

Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...

Архитектура электронного правительства: Единая архитектура – это методологический подход при создании системы управления государства, который строится...
Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
Архитектура электронного правительства: Единая архитектура – это методологический подход при создании системы управления государства, который строится...
Топ:
Характеристика АТП и сварочно-жестяницкого участка: Транспорт в настоящее время является одной из важнейших отраслей народного...
Комплексной системы оценки состояния охраны труда на производственном объекте (КСОТ-П): Цели и задачи Комплексной системы оценки состояния охраны труда и определению факторов рисков по охране труда...
Отражение на счетах бухгалтерского учета процесса приобретения: Процесс заготовления представляет систему экономических событий, включающих приобретение организацией у поставщиков сырья...
Интересное:
Что нужно делать при лейкемии: Прежде всего, необходимо выяснить, не страдаете ли вы каким-либо душевным недугом...
Мероприятия для защиты от морозного пучения грунтов: Инженерная защита от морозного (криогенного) пучения грунтов необходима для легких малоэтажных зданий и других сооружений...
Инженерная защита территорий, зданий и сооружений от опасных геологических процессов: Изучение оползневых явлений, оценка устойчивости склонов и проектирование противооползневых сооружений — актуальнейшие задачи, стоящие перед отечественными...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
Любой экскаватор состоит из· рабочего оборудования (у одноковшовых экскаваторов оно же и транспортирующее), транспортирующего, механического, включающего главным образом передаточные механизмы (трансмиссии), ходового и силового оборудования, а также механизмов управления, металлоконструкций платформы и надстройки, кузова.
Одним из главных признаков различия одноковшовых экскаваторов, определяющих их назначение и область применения, является рабочее оборудование.
Основные виды рабочего оборудования одноковшовых экскаваторов, применяемых на открытых работах - прямая напорная лопата и драглаЙн. Более ограниченно используют обратную лопату, грейфер, струг.
Выпускают четыре вида прямой лопаты: напорную с выдвижной рукоятью, напорную коленно-рычажную, напорную с рабочим оборудованием «Суперфронт» и гидравлическую.
Экскаватор типа прямая напорная лопата состоит из рабочего оборудования, поворотной платформы с кузовом и ходовой гусеничной тележки.
Рабочее оборудование включает в себя ковш, стрелу и рукоять. На верхней кромке ковша установлены сменные зубья, которые после затупления поворачивают на 1800. Днище ковша откидное; при опускании ковша вниз оно автоматически захлопывается. При разгрузке ковша днище открывается тросом с помощью электродвигателя, установленного на стреле. Стрела опирается на поворотную платформу с помощью пятого шарнира и поддерживается в наклонном положении стреловым канатом,проходящим через блоки, установленные на конце стрелы,и двуногой стойке.
Ковш при зачерпывании породы поднимается канатом, который перекинут через головной блок и навивается на барабан подъемной лебедки, установленной на поворотной платформе. Подъем ковша совмещается с подачей рукояти на забой с помощью механизма напора. Экскаватор ЭКГ имеет зубчато-реечный механизм напора, расположенный на стреле, который передает усилие на зубчатую рейку рукояти, удерживаемую в зацеплении с кремальерной шестерней механизма напора седловым подшипником. Рукоять может поворачиваться вокруг напорного вала при подъеме и опускании ковша и двигаться вдоль своей оси при напоре и возврате ковша.
|
|
На поворотной платформе кроме подъемной установлены также стреловая лебедка, поворотный механизм, силовое оборудование и механизмы управления экскаватором.
Поворотная платформа через роликовый круг опирается на раму гусеничной тележки, с которой неподвижно соединен зубчатый венец. В зацеплении с венцом находятся выходные шестерни редукторов механизма поворота. При включении поворотного механизма платформа вместе с рабочим оборудованием может поворачиваться вокруг вертикальной оси в обе стороны на любой угол.
Зубчато-реечным механизмом напора оснащаются экскаваторы, выпускаемыми ПО «Уралмаш».
В экскаваторах типа прямая напорная лопата ЭКГ-8И, ЭКГ-12,5 и других, выпускаемых ПО «Ижорский завод», применяется канатный механизм напора. Выдвижение и возврат рукоятки производятся канатами при помощи напорной лебедки, расположенной на поворотной платформе, и блоков и полу блоков, расположенных соответственно на стреле и рукояти.
