Содержание
Раздел 1. Основные понятия и законы электромеханики……………………..5
§1.Основные определения…………………………………………………..5
§2. Основные понятия и законы электромеханики…….…………………6
Раздел 2. Машины постоянного тока………………………………..…………12
Глава 1. Устройство и принцип действия машин постоянного тока…...........12
§1. Устройство простейшей машины постоянного тока………………...12
§2. Принцип действия генератора постоянного тока…………………….13
§3. Принцип действия двигателя постоянного тока……………………..16
§4. Принцип обратимости электрических машин……….……………….17
§5. Устройство машины постоянного тока……………………………….18
§6. Якорные обмотки машин постоянного тока………………………….20
Глава 2. Общие вопросы теории машин постоянного тока…………………..24
§1. ЭДС обмотки якоря и электромагнитный момент…………………...24
§2. Электромагнитные нагрузки и машинная постоянная………………25
§3. Магнитное поле машины в режиме холостого хода…………………26
§4. Реакция якоря в машинах постоянного тока…………………………28
§5. Потери в электрических машинах…………………………………….29
§6. Коэффициент полезного действия……………………………………30
Глава 3. Генераторы постоянного тока………………………………………..31
§1. Общие сведения о генераторах постоянного тока…………………..31
§2. Генераторы независимого возбуждения……………………………..32
§3. Генераторы параллельного возбуждения……………………………..36
§4. Генераторы последовательного возбуждения………………………..39
§5. Генераторы смешанного возбуждения………………………………..40
Глава 4. Двигатели постоянного тока………………………………………..41
§1. Общие сведения о двигателях…………………………………………41
§2. Пуск двигателей постоянного тока……………………………………43
§3. Регулирование скорости вращения двигателей постоянного тока….46
§4. Двигатели параллельного возбуждения………………………………47
§5. Двигатели последовательного возбуждения…………………………49
§6. Двигатели смешанного возбуждения…………………………………52
Раздел 3. Машины переменного тока…………………………………………..53
Глава 1. Основные виды машин переменного тока их устройство и
принцип действия……………………………………………………….…53
§1. Общие сведения о машинах переменного тока………………………53
§2. Вращающееся магнитное поле………………………………………..54
§3. Устройство асинхронных двигателей………………………………...58
§4. Принцип действия асинхронного двигателя…………………………60
§5. Устройство синхронных машин………………………………………61
§6. Принцип действия синхронного генератора…………………………65
§7. Принцип действия синхронного двигателя…………………………..66
Раздел 4.Синхронные электрические машины………………………………...66
Глава 1. Синхронные генераторы……………………………………………....66
§1. Холостой ход синхронного генератора……….………………………66
§2. Реакция якоря (статора) синхронного генератора…………...………68
§3. Уравнения и векторные диаграммы синхронного генератора……...71
§4. Характеристики синхронных генераторов…………………………...72
§5. Включение синхронного генератора на параллельную работу
с сетью…………………………………………………………………..75
§6. Синхронные режимы параллельной работы синхронных машин….76
§7. Потери и КПД синхронного генератора……………………………...78
§8. Электромагнитные мощность и момент……………………...………81
§9. Угловые характеристики синхронной машины. Статическая
устойчивость……………………………………………………………83
§10.  -образные характеристики синхронной машины……………85
-образные характеристики синхронной машины……………85
Глава 2. Синхронные двигатели………………………………………………86
§1. Энергетическая и векторная диаграммы синхронного двигателя…..86
§2. Угловые,  -образные и рабочие характеристики синхронного
-образные и рабочие характеристики синхронного
двигателя………………………………………………………………..88
§3. Особенности работы и пуска синхронных двигателей………………91
Рекомендуемая литература……………………………………………………...94
Раздел 1. Основные понятия и законы электромеханики
§1.Основные определения
Электрические машины (ЭМ) – это устройства, предназначенные для преобразования электрической энергии в механическую, механической энергии в электрическую или электрической энергии одного вида в электрическую энергию другого вида, причём это преобразования происходят посредством электромагнитного поля.
Все ЭМ являются преобразователями одного вида энергии в другой, и они обратимы, т.е. могут работать в двух режимах, в режиме двигателя и в режиме генератора.
