Назначение: обеспечение необходимого быстродействия при отработке заданного сигнала  (например, времени нарастания при заданных ограничениях на перерегулирование s), удовлетворительных для ручного управления характеристик устойчивости и управляемости (в этом случае назыв. автоматом продольного управления).
(например, времени нарастания при заданных ограничениях на перерегулирование s), удовлетворительных для ручного управления характеристик устойчивости и управляемости (в этом случае назыв. автоматом продольного управления).
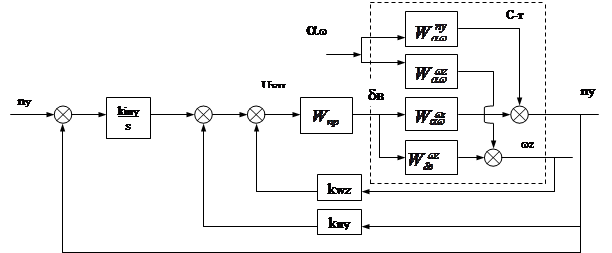
Функциональная схема системы приведена ниже . На схеме обозначено:
- коэффициенты передачи  .
.
- ВУ – вычислительное устройство СУ нормальной перегрузкой;
- ДПРЛ – датчик положения ручки летчика;
- Кл. –ключ – выполняет роль переключателя режимов ручного и автоматического управления.

Нормальная перегрузка  и угловая скорость тангажа
и угловая скорость тангажа  измеряются соответственно ДЛУ и ДУС и через блоки ОС (КУ) поступают на вход усилителя
измеряются соответственно ДЛУ и ДУС и через блоки ОС (КУ) поступают на вход усилителя  , где суммируются с сигналом заданной перегрузки . Назначение ОС по - создание момента демпфирования угловых движений С-та по тангажу. Закон управления демпфера
, где суммируются с сигналом заданной перегрузки . Назначение ОС по - создание момента демпфирования угловых движений С-та по тангажу. Закон управления демпфера
 (2.5)
(2.5)
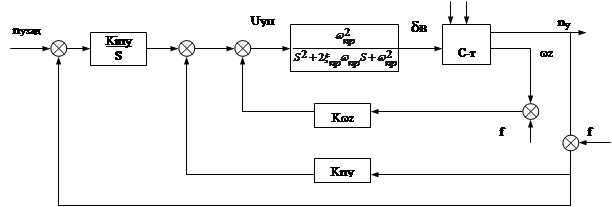
С выхода усилителя сигнал управления U упр поступает на ЭГПР, который отклоняет РВ, изменяя тем самым перегрузку . Сигнал заданной перегрузки в режиме автоматического управления формируется в ВУ системы траекторного управления (СТУ). Расчетная структурная схема системы имеет вид
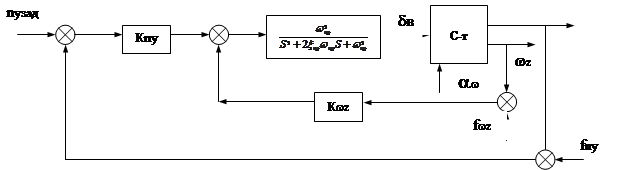
где 
передаточные числа. Закон управления статической системы стабилизации
 (2.6)
(2.6)
На схеме (см. выше) показаны также погрешности измерения угловой скорости  и перегрузки
и перегрузки  , приведенные ко входу соответствующих датчиков.
, приведенные ко входу соответствующих датчиков.
Анализ характеристик системы проводят по следующей схеме: устойчивость; качество процессов стабилизации.
1.) Устойчивость системы. ПФ рассматриваемой замкнутой системы имеет вид
 (2.7)
(2.7)
где коэффициенты характеристического уравнения (х.у.)

