Т. В. ВИНОГРАДОВА, Ю. В. КУЛИДА
АНАЛИЗ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ
Учебное пособие
Санкт-Петербург
2017
УДК 621.81
Рецензенты: канд. техн. наук, доцент Б. С. Доброборский (СПбГАСУ);
канд. техн. наук, доцент Я. С. Ватулин (Петербургский государственный университет путей сообщения Императора Александра I)
Виноградова, Т. В.
Анализ плоских рычажных механизмов: Учебное пособие / Т. В. Виноградова, Ю. В. Кулида; СПбГАСУ. – СПб., 2017. – 000 с.
ISBN
Разработано в соответствии с программами и учебными планами дисциплины «Теория машин и механизмов» и разделов, изучающих теорию машин и механизмов в составе дисциплин «Механика» и «Прикладная механика». Содержит указания по курсовому проектированию в рамках дисциплины «Теория машин и механизмов».
Изложен порядок выполнения заданий по исследованию кинематики и динамики механизмов. Приведены методы анализа механизмов с помощью графических построений и графоаналитические методы анализа плоских рычажных механизмов.
Рассмотрены примеры выполнения кинематического и силового анализа плоских рычажных механизмов и решения задач, предлагаемых при изучении дисциплин «Прикладная механика» и «Механика». Даны задания для курсового проектирования в рамках дисциплины «Теория машин и механизмов».
Табл. 4. Ил. 36. Библиогр.: 6 назв.
Рекомендовано Учебно-методическим советом СПбГАСУ в качестве учебного пособия.
ISBN © Т. В. Виноградова, Ю. В. Кулида, 2017
© Санкт-Петербургский государственный
архитектурно-строительный университет, 2017
Введение
Большинство современных машин при проектировании можно представить по схеме «двигатель – передаточный механизм – рабочий орган технологической машины (исполнительный механизм)» (рис. 1.1). В качестве исполнительных механизмов часто применяются различные рычажные механизмы. Двигатель и передаточный механизм объединяют в привод машины.
Привод – это энергосиловое устройство, приводящее в движение машину или механизм, т. е. предназначенное для преобразования подводимой первичной энергии в механическую работу, осуществляемую исполнительными органами машины.
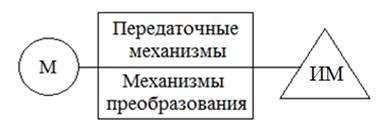
Рис. 1.1. Блок-схема машины: М – двигатель; ИМ – исполнительный механизм
Курсовая работа предусматривает исследование структуры, кинематики и динамики рычажного исполнительного механизма. Расчеты могут выполняться двумя способами: аналитическим и графоаналитическим.
Аналитический метод анализа механизма заключается в определении его кинематических и динамических характеристик в виде аналитических выражений, содержащих конечное число алгебраических или тригонометрических операций и определяющих функцию явно, неявно или параметрически. Эта часть расчетов выполняется с помощью ЭВМ.
Графоаналитический метод анализа представляет собой графические вычисления, основанные на геометрических построениях, связанных с использованием достаточно простых аналитических соотношений (например, векторных), с некоторым приближением заменяющих аналогичные аналитические операции. Эти расчеты по определению кинематических параметров механизма и инерционных нагрузок выполняются студентами в качестве проверочных.
При вычислениях с помощью ЭВМ необходимо иметь общее представление о машине, параметры которой рассчитываются, и о механизмах, входящих в ее состав. Поэтому перед тем как приступить к исследованию механизма с помощью ЭВМ, необходимо разобраться в логической структуре и особенностях работы используемой программы, а также подробно изучить кинематическую схему рычажного механизма.
Допустимое расхождение между результатами вычислений по аналитическим формулам и по графоаналитическим построениям составляет 5–10 %.