В ЭМ взаимодействие между отдельными частями машины и преобразование энергии происходит через магнитное поле, существующее в среде, которая заполняет пространство между взаимодействующими частями машины. Этой средой обычно является воздух или другое вещество с заданными магнитными свойствами. Причем количество энергии в единицы объема пропорционально магнитной проницаемости среды. Для получения по возможности более сильных магнитных полей и предания им необходимой конфигурации в электрических машинах применяются ферромагнитные сердечники.
Преобразование энергии в машинах неизбежно связано с ее потерями, вызванных перемагничиванием ферромагнитных сердечников, прохождением тока через проводники, трением в подшипниках и.т.п. Поэтому потребляемая ЭМ мощность всегда больше отдаваемой, или полезной, мощности, а коэффициент полезного действия (КПД) меньше 100%. Тем не менее, ЭМ по сравнению с другими типами преобразователей энергии являются весьма совершенными, с относительно большим КПД.
Теряемая энергия превращается в тепло и вызывает нагревание основных частей машины. Для надёжной работы и достаточного срока службы нагрев ЭМ должен быть ограничен, следовательно, и мощность которую можно получить от машины тоже должна быть ограничена.
Номинальная мощность ЭМ – это такая полезная мощность ЭМ, при которой она может работать в необходимом режиме, не перегреваясь сверх установленной температуры.
В настоящее время выпускают электрические машины для трех основных режимов работы: продолжительного, кратковременного и повторно-кратковременного режимов работы.
Номинальная мощность машины зависит от:
- технических характеристик электрических, магнитных и изоляционных материалов;
- режима работы;
- системы охлаждения (вентиляции), т.е. от конструкции машины;
- электромагнитных нагрузок (величины магнитного поля и силы тока, протекающего по обмоткам машины).
Параметры ЭМ, характеризующие ее работу при номинальной мощности  , также называются номинальными: номинальное напряжение
, также называются номинальными: номинальное напряжение  , номинальный ток
, номинальный ток  , номинальная скорость вращения
, номинальная скорость вращения  , номинальный КПД
, номинальный КПД  , номинальная частота напряжения и тока
, номинальная частота напряжения и тока  , номинальный коэффициент мощности
, номинальный коэффициент мощности  .
.
В зависимости от величины номинальной мощности электрические машины подразделяют (очень условно) на:
- ЭМ малой мощности -  до 0,5 кВт;
до 0,5 кВт;
- ЭМ средней мощности -  от 0,5 до 50 кВт;
от 0,5 до 50 кВт;
- ЭМ большой мощности -  от 50 до 250 кВт;
от 50 до 250 кВт;
- крупные ЭМ - от 250кВт и выше.
В настоящее время выпускаются машины до 1200000 кВт.
Номинальные напряжения у ЭМ находятся в пределах от десятых долей вольта, у ЭМ малой мощности, и до 24 -26кВ у крупных электрических машин.
Электрические машины отличаются высоким коэффициентом полезного действия: у ЭМ малой мощности КПД  40 - 50%, у самых мощных он достигает 98 – 99%.
40 - 50%, у самых мощных он достигает 98 – 99%.
Основные понятия и законы электромеханики
IV. Законы электромеханики.
1.Закон Ампера или закон взаимодействия проводника с током и магнитного поля.
На проводник с током, помещенный в однородное магнитное поле, перпендикулярно магнитным силовым линиям, действует электромагнитная сила, величина которой пропорциональна индукции магнитного поля, силе тока, протекающего по проводнику, и длине проводника, рис.8:
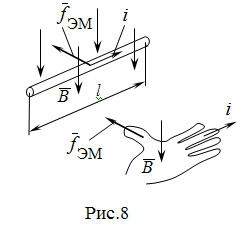
где  - сила, действующая на проводник с током
- сила, действующая на проводник с током  , длиной
, длиной  .
.
Направление действия силы определяется правилом «левой руки»: если расположить ладонь левой руки перпендикулярно магнитным линиям так, чтобы магнитные линии входили в ладонь, а вытянутые пальцы ладони направить по направлению тока, то отставленный в сторону большой палец укажет направление силы, действующей на проводник.
Общие сведения о двигателях
Двигатели постоянного тока находят широкое применение в промышленных, транспортных и других установках, где требуется широкое и плавное регулирование скорости вращения.