имеют вид


 (2.8)
(2.8)


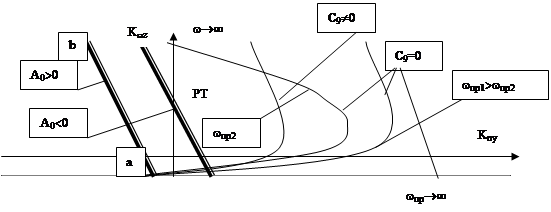
При анализе выясняют влияние характеристик каждого из функциональных элементов системы на ее устойчивость. Обычно выясняют влияние параметров, которые линейно входят в х.у., используя метод D – разбиения в плоскости двух параметров. Используя этот метод строят на плоскости параметров ( ) области устойчивости для двух фиксированных значений частоты привода
) области устойчивости для двух фиксированных значений частоты привода  :
:
- с учетом влияния подъемной силы РВ 
- без учета влияния подъемной силы РВ 
Для этого х.у. приводят к виду

где N(S), M(S), L(S) - полиномы от s, изменяемые параметры, влиянием на устойчивость которых интересуются. Расположение корней Sk этого уравнения на комплексной плоскости будет зависеть от численных значений коэффициентов уравнения. Значения корней являются непрерывными функциями значений коэффициентов, а те являются непрерывными функциями физических параметров системы. При некотором значении коэффициентов х. у. один из вещественных корней обращается в 0 или пара сопряженных корней попадает на мнимую ось (± jw). Для построения областей устойчивости (все корни х.у. лежат в левой полуплоскости) в плоскости двух параметров  необходимо нанести линии, соответствующие границе устойчивости. Уравнение мнимой оси на комплексной плоскости S=j w
необходимо нанести линии, соответствующие границе устойчивости. Уравнение мнимой оси на комплексной плоскости S=j w
Поэтому подставляя в (2.9) S=j w, получим выражение для границы D-разбиения в плоскости параметров

Введем обозначения

и разобьем (2.11) на два уравнения, приравняв отдельно вещественную и мнимую части нулю


Решение системы уравнений (2.12) и (2.13) относительно
где D - главный определитель системы.
 (2.14)
(2.14)

D1, D2 - частные определители.
Так как  - нечетные функции w, то D, D1, D2 также нечетные функции w, а - четные функции. Задавая значения w от -¥ до +¥, получим совокупность точек, образующих кривую D-разбиения. Причем значениям w= -w и w= +w соответствует одна и та же точка кривой (D, D1, D2 - четные функции). Поэтому кривая изображающей точкой "пробегается" дважды.
- нечетные функции w, то D, D1, D2 также нечетные функции w, а - четные функции. Задавая значения w от -¥ до +¥, получим совокупность точек, образующих кривую D-разбиения. Причем значениям w= -w и w= +w соответствует одна и та же точка кривой (D, D1, D2 - четные функции). Поэтому кривая изображающей точкой "пробегается" дважды.
После построения кривой D-разбиения на ней следует нанести штриховку, характеризующую переход корней уравнения через мнимую ось плоскости корней. При построении кривой D-разбиения и нанесении на нее штриховки руководствуются следующими правилами.
1. Система координат должна быть правой, значения параметра  - откладывается по оси абсцисс, а
- откладывается по оси абсцисс, а  - по оси ординат.
- по оси ординат.
2. Двигаясь по кривой при изменении w в сторону ее возрастания, нужно кривую штриховать с левой стороны, если D>0, и с правой стороны, если D<0. Поскольку четные функции кривая D-разбиения штрихуется двойной штриховкой.
3. Если при значении w=w* выполняется условие

то уравнения (2.12; 2.13) совпадают и описывают уравнение особой прямой. Если свободный член х. у. зависит от параметров , то это соответствует существованию особой прямой для w=0, и ее уравнение будет