Задание на проведение кинематического и динамического анализа механизма
Основное содержание данной курсовой работы заключается в исследовании структуры, кинематики и динамики заданного плоского рычажного механизма и определении параметров привода машины. Работа состоит из ряда взаимосвязанных и последовательно выполняемых этапов:
1) вычертить кинематическую схему механизма;
2) определить степень свободы механизма;
3) определить траектории движения основных точек механизма; выбрать направление рабочего и холостого хода в течение одного кинематического цикла;
4) построить планы линейных скоростей и ускорений характерных основных точек звеньев механизма и центров масс S за тот же цикл движения;
5) определить внешнюю нагрузку и момент сил полезного сопротивления М пс, приведенные к главному валу механизма (кривошипу);
6) определить моменты инерции звеньев и рассчитать приведенный к главному валу механизма (кривошипу) момент инерции масс движущихся звеньев;
7) выбрать по каталогу электродвигатель, исходя из его мощности Р дв; для выбранного двигателя выписать значение номинальной частоты вращения п дв;
8) определить общее передаточное отношение зубчатого механизма (передаточное число редуктора u = n дв/ n кр, где n дв – номинальная частота вращения вала электродвигателя; n кр – частота вращения кривошипа), а также передаточное отношение каждой его ступени;
9) оформить пояснительную записку, содержащую:
- структурный анализ механизма;
- кинематический анализ;
- силовой анализ;
- динамический анализ;
- механические характеристики электродвигателя;
- расчет геометрических параметров маховика;
10) выполнить на листах формата А1 графическую часть задания, включающую:
- общую структурную схему машины с заданным рычажным механизмом;
- графики положений, скорости и ускорения движения исполнительного органа (ползуна) с численными значениями для шести положений;
- график задания внешней нагрузки и методы определения приведенного момента сил:
а) план сил и определение уравновешивающих и приведенных сил и моментов методом рычага Н. Е. Жуковского;
б) то же методом кинетостатики;
- график изменения приведенного момента Mi пр для шести положений механизма;
- диаграмму работы сил сопротивления (для машины-орудия) А с = f (φ1);
- диаграмму избыточной работы;
- чертеж маховика.
Решение
1. Приведенный момент сил определяем по формуле (3.5):

2. Требуемая мощность электродвигателя (Вт) при КПД привода ηобщ = 0,8:

Выбираем электродвигатель с мощностью Р дв = 7,5 кВт (номинальная частота вращения n дв = 1455 об/мин).
3. Общее передаточное отношение для передаточного механизма (передаточное число редуктора):
u = n дв/ n кр = 1455/75 = 19,4.