Прямые коленно-рычажные напорные лопаты имеют рукоять, кинематически не связанную со стрелой, и перемещающуюся между стойками стрелы. Такие мех лопаты выпускаются также с двумя системами напора - зубчато реечной и канатной.
Основные рабочие размеры прямой напорной лопаты: радиус копания RK, радиус копания на уровне стояния экскаватора RKY, радиус разгрузки Rp, высота копания Нк, глубина копания hK, высота разгрузки Нр•
Глубина черпания прямых лопат обычно невелика, поэтому они работают в забоях, расположенных выше уровня стояния экскаватора. Рабочие размеры зависят от длины стрелы, рукояти и от угла наклона стрелы. Угол наклона стрелы обычно составляет 450, но может быть равен ЗО-600.
|
|
Рабочий цикл экскаватора предусматривает копание (черпание), поворот для разгрузки, разгрузку ковша, поворот к забою и· опускание ковша.
У прямой напорной лопаты с рабочим оборудованием «С у пер Ф р о н т» траектория движения ковша образуется при взаимодействии трех механизмов: подъема, напора и поворота ковша. Рабочее оборудование состоит из ковша, рукояти и стрелы. Механизм подъема включает в себя подъемную лебедку, канат, нижний, установленный на стреле блок, образующий с верхним и уравнительным блоками полиспастную систему подъема рамы и через подъемное звено - ковша. Два напорных гидроцилиндра, закрепленные на двуногой стойке, перемещают при помощи тяги и мачты, поворачивающейся относительно оси напорное звено, передающее усилие на раму. При этом гидрофиксатор через канат, блок, профильный полу блок и канат удерживает ковш от поворота по часовой стрелке вокруг оси. Поворотом рамы механизмом подъема или напора вокруг оси производится возврат ковша звеном в исходное положение. ковш поворачивается относительно оси до полного выбирания слабины каната фиксации положения ковша. Днище ковша при разгрузке открывается пневмоцилиндрами. Стрела может подниматься и опускаться, поворачиваясь вокруг шарнира 0з за счет перемещения мачты гидроцилиндрами.
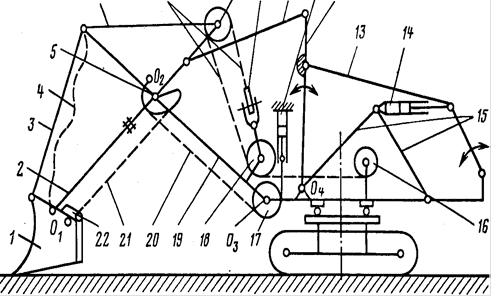
Рабочее оборудование «Суперфронт» (фирма «Марион» США) может перемещать ковш параллельно падошве уступа и эффективно внедрять его в нижнюю часть забоя. Для этого используются вес стрелы, рукояти, а также механизмы подъема и поворота ковша. Однако экскаваторы с данной конструкцией рабочего оборудования имеют пока ограниченное применение.
Механизм подъема
Построение нагрузочных и скоростных диаграмм для предварительного определения средневзвешенной мощности двигателей механизмов подъема, напора и поворота производится исходя из следующих соображений.
Время, затрачиваемое на операции поворота с груженым ковшом, на разгрузку и возвращение порожнего ковша к забою, составляет для мехлопат 60- 70 % полного времени рабочего цикла tц' Поэтому для предварительных расчетов время цикла мехлопаты можно разбить на три равных периода: копание tx.' поворот на разгрузку tp и поворот к забою tз
|
|
При копании (период tK) в режиме без перегрузок расчетное усилие 8пI/ для механизма подъема принимается по формуле (14.3) приР-900ИУр=0.Двигательмеханизма подъема в этом случае работает на рабочей части своей механической характеристики и за расчетную принимается номинальная скорость подъема УП.
Мощность двигателя подъема N за период копания (П положение рукояти, см. рис. 14.1) определяется по формуле (14.2) при значениях
- Sn 11' V1 = Уп' K1 1 и 11i = 11п - 0,8-+0,85,
где 11п - к.п.д механизма подъема.