По способу возбуждения двигатели постоянного тока делятся аналогично генераторам на двигатели независимого, параллельного, последовательного и смешанного возбуждения. Схемы двигателей и генераторов с данным способом возбуждения одинаковы и отличаются только направлением тока в обмотке якоря. По своим свойствам двигатели независимого и параллельного возбуждения почти одинаковы. Однако двигатели независимого возбуждения требуют отдельного источника постоянного тока для питания обмотки возбуждения, что не экономично, поэтому в дальнейшем они не рассматриваются.
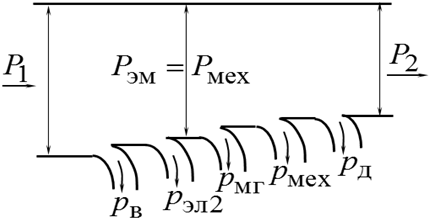
Рассмотрим энергетический процесс преобразования электрической мощности в механическую, на примере двигателя параллельного возбуждения. Пусть двигатель работает в установившемся режиме при  и напряжении на зажимах двигателя
и напряжении на зажимах двигателя  . Если Р 1 - полная электрическая мощность, подводимая к двигателю из сети,
. Если Р 1 - полная электрическая мощность, подводимая к двигателю из сети,  - ток в обмотке якоря и
- ток в обмотке якоря и  - ток возбуждения, то
- ток возбуждения, то
 .
.
Часть этой мощности тратится на покрытие электрических потерь в цепи обмотки возбуждения  и в цепи обмотки якоря
и в цепи обмотки якоря  . Остальная часть мощности прообразовывается в электромагнитную мощность,
. Остальная часть мощности прообразовывается в электромагнитную мощность,  , которая, в свою очередь, преобразовывается в полную механическую мощность вращающегося якоря
, которая, в свою очередь, преобразовывается в полную механическую мощность вращающегося якоря  .
.
Полезная механическая мощность  отдаваемая двигателем, меньше мощности
отдаваемая двигателем, меньше мощности  на величину мощности холостого хода, необходимой для покрытия потерь в стали якоря
на величину мощности холостого хода, необходимой для покрытия потерь в стали якоря  , механических
, механических  и добавочных потерь
и добавочных потерь  , то есть
, то есть

Электромагнитный момент двигателя  , который является вращающим, уравновешивает тормозные моменты: момент
, который является вращающим, уравновешивает тормозные моменты: момент  , соответствующий сумме магнитных, механических и добавочных потерям, покрываемых за счет механической мощности;
, соответствующий сумме магнитных, механических и добавочных потерям, покрываемых за счет механической мощности;  - момент нагрузки на валу, создаваемый рабочей машиной или механизмом;
- момент нагрузки на валу, создаваемый рабочей машиной или механизмом;  динамический момент, возникающий при изменении скорости вращения якоря. При этом
динамический момент, возникающий при изменении скорости вращения якоря. При этом
 .
.
Уравнение моментов на валу двигателя:

Обозначив статический момент сопротивления  получим:
получим:
 .
.
При установившемся режиме работы,  поэтому
поэтому  и
и  .
.
Двигатели постоянного тока, также как и двигатели переменного тока, обладают способностью автоматически, без внешнего регулирующего воздействия, приспосабливаться к изменяющимся условиям работы. В этом смысле можно сказать, что электрические двигатели обладают свойством саморегулирования при соблюдении условий их устойчивой работы.
Допустим, что двигатель постоянного тока параллельного возбуждения работает при  и, следовательно,
и, следовательно,  и нагрузочный момент
и нагрузочный момент  , развиваемый рабочей машиной, увеличивается. Тогда
, развиваемый рабочей машиной, увеличивается. Тогда  , возникает
, возникает  и
и  начинает уменьшаться. Тогда уменьшается также
начинает уменьшаться. Тогда уменьшается также  , а
, а  и
и  начнут увеличиваться, причем это будет происходить до тех пор, пока не наступит равновесие моментов и
начнут увеличиваться, причем это будет происходить до тех пор, пока не наступит равновесие моментов и  . Подобным образом изменяется также режим, еслинагрузочный момент уменьшится. Аналогичным образом происходит переход к новому режиму при изменении других внешних условий. Из изложенного следует, что поведение двигателя при установившемся режиме работы и переходах к новому режиму работы определяется уравнениями равновесия моментов и напряжения цепи якоря.