Уравнение особой прямой для w=¥ может получится приравниванием 0 коэффициента B 4 при старшей степени s х. у.
Для w=0 и w=¥ особые прямые штрихуют одинарной штриховкой, согласуя направление штриховки с направлением штриховки основной кривой.
Такие особые прямые назыв. концевыми. Если концевые особые прямые не имеют общих точек с основной кривой, то одинарная штриховка наносится на них с той стороны, с которой параметры положительны. Если особых прямых несколько, то каждая из них штрихуется отдельно, независимо от того, пересекает она остальные особые прямые или нет. В окрестности общей точки w*=0;¥ особая прямая штрихуется так, чтобы по одну сторону от точки w* кривая и прямая были обращены друг к другу заштрихованными сторонами, а по другую сторону - незаштрихованными сторонами.
После нанесения штриховки определяют область, претендующую на область устойчивости, т.е. область, внутрь которой направлена штриховка. Затем, выбирая любые значения лежащие в этой области, и подставляя их в х. у., определяют с помощью любого критерия все ли корни х.у. лежат в левой полуплоскости. Если не все корни левые, то в плоскости параметров области устойчивости нет. Определив область устойчивости, можно разметить области с одинаковым числом правых и левых корней, имея в виду, что пересечение границы D-разбиения (или особой прямой с двойной штриховкой) из заштрихованной зоны в незаштрихованную соответствует переходу двух комплексно-сопряженных корней из левой полуплоскости корней в правую и наоборот. Пересечение особой прямой с одной штриховкой соответствует переходу одного корня.
Уравнение концевой особой прямой имеет вид 
Из анализа кривых D-разбиения (см. рис. выше) следует:
- положение левой границы области устойчивости зависит от характеристик свободного С-та (2.3), а именно, устойчив a 0 >0, нейтрален a 0 =0 или неустойчив a 0 < 0 свободный С-т. Причем для статически неустойчивого С-та область устойчивости сужается;
- если привод безынерционен (w пр ® ¥) и C 9 =0, то кривая D-разбиения вырождается в горизонтальную прямую аб и область устойчивости самая обширная, образованная особой прямой и ав;
- область устойчивости тем меньше, чем меньше быстродействие привода
- область устойчивости тем меньше, чем больше величина подъемной силы РВ
Влияние подъемной силы на устойчивость объясняется тем, что ПФ С-та по (2.3)

можно представить ввиде

т.е. помимо основной цепи прохождения сигналов от РВ к (1) существует параллельная цепь (2), которая через ДЛУ, цепь ОС по , привод образует замкнутый контур с положительной ОС, сужающая область устойчивости системы по параметру в три – четыре раза. Это отражается на быстродействие СУ и приводит к ухудшению качества процессов.
2.) Качество процессов стабилизации заданной нормальной перегрузки оценивается по статическим и динамическим ошибкам, возникающим при отработке , а также в результате действия возмущений (в частности, ветровых) и помех.
Для определения статических (установившихся) ошибок используют теорему о конечном значении оригинала функции
Ошибка отработки =const имеет вид

Подставляя (2.7) в (2.20), с учетом теоремы о конечных значениях получают выражение для статической ошибки системы
 Для статически устойчивого С-та
Для статически устойчивого С-та


поэтому статическая ошибка  всегда обратна по знаку . Это означает, что установившееся значение перегрузки всегда будет меньше заданной. Уменьшить ошибку можно путем увеличения , увеличение же приводит к ее увеличению.
всегда обратна по знаку . Это означает, что установившееся значение перегрузки всегда будет меньше заданной. Уменьшить ошибку можно путем увеличения , увеличение же приводит к ее увеличению.
Для определения статической ошибки при действии возмущающего момента  используют выражение для ПФ
используют выражение для ПФ 
В результате получают


