

История создания датчика движения: Первый прибор для обнаружения движения был изобретен немецким физиком Генрихом Герцем...

Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...
История создания датчика движения: Первый прибор для обнаружения движения был изобретен немецким физиком Генрихом Герцем...
Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...
Топ:
Техника безопасности при работе на пароконвектомате: К обслуживанию пароконвектомата допускаются лица, прошедшие технический минимум по эксплуатации оборудования...
Комплексной системы оценки состояния охраны труда на производственном объекте (КСОТ-П): Цели и задачи Комплексной системы оценки состояния охраны труда и определению факторов рисков по охране труда...
Устройство и оснащение процедурного кабинета: Решающая роль в обеспечении правильного лечения пациентов отводится процедурной медсестре...
Интересное:
Берегоукрепление оползневых склонов: На прибрежных склонах основной причиной развития оползневых процессов является подмыв водами рек естественных склонов...
Национальное богатство страны и его составляющие: для оценки элементов национального богатства используются...
Наиболее распространенные виды рака: Раковая опухоль — это самостоятельное новообразование, которое может возникнуть и от повышенного давления...
Дисциплины:
|
из
5.00
|
Заказать работу |
Содержание книги
Поиск на нашем сайте
|
|
|
|
7.1. Состав и общая классификация
Информационное измерительно -управляющее средство (ИИУС) – электронная система программного функционирования, обеспечивающая:
1) ввод электрических сигналов подключенных датчиков и определение их показаний;
2) периодическое или циклическое выполнение программы функционирования с учетом текущих показаний датчиков;
3) вывод (генерация) управляющих электрических сигналов для исполнительных устройств,
4) возможность ввода, отладки и постоянного контроля состояния программы функционирования;
5) возможность визуализации состояния и возможность управления параметрами программы функционирования;
6) коммуникации данных по каналам связи.
Некоторые из указанные основных функций в любом составе, за исключением п.2, могут отсутствовать. Типовая архитектура (обобщенная функциональная схема) ИИУС - на рис.7.1.
ОЗУ – оперативно – запоминающее устройство
ОЗУ – постоянно – запоминающее устройство
ЦПУ – центральное процессорное устройство
Рис.7.1.Типовая архитектура информационного средства ПА
Схема реального средства может дополняться встроенными или конструктивно связанными средствами визуализации состояния функционирования, управления и ввода программы (дисплей, клавиатура, сигнальные светодиоды и кнопки). ИИУС может дополняться средствами (модулями) удаленного в/в.
Порты программирования и коммуникации, средства ввода и/или вывода электрических сигналов могут отсутствовать. В интегрально- схемном исполнении процессорная часть с универсальным последовательным коммуникационным портом, вводом 8 аналоговых и 16 дискретных сигналов выполняется в одной микросхеме.
|
|
Процессорная часть – основная часть ИИУС. Включает ЦПУ, ПЗУ, ОЗУ, часы (реального времени), сторожевой таймер и обеспечивает:
1) собор данных из средства ввода в ОЗУ и отсылка данных из ОЗУ в средства вывода;
2) обмен данными с устройством программирования;
3) периодическое или циклическое выполнение программы функционирования с учетом текущих показаний датчиков;
4) возможность ввода, отладки и постоянного контроля состояния программы функционирования;
5) коммуникации данных по каналам связи (для этой цели могут использоваться вспомогательные коммуникационные процессоры);
6) генерация меток часов реального времени;
7) начальная загрузка и исполнение команд операционной системы (ОС);
8) управление обменом с памятью.
Основные характеристики:
1) тип ОС (например, Windows СЕ, Linux, DOS, OS-9, QNX и др.);
2) наличие исполнительной среды для стандартной системы программирования (например, для контроллеров на языках стандарта МЭК 61131-3);
3) типы поддерживаемых интерфейсов (например, RS-232, RS-422, RS-485, CAN, USB, Ethernet и др.);
4) типы поддерживаемых сетей (например, Modbus RTU, Modbus TCP, Ethernet, Profibus, CANopen, DeviceNet и др.);
5) возможность подключения интерфейса оператора (например, светодиодных или ЖКИ индикаторов, клавиатуры, мыши, дисплея, трекбола и др.);
6) разрядность адресного пространства ОЗУ (обычно -8, 16, 32 или 64 бита);
7) тактовая частота ЦПУ и памяти;
8) время выполнения команд;
9) объем, иерархия и типы памяти (например, ОЗУ, КЭШ, ПЗУ, внешняя съемная флэш и др.);
10) типы встроенных функций (например, для контроллеров: ПИД-регулятор, счетчик, широтно-импульсная модуляция (ШИМ), алгоритмы позиционирования и управления движением и др.);
11) бренд производителя ЦПУ (например, Intel, AMD, Atmel и др.).