. Подобным образом изменяется также режим, еслинагрузочный момент уменьшится. Аналогичным образом происходит переход к новому режиму при изменении других внешних условий. Из изложенного следует, что поведение двигателя при установившемся режиме работы и переходах к новому режиму работы определяется уравнениями равновесия моментов и напряжения цепи якоря.
Рабочие свойства двигателей анализируются с помощью скоростной механической характеристик.
Скоростная характеристика:  , при
, при  . Уравнение скоростной характеристики можно получить из основного электрического уравнения двигателя:
. Уравнение скоростной характеристики можно получить из основного электрического уравнения двигателя: 

Механическая характеристика:  , при
, при  .
.  . Ее уравнение получим, если в уравнение скоростной характеристики, вместо тока якоря, подставим формулу определяющую его через электромагнитный момент двигателя:
. Ее уравнение получим, если в уравнение скоростной характеристики, вместо тока якоря, подставим формулу определяющую его через электромагнитный момент двигателя:  ;
;  , тогда
, тогда
 .
.
Вид скоростной и механической характеристик зависит от того, как с изменением момента изменяется магнитный поток двигателя и различен для двигателей с различными способами возбуждения.
Двигателей постоянного тока
Способы регулирования скорости вращения двигателей постоянного тока следуют из рассмотрения уравнения:  .
.
Существует три способа регулирования скорости вращения:
1) Наиболее удобным, распространенным и экономичным является способ регулирования скорости вращения путем изменения магнитного потока  , то есть тока возбуждения
, то есть тока возбуждения  . С уменьшением магнитного потока скорость возрастает. Двигатель рассчитывается для работы при номинальном режиме с наибольшим магнитным потоком, т.е. с наименьшей скоростью вращения. Поэтому магнитный поток можно только уменьшать. Следовательно, рассматриваемый способ позволяет регулировать скорость вращения вверх от номинальной. При таком регулировании КПД двигателя остается высоким, так как мала мощность реостатов для регулирования тока возбуждения. Верхний предел регулирования скорости вращения ограничивается механической прочностью машины и условиями работы щеточно-коллекторного узла.
. С уменьшением магнитного потока скорость возрастает. Двигатель рассчитывается для работы при номинальном режиме с наибольшим магнитным потоком, т.е. с наименьшей скоростью вращения. Поэтому магнитный поток можно только уменьшать. Следовательно, рассматриваемый способ позволяет регулировать скорость вращения вверх от номинальной. При таком регулировании КПД двигателя остается высоким, так как мала мощность реостатов для регулирования тока возбуждения. Верхний предел регулирования скорости вращения ограничивается механической прочностью машины и условиями работы щеточно-коллекторного узла.
2) Регулирование скорости вращения включением в цепь якоря регулировочного сопротивления  . В этом случае скорость вращения якоря определяется выражением:
. В этом случае скорость вращения якоря определяется выражением:  . Этот способ позволяет регулировать скорость вращения вниз от номинальной и связан со значительными потерями в регулировочном сопротивлении и существенном понижении КПД двигателя.
. Этот способ позволяет регулировать скорость вращения вниз от номинальной и связан со значительными потерями в регулировочном сопротивлении и существенном понижении КПД двигателя.
3) Регулирование скорости вращения путем регулирования подводимого напряжения  . Так как работа двигателя при напряжении выше номинального недопустимо, то данный способ, позволяет регулировать скорость вращения только вниз от номинальной. КПД остается высоким. Однако в этом случае необходим отдельный источник тока с регулируемым напряжением, что значительно удорожает установку.
. Так как работа двигателя при напряжении выше номинального недопустимо, то данный способ, позволяет регулировать скорость вращения только вниз от номинальной. КПД остается высоким. Однако в этом случае необходим отдельный источник тока с регулируемым напряжением, что значительно удорожает установку.
Необходимо отметить, что регулирование скорости вращения путем изменения тока якоря  невозможно, хотя такая возможность на первый взгляд вытекает из рассмотренного уравнения. Дело в том, что ток якоря является электрической нагрузкой двигателя и его величина определяется моментом сопротивления того механизма, который двигатель приводит во вращение.