4. Приведенный момент инерции звена приведения (кривошипа) вычисляется из условия, что кинетическая энергия этого звена равна сумме кинетических энергий всех подвижных звеньев механизма.
Кинетическая энергия приведенного момента инерции к звену приведения определяется по формуле (4.6):

Кинетическая энергия всех подвижных звеньев механизма:
- звена О 1 А: 
- звена АВ: 
- звена О 2 В: 
- звена ВС: 
- звена С: 
Момент инерции подвижного звена:
JSi = mi · pi 2,
где pi – радиус инерции звена, м, pi = 0,3 li, li – длина звена, м.
Таким образом, приведенный момент инерции звена приведения, кг·м2:

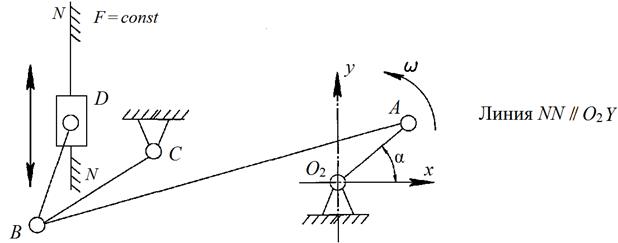
Схема № 1
| Вариант
| Координаты шарнира С, см
| Ордината точки Е, см
| Размеры звеньев, см
| Скорость вращения кривошипа n, об/мин
| Вес звеньев, кг
| Сила сопротивления F, H
|
| ХС
| Y С
| АО 2
| АВ
| ВС
| CD
| DE
| АО 2
| АВ
| BD
| ED
| Е
|
| 1
| –74
| 0
| 12
| 7
| 75
| 17
| 35
| 40
| 190
| 0,8
| 10
| 15
| 1,5
| 3
| 4200
|
| 2
| –74
| 0
| 14
| 8
| 78
| 18
| 38
| 42
| 180
| 1
| 8
| 14
| 2
| 3,5
| 5500
|
| 3
| –74
| 0
| 16
| 7,5
| 75
| 17
| 40
| 45
| 175
| 2
| 6
| 10
| 1
| 2,5
| 6000
|
| 4
| –67
| 20
| 10
| 10
| 68
| 17
| 20
| 50
| 160
| 1,5
| 6
| 12
| 3,4
| 3,8
| 4500
|
| 5
| –67
| 20
| 15
| 12
| 70
| 15
| 23
| 40
| 180
| 3
| 8,4
| 19
| 2
| 2,4
| 4200
|
| 6
| –67
| 20
| 15
| 9
| 54
| 25
| 30
| 45
| 150
| 2
| 9
| 18
| 1,8
| 4,2
| 6100
|
| 7
| –55
| 15
| 18
| 10
| 52
| 20
| 30
| 40
| 165
| 2,5
| 9
| 8
| 3
| 5
| 5500
|
| 8
| –55
| 15
| 18
| 10
| 54
| 20
| 27
| 36
| 160
| 3
| 6
| 10
| 2,5
| 10
| 7500
|
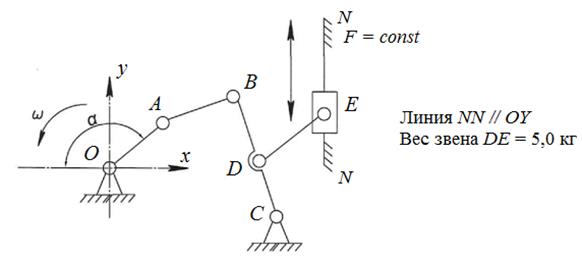
Схема № 2
| Вариант
| Координаты шарнира С, см
| Абсцисса XD, cм
| Размеры звеньев, см
| Скорость вращения кривошипа n, об/мин
| Вес звеньев, кг
| Сила сопротивления F, H
|
| ХС
| Y С
| АО 2
| АВ
| ВС
| ВD
| АО 2
| АВ
| BС
| B D
| D
|
| 1
| –29
| 26
| –29
| 10
| 53
| 25
| 45
| 180
| 0,3
| 0,7
| 0,5
| 0,4
| 0,4
| 8000
|
| 2
| –43
| 33
| –20
| 8
| 52
| 28
| 50
| 170
| 0,4
| 0,8
| 0,4
| 0,4
| 0,8
| 5800
|
| 3
| –39
| 12
| –26
| 4
| 30
| 20
| 28
| 133
| 0,4
| 0,4
| 0,3
| 0,2
| 0,1
| 6000
|
| 4
| –69
| 0
| –69
| 5
| 66
| 45
| 30
| 134
| 0,3
| 0,4
| 0,3
| 0,3
| 0,2
| 7800
|
| 5
| –28
| 26
| –28
| 10
| 50
| 25
| 40
| 198
| 0,3
| 1
| 0,7
| 0,3
| 0,3
| 5200
|
| 6
| –29
| 12
| –23
| 4
| 23
| 14
| 30
| 142
| 0,3
| 0,6
| 0,5
| 0,2
| 0,1
| 7000
|
| 7
| –43
| 30
| –24
| 8
| 52
| 28
| 50
| 140
| 0,2
| 0,9
| 0,5
| 0,4
| 0,2
| 8000
|
| 8
| –39
| 12
| –28
| 4
| 30
| 20
| 24
| 130
| 0,6
| 0,9
| 0,8
| 0,7
| 0,4
| 7500
|
| 9
| –67
| 0
| –40
| 5
| 60
| 30
| 35
| 144
| 0,5
| 0,7
| 0,6
| 0,3
| 0,2
| 8400
|
| 10
| –47
| 20
| –30
| 8
| 52
| 28
| 40
| 160
| 0,4
| 1,3
| 0,7
| 0,3
| 0,9
| 7600
|
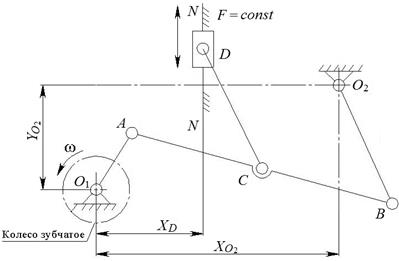
Схема № 3
| Вариант
| α, град.