При повороте платформы с груженым ковшом' (период tp) двигатель механизма подъема, как правило, работает в тормозных режимах противовключения или динамическом. При этом ковш может быть поднят на максимальную высоту, а частота вращения двигателя соответствует «ползучим~ скоростям. Поэтому среднюю скорость механизма подъема за время поворота груженого ковша на разгрузку можно принять равной (0,I+О,3)Уп•
Усилия, возникающие в механизме подъема за время поворота груженого ковша, можно определить из У положения рукояти или по формуле (14.3). Тогда мощность двигателя подъема за период поворота груженого ковша на разгрузку ± N' п определяется из выражения (14.2) при значениях
K1 = (0,1-+0,3); Sl = SN JV; v1 = уп И 'i = 'п'
Знаки плюс и минус показывают, что двигатель может работать как в двигательном, так и в генераторном режиме.
При повороте порожнего ковша к забою (период tз) схемой управления приводом механизма подъема обычно предусматривается режим ослабления поля возбуждения двигателя, чем достигается увеличение номинальной частоты вращения двигателя на 10-20 % при спуске порожнего ковша. За расчетное усилие при спуске порожнего ковша следует принимать максимальное усилие, которое соответствует положению ковша при выдвинутой на 1/2 рукояти. Величина S'п определяется по формуле (14.3) для II положения рукояти при условии, что ковш порожний.
В этом случае мощность двигателя механизма подъема N"п определяется по формуле (14.2)
Таким образом, средневзвешенная мощность двигателя механизма подъема по предварительно построенным нагрузочной и скоростной диаграммам будет
|
|
(CB) = (Nпtк + N'п!р + N"пtз) t~l. (14.9)
Механизм напора. По аналогии с механизмом подъема для механизма напора при определении мощности двигателя за период копания tK следует принимать усилие, соответствующее положению рукояти при
р = 900 и Ур = 0.
В соответствии с формулой (14.7)
SH, aJ = P 02= (0,5+1) P 01
При этом скорость перемещения рукояти принимается равной номинальной скорости механизма напора V н' Скорость напора должна БЬ1ТЬ достаточной, чтобы за время копания (к произошло выдвижение рукояти на весь ход L. Поэтому выбранная скорость УН не должна Быть меньше YH?:.L (К' Скорость возвратного хода рукояти берется в 1,7-2 раза больше скорости напора. Следовательно, мощность двигателя напора NH за период копания определится по формуле (14.2)
При повороте платформы с груженым ковшом на разгрузку (период (р) двигатель механизма напора в основном будет работать в тормозном режиме, преодолевая сопротивления, создаваемые составляющими весов груженого ковша и рукояти, а также в некоторых случаях и составляющей усилия в механизме подъема. Усилие в механизме напора при повороте на разгрузку определяется выражением (14.7) при р 2 - О для IV положения рукояти. Подобно тому как это происходит для механизма подъема, перемещение рукояти в данном режиме также происходит при пониженных скоростях и может изменяться от УН = Ун.НОМ дО УН -= О. Среднее значение скорости, перемещения рукояти за период (р можно принять равным (0,З+О,5) Ун' Тогда мощность двигателя механизма напора N' Н за этот период определится из формулы (14.2)
При повороте платформы с порожним ковшом к забою (период tз) одной из вероятных нагрузок для двигателя механизма напора может быть нагрузка 8н.• у, создаваемая составляющими весов ковша и рукояти:
Мощность двигателя механизма напора N" н за период tз определяется из формулы (14.2) при значениях 81 = 5и.а v и У! = Ун' Тогда средневзвешенная мощность двигателя механизма напора за цикл работы
И(СВ) = (Nиtк + N'ip + N'нfз) ц1. (14.11)
Механизм поворота. Мощность электродвигателей механизма поворота одноковшовых экскаваторов зависит от ряда факторов, главными из которых являются допустимые угловые ускорения и частота вращения платформы, угол поворота платформы и момент инерции вращающихся частей экскаватора. При поворотах платформы в пределах 900 время разгона и торможения может составлять 90-95 % времени поворота и тогда лишь 5-10 % времени двигатели работают с установившейся скоростью. При углах, меньших 900, установившееся движение может вообще отсутствовать. Поэтому большое влияние на величину мощности двигателей оказывает допустимое угловое ускорение платформы, по которому производятся расчеты конструкций на прочность и раскачивание рабочего органа экскаватора (например, на карьерных экскаваторах и драглайнах угловое ускорение ограничивается величиной О, 15.;.{),2 рад/ с2).
|
|
Расчетная частота вращения платформы также устанавливается по допустимой величине углового ускорения..