Динамические ошибки системы обычно оценивают по показателям качества переходного процесса  - быстродействию
- быстродействию  и перерегу-лированию s - при отработке заданной перегрузки . Для анализа СУ воспользуемся упрощенной моделью системы, принимая:
и перерегу-лированию s - при отработке заданной перегрузки . Для анализа СУ воспользуемся упрощенной моделью системы, принимая:
- привод безынерционен w пр ® ¥ (порядок знаменателя ПФ системы понижается с 4 до 2 –го);
- подъемная сила РВ не учитывается C 9 =0 (порядок числителя ПФ системы понижается со 2 до 0 –го).
 Указанные упрощения допустимы только в случае: наличия достаточных запасов устойчивости и полоса пропускания замкнутой системы далека от частоты, определяемой нулями ПФ свободного С-та (2.4.1). Тогда высокочастотные компоненты движения, обусловленные влияние подъемной силы РВ и динамикой привода, проявлясь в начальной стадии переходного процесса малы и быстро затухают. Поэтому исходная система 4-го порядка может быть заменена системой 2-го, показатели качества которой с требуемой точностью совпадают с исходными см. рис.
Указанные упрощения допустимы только в случае: наличия достаточных запасов устойчивости и полоса пропускания замкнутой системы далека от частоты, определяемой нулями ПФ свободного С-та (2.4.1). Тогда высокочастотные компоненты движения, обусловленные влияние подъемной силы РВ и динамикой привода, проявлясь в начальной стадии переходного процесса малы и быстро затухают. Поэтому исходная система 4-го порядка может быть заменена системой 2-го, показатели качества которой с требуемой точностью совпадают с исходными см. рис.
ПФ упрощенной модели имеет вид

где  ;
; 
Вывод: - увеличение ведет к увеличению собственной частоты w о колебательного звена и увеличению относительного коэффициента затухания x
- увеличение ведет к увеличению собственной частоты w о колебательного звена и уменьшению относительного коэффициента зату-хания.
На основании (2.15) находят выражения для и из условия удовлетворения желаемым значениям x и w о. Так как аэродинамические характеристики с-та изменяются в широком диапазоне, то используют корректоры передаточных чисел. Коррекцию и производят в зависимости от изменения высоты и скорости полета. Ниже приведены графики зависимостей и от скоростного напора  и высоты Н.
и высоты Н.
 Kwz Kny
Kwz Kny
H2>H1
При технической реализации зависимости и упрощают путем аппроксимации менее сложными (на рис. показано пунктиром). Иногда решение задачи удовлетворения области желаемых значений x и w о можно найти в рамках жесткой структуры с постоянной настройкой передаточных чисел.
 На рис. показана область изменений значений
На рис. показана область изменений значений

 x V1
x V1
Ho
V2
H1
H2
 w о
w о
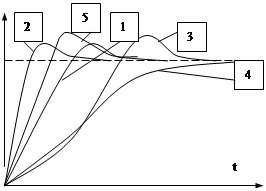
если она совпадает с областью допустимых значений, то можно ограничиться жестким регулятором. На рис. (см. выше) пунктирными линиями показаны линии равных значений высоты Н и скорости V полета, а также показаны переходные процессы, соответствующие некоторым точкам на границе и в центре области x и w о Центр области (точка 1) обычно соответствует значению
При таком значении x переходный процесс имеет перерегулирование s=3% и длительность =3/ w о.
Недостатки: статическая система стабилизации заданной нормальной перегрузкой имеет статические ошибки при отработке и при действии постоянного возмущающего момента .
5.2.2. Астатическая система стабилизации
заданной нормальной перегрузки
В закон управления вводят интеграл по ошибке управления

Это позволяет устранить существенный недостаток, присущий статической системе – статические ошибки при отработке команды и при действии возмущающего момента .
Использование в законе (2.17) сигнала
приводит к форсированию переходного процесса при отработке и затрудняет получение качественных процессов в широком диапазоне высот и скоростей полета. Поэтому на практике используют закон вида

Структурная схема, соответствующая (2.18) имеет вид
ПФ замкнутой астатической системы имеет вид

где 



Коэффициенты знаменателя ПФ астатической системы можно выразить через коэффициенты знаменателя статической системы (2.8)