невозможно, хотя такая возможность на первый взгляд вытекает из рассмотренного уравнения. Дело в том, что ток якоря является электрической нагрузкой двигателя и его величина определяется моментом сопротивления того механизма, который двигатель приводит во вращение.
Вращающееся магнитное поле
Принцип образования вращающегося магнитного поля в машине переменного тока рассмотрен на примере статора с простейшей обмоткой (рис. 52), в которой каждая фаза состоит из одного витка или двух проводников (первая фаза – проводники А и Х, вторая фаза – проводники В и Y, третья фаза – проводники С и Z).
Проводники каждого витка (фазы) расположены друг от друга на расстоянии полюсного деления
 ,
,
где  диаметр расточки статора, а
диаметр расточки статора, а  число пар полюсов.
число пар полюсов.
На рис. 52 полюсное деление составляет половину окружности. Шаг витка или обмотки  поэтому называют полным (
поэтому называют полным ( ). Двойному полюсному делению
). Двойному полюсному делению  соответствует угол по окружности статора в 360° эл. Начала фаз А, В, С сдвинуты относительно друг друга на 120° эл., что в данном случае составляет треть окружности.
соответствует угол по окружности статора в 360° эл. Начала фаз А, В, С сдвинуты относительно друг друга на 120° эл., что в данном случае составляет треть окружности.
На рис.52 а показаны направления токов в проводниках обмотки статора для момента времени  , когда
, когда  и
и  . Через четверть периода токи изменят фазу на 90°, рис.52 б:
. Через четверть периода токи изменят фазу на 90°, рис.52 б:
 ,
,
где 
 амплитудное значение тока фазы обмотки статора.
амплитудное значение тока фазы обмотки статора.
Токи фаз считаются положительными, когда они в началах фаз (проводники А, В, С) направлены за плоскость рисунка.
Из рис.52  видно, что распределение токов по окружности статора составляет две зоны, каждая величиной
видно, что распределение токов по окружности статора составляет две зоны, каждая величиной  , причем направление токов в этих зонах противоположны.
, причем направление токов в этих зонах противоположны.
Токи проводников обмотки статора двухполюсной машины создают (рис.52) двухполюсный магнитный поток  , проходящий через статор, ротор и воздушный зазор. При изменении фазы токов на 90° кривая распределения токов и магнитный поток поворачиваются в направлении следования фаз на 90°. При изменении фазы токов еще на 90° ось магнитного потока повернется еще на 90°. Таким образом, обмотка статора двухполюсной машины при питании ее трехфазным током создает двухполюсное вращающееся магнитное поле. При этом за период изменения тока поле поворачивается на
, проходящий через статор, ротор и воздушный зазор. При изменении фазы токов на 90° кривая распределения токов и магнитный поток поворачиваются в направлении следования фаз на 90°. При изменении фазы токов еще на 90° ось магнитного потока повернется еще на 90°. Таким образом, обмотка статора двухполюсной машины при питании ее трехфазным током создает двухполюсное вращающееся магнитное поле. При этом за период изменения тока поле поворачивается на  или на 360°.
или на 360°.
Частота вращения магнитного поля
 ,
,
где  частота тока обмотки статора.
частота тока обмотки статора.
Магнитное поле вращается в направлении чередования фаз А, В, С обмотки статора. Для изменения направления вращения поля на обратное достаточно переменить местами на зажимах обмотки статора концы двух проводников, идущих от питающей сети.
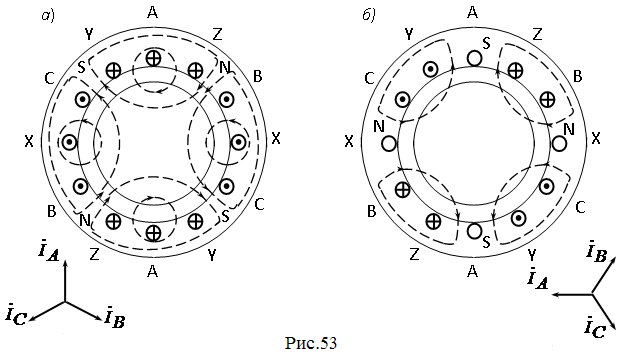
При  полюсное деление составляет четверть окружности и каждая фаза простейшей трехфазной обмотки статора состоит из двух витков с шагом
полюсное деление составляет четверть окружности и каждая фаза простейшей трехфазной обмотки статора состоит из двух витков с шагом  , которые сдвинуты относительно друг друга на
, которые сдвинуты относительно друг друга на  и соединены последовательно или параллельно. Отдельные фазы и их начала А, В, С при этом также сдвинуты относительно друг друга на 120° эл., составляющих в данном случае 1/6 окружности (рис.53 а).