| Координаты шарнира С, см
| Абсцисса точки Е, cм
| Размеры звеньев, см
| Скорость вращения кривошипа n, об/мин
| Вес звеньев, кг
| Сила сопротивления F, H
|
| ХС
| Y С
| АО
| AB
| BC
| DE
| CD
| АО
| АВ
| B С
| Е
|
| 1
| 35
| 42
| –3
| 60
| 7
| 40
| 25
| 45
| 13
| 250
| 0,8
| 4
| 2,4
| 3
| 8000
|
| 2
| 60
| 48
| –4
| 62
| 8
| 42
| 30
| 48
| 15
| 300
| 1
| 5
| 3
| 3,5
| 7300
|
| 3
| 110
| 60
| –5
| 70
| 10
| 50
| 32
| 51
| 16
| 300
| 1,2
| 6
| 3,6
| 2,5
| 8500
|
| 4
| 160
| 12
| –6
| 80
| 12
| 60
| 40
| 63
| 20
| 350
| 15
| 7,5
| 4,5
| 3,8
| 7000
|
| 5
| 210
| 54
| –4
| 65
| 9
| 50
| 35
| 54
| 18
| 200
| 3
| 15
| 9
| 2,4
| 8100
|
| 6
| 190
| 48
| –4
| 55
| 8
| 45
| 32
| 50
| 16
| 200
| 2
| 10
| 6
| 4,2
| 7300
|
| 7
| 230
| 48
| –4
| 55
| 8
| 48
| 33
| 52
| 17
| 350
| 2,5
| 12
| 7,5
| 5
| 5600
|
| 8
| 260
| 42
| –3
| 55
| 7
| 45
| 23
| 50
| 10
| 350
| 3
| 16
| 8
| 6
| 6400
|
| 9
| 320
| 54
| –5
| 65
| 9
| 52
| 36
| 57
| 19
| 250
| 3
| 14
| 9,5
| 1,2
| 7500
|
| 10
| 130
| 60
| –5
| 79
| 10
| 50
| 35
| 52
| 18
| 240
| 1
| 5
| 3
| 4
| 8000
|
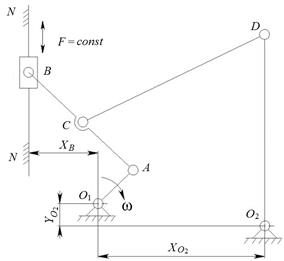
Схема № 4
| Вариант
| Координаты шарниров D и O 2, см
| Размеры звеньев, см
| Скорость вращения кривошипа n, об/мин
| Вес звеньев, кг
| Сила сопротивления F, H
|
| ХD
| ХO 2
| YО 2
| О 1 А
| АВ
| О 2 В
| CD
| AC
| О 1 А
| А B
| O 2 B
| CD
| D
|
| 1
| 28
| 72
| 24
| 15
| 80
| 20
| 40
| 40
| 160
| 3
| 5
| 5
| 2
| 2
| 5000
|
| 2
| 27
| 75
| 38
| 20
| 80
| 22
| 40
| 40
| 180
| 4
| 8
| 2
| 3
| 3
| 2000
|
| 3
| 35
| 80
| 35
| 18
| 90
| 25
| 45
| 45
| 120
| 4
| 8
| 4
| 3
| 3
| 3000
|
| 4
| 42
| 82
| 55
| 15
| 85
| 42
| 42
| 40
| 150
| 4
| 6
| 3
| 2,5
| 2
| 2500
|
| 5
| 60
| 94
| 53
| 20
| 110
| 42
| 55
| 55
| 140
| 5
| 8
| 6
| 6
| 4
| 3500
|
| 6
| 65
| 120
| 55
| 25
| 110
| 45
| 55
| 55
| 170
| 2
| 10
| 5
| 5
| 3
| 4000
|
| 7
| 60
| 120
| 55
| 30
| 120
| 50
| 70
| 60
| 120
| 3
| 12
| 6
| 6
| 2
| 5000
|
| 8
| 60
| 112
| 55
| 32
| 110
| 50
| 75
| 55
| 130
| 3,5
| 10
| 7
| 7
| 4
| 4000
|
| 9
| 60
| 110
| 55
| 35
| 120
| 60
| 85
| 60
| 120
| 4
| 9
| 8
| 8
| 5
| 2500
|
| 10
| 60
| 120
| 55
| 28
| 110
| 55
| 75
| 55
| 150
| 4,5
| 10
| 9
| 8,5
| 4
| 3000
|
Схема № 5

| Вариант
| Координаты точки О 2, см
| Размеры звеньев, см
| Скорость вращения кривошипа n, об/мин
| Вес звеньев, кг
| Сила сопротивления F, H
|
| ХO 2
| YО 2
| О 1 А
| АВ
| ВС
| О 2 В
| О 1 А
| А B
| ВС
| O 2 B
| С
|
| 1
| 30
| 6
| 9
| 38
| 140
| 30
| 160
| 3
| 5
| 5
| 2
| 2
| 5000
|
| 2
| 34
| 6
| 10
| 46
| 150
| 33
| 180
| 4
| 8
| 2
| 3
| 3
| 2000
|
| 3
| 32
| 5
| 11
| 42
| 140
| 35
| 120
| 4
| 8
| 4
| 3
| 3
| 3000
|
| 4
| 33
| 6
| 12
| 46
| 150
| 39