Так как коэффициенты при старших степенях совпадают, то высокочастотные компоненты движения статической и астатической системы будут мало отличаться. Отличие будет в основном в низкочастотных компонентах движения.
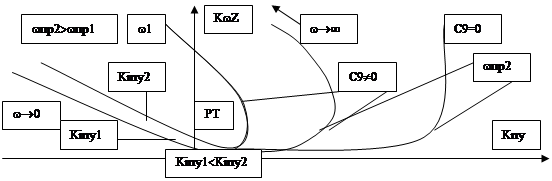
Устойчивость системы. На рис. (см. ниже) построены границы областей устойчивости с учетом ( ) и без учета (
) и без учета ( ) влияния подъемной силы РВ, для двух значений собственной частоты привода
) влияния подъемной силы РВ, для двух значений собственной частоты привода  и для двух значений передаточного числа интегратора
и для двух значений передаточного числа интегратора  .
.
По сравнению с границей области устойчивости статической системы у астатической изменилась левая граница. Кривая D-разбиения при w ® 0 уходит в бесконечность во втором квадранте, смещается вправо с ростом и при этом сокращается сама область устойчивости. При больших  граница лежит выше оси
граница лежит выше оси  и, следовательно, ОС по wz становится функционально необходимой по условиям устойчивости. На остальные участки границы области устойчивости введение интеграла в закон управления (2.6) практически никак не сказывается, т.е. характер влияния подъемной силы РВ и динамики привода на устойчивости астатической системы сохраняется.
и, следовательно, ОС по wz становится функционально необходимой по условиям устойчивости. На остальные участки границы области устойчивости введение интеграла в закон управления (2.6) практически никак не сказывается, т.е. характер влияния подъемной силы РВ и динамики привода на устойчивости астатической системы сохраняется.
Оценка точности. Введение интеграла в закон управления позволяет устранить статические ошибки стабилизации, за исключением ошибки из-за погрешности измерения перегрузки f ny ДЛУ, так как РВ будет отклоняться до тех пор пока не будет выполнено условие = 0 сигнала на входе интегратора т.е.
 или
или 
Динамические ошибки. Для анализа показателей качества будем использовать упрощенную модель системы. Тогда для случая безынерционного привода и отсутствия влияния подъемной силы РВ
 ;
;
где
 ; (2.22)
; (2.22)
 ;
; 
Для выбора настроек передаточных чисел , , можно воспользоваться методом стандартных коэффициентов. Обозначив коэффициенты (2.22) следующим образом:
 ;
;
 ;
;
 .
.
можно записать ПФ в виде

