радиусами, равными измеренным и исправленным расстояниям D1 = DP1 + Δ DP и D2 = DP2 + Δ DP.
Дуги проводят примерно в районе тех курсовых углов (КУ), на которых были измерены эти расстояния. Кальку накладывают на карту так, чтобы общий центр дуг находился примерно в районе счислимого места. Передвигая кальку по путевой навигационной карте, находят такое ее положение, при котором дуги коснутся обоих участков берега (рис. 21.5).
Положение центра дуг в этот момент и определит обсервованное место судна.
|
|
Если участки береговой черты параллельны, место судна определить таким образом нельзя.
Если при измерении DP1 и DP2 измерялись и РЛП1, РЛП2, можно обойтись и без кальки.
Определение места судна по радиолокационному пеленгу
и расстоянию до одного ориентира (рис. 6)
Рис. 6. Определение места судна по пеленгу и расстоянию до одного ориентира
Этот способ применяется тогда, когда на экране ИКО РЛС виден только один хорошо различимый, лучше всего точечный, ориентир.
Обсервованное место получают на линии пеленга на измеренном и исправленном расстоянии до ориентира.
При прокладке линии пеленга не следует забывать исправлять его значение поправкой курса (Δ К + РЛП = ИП), а измеренное расстояние DP исправлять поправкой измерения дистанции (Δ DP).
ИП = РЛП + Δ К
D = DP + Δ DP
|
|
|

Историки об Елизавете Петровне: Елизавета попала между двумя встречными культурными течениями, воспитывалась среди новых европейских веяний и преданий...

Состав сооружений: решетки и песколовки: Решетки – это первое устройство в схеме очистных сооружений. Они представляют...

Эмиссия газов от очистных сооружений канализации: В последние годы внимание мирового сообщества сосредоточено на экологических проблемах...

Типы сооружений для обработки осадков: Септиками называются сооружения, в которых одновременно происходят осветление сточной жидкости...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!