и соединены последовательно или параллельно. Отдельные фазы и их начала А, В, С при этом также сдвинуты относительно друг друга на 120° эл., составляющих в данном случае 1/6 окружности (рис.53 а).
Такая обмотка, как видно из рис.53, создает магнитное поле с  . Это поле также является вращающимся и за один период тока поворачивается на величину двойного полюсного деления
. Это поле также является вращающимся и за один период тока поворачивается на величину двойного полюсного деления  , что в данном случае составляет половину окружности (рис.53 б), вследствие чего частота вращения магнитного поля
, что в данном случае составляет половину окружности (рис.53 б), вследствие чего частота вращения магнитного поля
В общем случае можно изготовить обмотку с  и т. д. При этом получается магнитное поле с
и т. д. При этом получается магнитное поле с  парами полюсов. Магнитное поле вращается со скоростью в оборотах в секунду
парами полюсов. Магнитное поле вращается со скоростью в оборотах в секунду
или в оборотах в минуту
 .
.
В табл. 1 приведены частоты вращения магнитного поля обмоток с различными числами полюсов при стандартной частоте промышленного тока  = 50 Гц.
= 50 Гц.
Таблица 1

| 1
| 2
| 3
| 4
| 5
| 6
| 8
| 10
|
 , об/мин , об/мин
| 3000
| 1500
| 1000
| 750
| 600
| 500
| 375
| 300
|
Вывод: для получения с помощью обмотки статора вращающегося магнитного поля необходимо выполнение следующих условий:
1. В пазах сердечника статора должна быть уложена трехфазная симметричная (т.е. имеющая в каждой фазе одинаковые активные и индуктивные сопротивления) обмотка.
2. Начала фаз обмотки статора должны быть сдвинуты относительно друг друга на 1200 эл., что соответствует углу  по внутренней окружности статора.
по внутренней окружности статора.
3. По трехфазной обмотки статора должна протекать трехфазная симметричная (т.е. токи должны быть одинаковы в каждой фазе по величине и сдвинуты во времени на 1/3 периода) система токов.
Рис. 57. Устройство трехфазного асинхронного двигателя
с короткозамкнутым ротором: 1 — вал; 2, 6 — подшипники; 3, 7 — подшипниковые щиты; 4 — коробка выводов; 5 — вентилятор; 8 — кожух вентилятора; 9 — сердечник ротора с короткозамкнутой обмоткой; 10 — сердечник статора с обмоткой; 11 — корпус; 12 — лапы.
Параллельную работу с сетью
На электростанциях обычно устанавливаются несколько генераторов, которые включаются на параллельную работу в общую сеть. В современных энергосистемах на общую сеть, кроме этого работает целый ряд электростанций, и поэтому параллельно на общую сеть работает большое число синхронных генераторов.
При включении СГ на параллельную работу необходимо избегать чрезмерно большого толчка тока и возникновения ударных электромагнитных моментов и сил, способных вызвать повреждения генератора.
Следовательно, необходимо отрегулировать надлежащим образом режим работы генератора на холостом ходу перед его включением на параллельную работу и в надлежащий момент времени включить генератор в сеть. Совокупность этих операций называется синхронизацией генератора.
Идеальные условия для включения генератора на параллельную работу достигаются при соблюдении следующих условий:
1. ЭДС включаемого генератора  должна быть числено равна напряжению сети
должна быть числено равна напряжению сети  или уже работающего генератора;
или уже работающего генератора;
2. частота ЭДС генератора должна равняться частоте напряжения сети;
3. чередование фаз генератора и сети должно быть одинаково;
4. ЭДС генератора и напряжение сети должны быть в фазе относительно общей нагрузки.
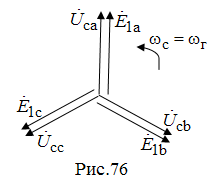 При указанных условиях векторы ЭДС генератора и напряжения сети совпадают и вращаются с одинаковой скоростью, рис.76, и разность потенциалов между контактами выключателя при включении генератора равна нулю и не возникает никакого толчка тока.