Введя замену переменной 
Характеристический полином такой ПФ хорошо изучен и представляет собой полином Вышнеградского, для которого установлена связь между величинами коэффициентов  , распределением корней и показателями качества нормированных переходных процессов для некоторых значений коэффициентов
, распределением корней и показателями качества нормированных переходных процессов для некоторых значений коэффициентов
. Реальные переходные процессы будут отличаться от нормированных только длительностью, определяемой выражением
 ;
; 
где  - длительность нормированного переходного процесса.
- длительность нормированного переходного процесса.
Рекомендуемые коэффициенты Вышнеградского
| B 2
| B 1
| l 1
| l 2,3
| t н, с
| Примечание
|
| 3
| 3
| -1
| l2=l3=-1
| 6.0
| s=0
|
| 2.5
| 2.5
| -1
| -0.75±j0.66
| 4.0
| s»0
|
| 2.0
| 2.0
| -1
| -0.5±j0.87
| 3.6
| s£10%
|
| 1.75
| 2.15
| -0.7
| -0.525±j1.07
| 3.2
| s£3%
|
При изменении W процесс будет сжиматься либо растягиваться по оси времени, сохраняя ординаты неизменными. Колебательность и перерегулирование при этом не изменяются.
По заданным требованиям к s, форме переходного процесса выбираются значения . По требуемому быстродействию ( - определяется выбранными коэффициентами ) определяется согласно (2.24) величина W. Затем из (2.23), (2.22) определяют передаточные числа, удовлетворяющие заданным требованиям.
Недостаток астатической системы: имеет меньшую область устойчивости и меньшее быстродействие, чем статическая система.
Стабилизация перегрузки при полете в турбулентной атмосфере. Турбулентность атмосферы представляет собой стационарный случайный процесс. В этом случае критерием, определяющим точность системы, является среднее квадратическое значение ошибки (СКО) стабилизации. Величина СКО
 ;
;
где S ny - спектральная плотность ошибки D n y, которую можно найти, используя связь между спектральными плотностями величин на входе и выходе линейной динамической системы
 ;
;
 где
где  - модуль частотной функции системы стабилизации на ветровое возмущение a w. На рис. ниже представлена расчетная схема прохождения ветрового возмущения
- модуль частотной функции системы стабилизации на ветровое возмущение a w. На рис. ниже представлена расчетная схема прохождения ветрового возмущения
где  и
и  ПФ свободного С-та на ветровое возмущение a w, полученные из системы уравнений (2.1)
ПФ свободного С-та на ветровое возмущение a w, полученные из системы уравнений (2.1)
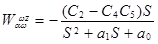 ; (2.28)
; (2.28)
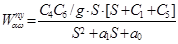 .
.
Используя правила эквивалентных преобразований структурных схем, находим выражение для ПФ функции системы стабилизации на ветровое возмущение

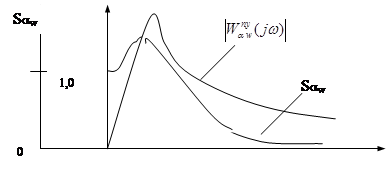
Эффект применения системы стабилизации перегрузки иллюстрируется на рис. ниже
где Saw - спектральная плотность ветрового возмущения;  - амплитудночастотная характеристика свободного С-та по перегрузке. Основная энергия ветровых возмущений сосредоточена в низкочастотной области спектра, поэтому за счет сдвига резонансного пика частотной характеристики
- амплитудночастотная характеристика свободного С-та по перегрузке. Основная энергия ветровых возмущений сосредоточена в низкочастотной области спектра, поэтому за счет сдвига резонансного пика частотной характеристики
 вправо и уменьшения его по величине (при существенной величине подъемной силы РВ резонансный пик частотной характеристики может быть больше, чем у свободного С-та) можно снизить перегрузки от турбулентности, по крайней мере, в низкочастотной области – области существенной для выдерживания заданного траекторного движения С-та (отклонения по вертикальной скорости, получаются интегрированием ошибки стабилизации перегрузки, а по высоте - двойным интегрированием, амплитудночастотная характеристика же интегрирующего устройства обратно пропорциональна частоте - g/w). Смещение вправо резонансного пика частотной характеристики и достигается применением СУ нормальной перегрузкой, причем астатическая система, по сравнению со статической имеет более высокую точность стабилизации в низкочастотной области, но больший резонансный пик.
вправо и уменьшения его по величине (при существенной величине подъемной силы РВ резонансный пик частотной характеристики может быть больше, чем у свободного С-та) можно снизить перегрузки от турбулентности, по крайней мере, в низкочастотной области – области существенной для выдерживания заданного траекторного движения С-та (отклонения по вертикальной скорости, получаются интегрированием ошибки стабилизации перегрузки, а по высоте - двойным интегрированием, амплитудночастотная характеристика же интегрирующего устройства обратно пропорциональна частоте - g/w). Смещение вправо резонансного пика частотной характеристики и достигается применением СУ нормальной перегрузкой, причем астатическая система, по сравнению со статической имеет более высокую точность стабилизации в низкочастотной области, но больший резонансный пик.