Средневзвешенная мощность NB(CB) (кВт) двигателя поворотного механизма определяется выражением
N _I\IC 'w;. (' л. г +' лл)'(1 +З,,~)
В(СВ) ------------,
2'103 (tp + tз)'''в (14.12)
где J Л.Г и J лл - моменты инерции ПОВОРОТНQЙ платформы соответственно с груженым и порожним ковшом, определяемые по формуле (14.14); w3 - заданная угловая скорость (частота пз) вращения поворотной платформы; ТJв - К.П.д передачи поворотного механизма; tp' ta - время поворота платформы соответственно на разгрузку и с порожним ковшом к забою.
С учетом того, что время tp приблизительно равно времени tз, то при Kfl.K = 1,15 и 1/8 = 0,8 средневзвешенная мощность двигателя (двигателей) поворота карьерных мехлопат и драглайнов может быть определена из выражения
НВ(СВ) = 10-З(lп.г + Iп.п)ШЗ·tр-l. (14.13)
Суммарный момент инерции одноковшового экскаватора J (кг,м2) относительно оси его вращения
О = О т + О с + О к+п + О и + О Рэ (14ю14)
где Jп, Jc' JK+n (JK~' lи, !i..~ моменты инерции соответственно поворотной платформы, стрелы, ковша с породой(или порожнего ковша J к), механизма напора и рукояти относительно оси вращения платформы.
Момент инерции поворотной платформы со сторонами, равными длине L Д' ширине Lш и высоте кузова 4. платформы, относительно вертикальной оси вращения экскаватора
(О,5Lд)2 + (0,5Lш)2 л =JQ + тл'ГЪ = тл' -:l + тл'ГЪ, (14,15)
где J о - момент инерции поворотной платформы относительно вертикальной оси, проходящей через центр массы параллелепипеда, кг,м2; тп - масса платформы, кг;
тп = Кптз, (14.16)
Кп - коэффициент, равный 0,48-0,51 для карьерных мехлопат; 0,43-0,45 ДЛЯ вскрышных лопат и 0,7-0,8 для драглайнов; тз - масса экскаватора, определяемая по формуле (10.7), кг; гп - расстояние между осью
вращения экскаватора и осью, проходящей через центр массы платформы (как параллелепипеда), гп = 0,5Lд - Гп.с,
r п.С - радиус пяты стрелы, определяемый по формуле (10.8), м.
Момент инерции стрелы относительно оси вращения экскаватора с достаточной точностью может быть определен по формуле
c = тс 'Г~, (14.17)
где тс - масса стрелы, определяемая по формуле (10.6), кг; гс - расстояние от оси вращения платформы до середины стрелы, м.
Момент инерции ковша с породой
IK+n = mK+n 'Г~, (14.18)
где mK+n - масса ковша с породой, кг. Определяется суммированием выражения (10.2) или (10.4) с выражением (l 0.5); Гв - максимальный радиус разгрузки, определяемый из выражения (10.8), м.
Момент инерции напорного механизма
н=ти'Г~, (14.19)
где ти - масса напорного механизма, определяемая по формуле (10.6), кг; тн - расстояние от оси вращения экскаватора до центра тяжести механизма напора, м.
Момент инерции рукояти
= тр 'T~, (14.20)
где тр - масса рукояти, определяемая по формуле (10.9), кг; Гр - расстояние от центра тяжести рукояти до оси вращения экскаватора, м.
|
|
|
Архитектура электронного правительства: Единая архитектура – это методологический подход при создании системы управления государства, который строится...

Археология об основании Рима: Новые раскопки проясняют и такой острый дискуссионный вопрос, как дата самого возникновения Рима...

Автоматическое растормаживание колес: Тормозные устройства колес предназначены для уменьшения длины пробега и улучшения маневрирования ВС при...

История развития пистолетов-пулеметов: Предпосылкой для возникновения пистолетов-пулеметов послужила давняя тенденция тяготения винтовок...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!