ЦПУ – обычно выполняется в виде сверхбольшой интегральной схемы (СБИС) и часто называется микропроцессором.
Основные характеристики:
1) разрядность;
2) тактовая частота;
3) архитектура;
4) наличие операций с плавающей точкой;
5) типы поддерживаемых портов в/в;
|
|
6) температурный диапазон работоспособности;
7) потребляемая мощность.
Производительность микропроцессоров с одинаковой архитектурой пропорциональна тактовой частоте.
Большинство микропроцессоров используют RISC (Reduced Instruction Set Computing) архитектуру с сокращенным набором команд одинаковой длины и большим количеством регистров. Это позволяет повысить эффективность компилятора и исполнять каждую команду за один такт.
Процессор может дополняться сопроцессорами:
1) математическим - для ускорения операций с плавающей точкой (операции типа Y = АВ + X выполняются за один такт),
2) сигнальным - для ускорения операций свертки или быстрого преобразования Фурье.
В ПА используется большое число видов микропроцессоров, от простых и дешевых 8-разрядных Atmel и Microchip до самых высокопроизводительных серии Intel Pentium, включая 2- и 4-ядерные. Причина: огромное разнообразие задач ПА и сильная зависимость цены от мощности процессора.
Обычно микропроцессоры, используемые в средствах управления ПА, на несколько поколений отстают от процессоров офисных персональных компьютеров (ПК) в связи с относительно малым объемом рынка, который не обеспечивает окупаемость разработки новых средств ПА за период смены поколений микропроцессоров.
ПЗУ (или ROM - Read Only Memory – память только для чтения) используют для хранения редко изменяемой информации (ОС, драйверы устройств, загрузчик, исполняемый модуль программы автоматизации). Обычно реализуется на элементах EEPROM (Electrically Erasable Programmable ROM- электрически стираемая и перепрограммируемая память).
Разновидностью EEPROM является флэш-память, использующая хранение заряда в высокодобротном конденсаторе, образованном плавающим затвором и подложкой МОП-транзистора. Кроме энергонезависимости ее особенность - стирание и перезапись выполняется не отдельными ячейками, а большими блоками, поэтому она получила название (flash – вспышка). Флэш-память широко используется также и как внешняя съемная память.
Недостатком всех ПЗУ является низкое быстродействие и ограниченность количества циклов записи информации во флэш-память (до нескольких десятков тысяч раз).
ОЗУ используется для хранения данных, непрерывно изменяющихся в процессе работы процессора (например, значения тегов (переменных), результаты промежуточных вычислений, диагностическая информация, массивы, выводимые на графики, данные для отображения на дисплее).
|
|
В качестве ОЗУ современные микропроцессоры используют 2 вида памяти:
1) статическая - SRAM (Static Random Access Memory),
2) динамическая - DRAM (Dynamic Random Access Memory) и SDRAM (Synchronous DRAM).
Оба вида элементов памяти теряют свое содержание при прерывании электропитания. Поэтому для сохранения работоспособности памяти при кратковременном прерывании питания используются специальное батарейное питание.
SRAM схемотехнически выполняется на триггерах с 2-мя устойчивыми состояниями, сохраняющимися неограниченно долго при наличии питания. Объем памяти равен 2 м, где М - число двоичных ячеек памяти.
Преимущество: высокое быстродействие, достигающее единиц ГГц. Недостаток: высокая стоимость, связанная с низкой плотностью компоновки триггеров на кристалле, и малое отношение емкости к цене.
DRAM схемотехнически выполняется на простых по микротехнологическому исполнению, но низкодобротных конденсаторах. Наличие относительно больших токов утечки требует периодической регенерации (перезарядки конденсаторов), занимающее до 5…10% времени работы процессора. Недостаток – малое быстродействие, не превосходящее сотен КГц. Преимущество: простота и дешевизна, поэтому наиболее распространена.