При указанных условиях векторы ЭДС генератора и напряжения сети совпадают и вращаются с одинаковой скоростью, рис.76, и разность потенциалов между контактами выключателя при включении генератора равна нулю и не возникает никакого толчка тока.
Равенство ЭДС и напряжения (первое условие) достигается путем регулирования тока возбуждения генератора и контролируется с помощью вольтметра. Изменение частоты и фазы ЭДС генератора (второе и четвертое условия) достигается изменение скорости вращения ротора генератора воздействием на приводной двигатель. Правильность чередования фаз необходимо проверять только при первом включении генератора после монтажа или сборки схемы. Совпадение ЭДС и напряжения по фазе контролируется с помощью ламп, нулевых вольтметров или специальных синхроноскопов, а в автоматических синхронизаторах – с помощью специальных измерительных элементов.
Неправильная синхронизация может вызвать серьезную аварию. Например, если ЭДС генератора и напряжение сети сдвинуты по фазе на 1800, то это эквивалентно короткому замыканию при удвоенном напряжении. Поэтому ударный ток при включении может превысить ток обычного короткого замыкания в два раза, а ударные электромагнитные моменты и силы – в четыре.
Для включения СГ в сеть используют один из двух способов синхронизации:
1) метод точной синхронизации (осуществляется проверка выполнения всех четырех условии);
2) метод грубой синхронизации или самосинхронизации. Ротор невозбужденного синхронного генератора доводят до скорости вращения близкой к синхронной с помощью приводного двигателя, включают в сеть и тут же подают ток на обмотку возбуждения, и ротор сам втягивается в синхронизм.
Второй из указанных способов наиболее часто используется в различных аварийных ситуациях.
Статическая устойчивость
Зависимости  при постоянных: напряжении сети
при постоянных: напряжении сети  , частоте сети
, частоте сети  и токе возбуждения
и токе возбуждения  называются угловыми характеристиками активной мощности и электромагнитного момента синхронной машины.
называются угловыми характеристиками активной мощности и электромагнитного момента синхронной машины.
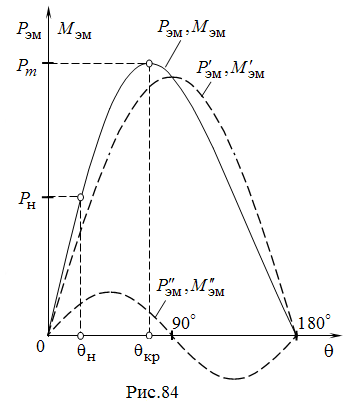
Угловые характеристики  явнополюсного генератора изображены на рис.84 сплошной линией, пунктиром показаны составляющие
явнополюсного генератора изображены на рис.84 сплошной линией, пунктиром показаны составляющие  ,
,  и
и  ,
,  , соответствующие первому и второму слагаемым в (2) и (3). Генератор развивает номинальную активную мощность при номинальном угле нагрузки
, соответствующие первому и второму слагаемым в (2) и (3). Генератор развивает номинальную активную мощность при номинальном угле нагрузки  , максимальную мощность
, максимальную мощность  - при максимальном или критическом угле нагрузки
- при максимальном или критическом угле нагрузки  .
.
Угловые характеристики неявнополюсного генератора представляют собой один полупериод синусоиды (пунктирные линии  ,
,  на рис.84). У таких генераторов
на рис.84). У таких генераторов  ,
,  .
.
 В установившемся режиме работы генератора механические момент
В установившемся режиме работы генератора механические момент  и мощность
и мощность  , подводимые к валу машины от приводного двигателя или турбины, уравновешены электромагнитными моментом
, подводимые к валу машины от приводного двигателя или турбины, уравновешены электромагнитными моментом  и мощностью
и мощностью  .
.
На практике частота  , напряжение
, напряжение  , ток возбуждения
, ток возбуждения  и подводимая к валу механическая мощность
и подводимая к валу механическая мощность  могут меняться. Небольшие изменения этих величин
могут меняться. Небольшие изменения этих величин  ,
,  ,
,  ,
,  вызывают изменение угла нагрузки
вызывают изменение угла нагрузки  .
.