| 150
| 4
| 6
| 3
| 2,5
| 2
| 2500
|
| 5
| 32
| 4
| 14
| 28
| 160
| 35
| 140
| 5
| 8
| 6
| 6
| 4
| 3500
|
| 6
| 35
| 5
| 10
| 45
| 150
| 40
| 170
| 2
| 10
| 5
| 5
| 3
| 4000
|
| 7
| 41
| 7
| 12
| 55
| 150
| 40
| 120
| 3
| 12
| 6
| 6
| 2
| 5000
|
| 8
| 40
| 7
| 14
| 53
| 160
| 45
| 130
| 3,5
| 10
| 7
| 7
| 4
| 4000
|
| 9
| 35
| 6
| 12
| 45
| 150
| 38
| 120
| 4
| 9
| 8
| 8
| 5
| 3500
|
| 10
| 29
| 5
| 10
| 48
| 130
| 32
| 150
| 4,5
| 10
| 9
| 8,5
| 4
| 3000
|
Схема № 6
| Вариант
| Координаты шарниров В и O 2, см
| Размеры звеньев, см
| Скорость вращения кривошипа n, об/мин
| Вес звеньев, кг
| Сила сопротивления F, H
|
| ХВ
| ХO 2
| YО 2
| О 1 А
| АВ
| О 2 D
| CD
| AC
| О 1 А
| А B
| B
| CD
| О 2 D
|
| 1
| 46
| 25
| 0
| 20
| 60
| 40
| 48
| 20
| 160
| 3
| 5
| 5
| 2
| 2
| 5000
|
| 2
| 46
| 26
| 0
| 16
| 60
| 35
| 48
| 20
| 180
| 4
| 8
| 2
| 3
| 3
| 2000
|
| 3
| 45
| 26
| 10
| 15
| 60
| 40
| 48
| 15
| 120
| 4
| 8
| 4
| 3
| 3
| 3000
|
| 4
| 53
| 21
| 14
| 17
| 70
| 60
| 50
| 20
| 150
| 4
| 6
| 3
| 2,5
| 2
| 2500
|
| 5
| 55
| 21
| 14
| 18
| 65
| 55
| 53
| 25
| 140
| 5
| 8
| 6
| 6
| 4
| 3500
|
| 6
| 45
| 28
| 13
| 20
| 65
| 57
| 50
| 25
| 170
| 2
| 10
| 5
| 5
| 3
| 4000
|
| 7
| 47
| 27
| 13
| 22
| 70
| 65
| 65
| 35
| 120
| 3
| 12
| 6
| 6
| 2
| 5000
|
| 8
| 45
| 30
| 27
| 25
| 75
| 70
| 60
| 30
| 130
| 3,5
| 10
| 7
| 7
| 4
| 4000
|
| 9
| 52
| 26
| 20
| 20
| 70
| 75
| 65
| 25
| 120
| 4
| 9
| 8
| 8
| 5
| 2500
|
| 10
| 52
| 26
| 17
| 18
| 50
| 70
| 60
| 20
| 150
| 4,5
| 10
| 9
| 8,5
| 4
| 3000
|
Рекомендуемая литература
1. Теория механизмов и машин: учеб. пособие / М. З. Коловский [и др.]. – М.: Издательский центр «Академия», 2006. – 560 с.
2. Красковский Е. Я. Расчет и конструирование механизмов приборов и вычислительных систем: учеб. пособие / Е. Я. Красковский, Ю. А. Дружинин, Е. М. Филатов; под ред. Ю. А. Дружинина. – М.: Высш. школа, 1991. – 479 с.
3. Виноградова Т. В. Анализ приводов с плоскими рычажными механизмами железнодорожных машин, автоматики, ЭВМ и роботов: учеб.-метод. пособие / Т. В. Виноградова; ПГУПС. – СПб., 2012. – 55 с.
4. Туранов Х. Т. Прикладная механика в сфере грузовых перевозок: учеб. пособие для вузов / Х. Т. Туранов. – Екатеринбург: УрГУПС, 2008. – 347 с.
5. Механика машин: учеб. пособие для втузов / И. И. Вульфсон [и др.]; под ред. Г. А. Смирнова. – М.: Высш. школа, 1996. – 511 с.
6. Элементы приборных устройств: Основной курс: учеб. пособие для студ. вузов: в 2 ч. / О. Ф. Тищенко [и др.]; под ред. О. Ф. Тищенко. – М.: Высш. школа, 1982.
Оглавление
Введение
Задание на проведение кинематического и динамического анализа механизма
Т. В. ВИНОГРАДОВА, Ю. В. КУЛИДА