Под статической устойчивостью понимают способность синхронного генератора вернуться к исходному установившемуся режиму работы после окончания действия небольших или медленных изменений (возмущений режима работы)  ,
,  ,
,  ,
,  .
.
Если при работе генератора в номинальном режиме в результате небольшого случайного возмущения угол  увеличится на
увеличится на  , то мощность генератора превысит мощность приводного двигателя на
, то мощность генератора превысит мощность приводного двигателя на  . Вследствие этого на валу генератора возникнет дополнительный тормозной электромагнитный момент
. Вследствие этого на валу генератора возникнет дополнительный тормозной электромагнитный момент  . Скорость вращения ротора и угол нагрузки будут уменьшаться под действием
. Скорость вращения ротора и угол нагрузки будут уменьшаться под действием  до тех пор, пока не восстановится устойчивый установившийся режим работы генератора. Аналогичные рассуждения справедливы и в том случае, если под действие случайного возмущения угол нагрузки уменьшиться.
до тех пор, пока не восстановится устойчивый установившийся режим работы генератора. Аналогичные рассуждения справедливы и в том случае, если под действие случайного возмущения угол нагрузки уменьшиться.
Указанные процессы будут происходить в машине только при  , что является условием статической устойчивости синхронных машин. Оно выполняется если угол нагрузки находиться в пределах
, что является условием статической устойчивости синхронных машин. Оно выполняется если угол нагрузки находиться в пределах  .
.
Разность  между подводимой к машине мощности и отдаваемой ею мощностью, под воздействием которой устойчивое состояние работы восстанавливается, называется синхронизирующей мощностью, так как за счет Δ P возникает синхронизирующий момент Δ M, под действием которого ротор приходит в положение, соответствующее установившемуся режиму работы синхронного генератора.
между подводимой к машине мощности и отдаваемой ею мощностью, под воздействием которой устойчивое состояние работы восстанавливается, называется синхронизирующей мощностью, так как за счет Δ P возникает синхронизирующий момент Δ M, под действием которого ротор приходит в положение, соответствующее установившемуся режиму работы синхронного генератора.
Если нагрузить генератор мощностью  , то он выйдет из синхронизма, так как при любом значении угла
, то он выйдет из синхронизма, так как при любом значении угла  механический вращающий момент
механический вращающий момент  преобладает над тормозным электромагнитным моментом
преобладает над тормозным электромагнитным моментом  . Поэтому максимальная мощность
. Поэтому максимальная мощность  генератора при заданных постоянных
генератора при заданных постоянных  и
и  называется пределом статистической устойчивости.
называется пределом статистической устойчивости.
Запас статистической устойчивости генератора характеризуется отношением максимальной мощности  при номинальных токе возбуждения, напряжении и частоте сети к номинальной мощности:
при номинальных токе возбуждения, напряжении и частоте сети к номинальной мощности:  .
.
Величина  называется перегрузочной способностью генератора. Для большинства генераторов перегрузочная способность должна быть не менее 1,7 (
называется перегрузочной способностью генератора. Для большинства генераторов перегрузочная способность должна быть не менее 1,7 ( ≥ 1,7).
≥ 1,7).
§10. U (V)-образные характеристики синхронной машины
Как было показано ранее, изменение ток возбуждения вызывает изменение только реактивных составляющих тока обмотки якоря и мощности синхронной машины.
U -образными характеристиками называются зависимости тока якоря от тока возбуждения,  при постоянных активной мощности P 2, напряжении и частоте сети.
при постоянных активной мощности P 2, напряжении и частоте сети.
При непрерывном изменении тока возбуждения, рис.85, ток обмотки якоря  (в относительных единицах) и коэффициент мощности
(в относительных единицах) и коэффициент мощности  также непрерывно изменяются. При некотором значении
также непрерывно изменяются. При некотором значении  величина
величина  минимальна и
минимальна и  =1. При увеличении тока возбуждения (режим перевозбуждения) и его уменьшении (режим недовозбуждения) относительно указанного значения ток
=1. При увеличении тока возбуждения (режим перевозбуждения) и его уменьшении (режим недовозбуждения) относительно указанного значения ток  возрастает, так как возрастает его реактивная составляющая, а коэффициент мощности убывает.
возрастает, так как возрастает его реактивная составляющая, а коэффициент мощности убывает.

|
|
|