Сторожевой таймер (или WDT- Watchdog Timer) является счетчиком импульсов тактового генератора и в нормальном режиме работы процессора периодически им сбрасывается (перезапускается). Если процессор «зависает», то сигналы сброса не поступают в счетчик, он продолжает считать и при достижении задаваемого порога вырабатывает сигнал «Сброс» для аппаратного перезапуска «зависшего» процессора.
Часы реального времени (РВ) - кварцевые часы, питаемые специальной батарейкой и независимые от общего электропитания.
Быстродействие процессорной части обычно оценивают по времени выполнения логических команд, поскольку они наиболее распространены при реализации алгоритмов управления. Но часто приводится также время выполнения операций с плавающей точкой
7.2. Программирование и управление СПУ
Программирование и конфигурирование средств ПА малой информационной мощности, например, конфигурируемых контроллеров, обычно выполняется с помощью кнопок, сигнальных и индикаторных и дисплейных элементов, расположенных на лицевой панели или с помощью ПК со специальным программным обеспечением (ПО). ПК подключается к СПУ через специальный (терминальный) порт или через имеющийся порт связи (обычно порт Ethernet).
|
|
Программирование мощных информационных средств выполняется с помощью ПК и специального ПО (среды программирования, например, Unity Pro[Shneider Electric]), обладающего широкими сервисными возможностями по программированию (библиотеки типовых программ, редакторы данных и языков программирования, синтаксический и другие виды контроля и т.д.), созданию дисплейных средств визуализации и управления, отладки программы (симуляторы, анимация текста или графического изображения содержания программы, точки останова и т.д.). При отладке работы контроллеров на реальных объектах и в качестве пульта управления при соответствующих условиях эксплуатации, в последнее время широко используется компьютер формата «ноутбук».
Пульт управления
Для управления СПУ используются 2 вида средств визуализации и управления (пультов):
1) дисплейный,
2) электротехнический.
Дисплейный пульт - содержит экран с текстовым или графическим отображением информации и обеспечивает сенсорное управление СПУ. Преимущество – универсальность и удобство использования. Недостаток – необходимость защиты от условий производства.
Электротехнический пульт - содержит сигнальные (например, светодиодные) и индикаторные (например, жидкостно - кристаллические (ЖКИ)) элементы и электротехнические средства управления: кнопки, переменные резисторы и т.д.средства визуализации подключаются к выходам средств вывода, а средства управления ко входам средств ввода. Преимущество –удобство для небольших систем автоматики, возможнрость установки вблизи произвотдственного оборудования.
7.3. СПУ. Контроллеры
Контроллер – информационное средство программного измерения, управления и регулирования, содержащее или подключенное к средствам ввода электрических сигналов датчиков и вывода электрических управляющих сигналов для исполнительных устройств оборудования и обеспечивающее обмен данными с другими информационными средствами.
Виды и типы контроллеров
Для классификации огромного разнообразия существующих в настоящее время контроллеров рассмотрим их существенные различия.
Основным показателем контроллеров является число каналов в/в. По этому признаку контроллеры делятся на группы:
1) нано-контроллеры (менее 16 каналов);
2) микро-контроллеры (от 16 до 100 каналов);
|
|
3) средние (от 100 до 500 каналов);
4) большие (более 500 каналов).
По степени универсальности функционирования контроллеры могут быть:
1) универсальные, - программируемые логические контроллеры (ПЛК), программируемыми пользователем через ПК;
2) к онфигурируемые – содержат многопараметрическую, конфигурируемую пользователем программу, записанную в память изготовителем контроллера, и обеспечивают ввод или выбор (обычно из соответствующих меню) нужных параметров через специальную программу ПК или средства визуализации и управления передней панели,
3) модули удаленного в/в сигналов - содержат многопараметрическую, конфигурируемую пользователем программу в/в электрических сигналов и коммуникации данных, записанную в память изготовителем, и обеспечивают ввод или выбор нужных параметров через специальную конфигурирующую программу ПК;
4) специальные – содержат полную программу функционирования, записанную в память изготовителем.
По составу и конструкции контроллер может быть:
1) модульный - состоящий из общей корзины (шасси), в слотах (одинаковых разъемах) которой располагаются модули центрального процессора (ЦП), электропитания в/в и вспомогательные. Обычно модуль ЦП содержит порты связи (1 или 2) и картридж установки внешней памяти в виде флэш-карты. Вспомогательные модули, например обеспечивают удаленную связь через Интернет, связь с другой корзиной того же контроллера и т.д. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое число слотов для сменных модулей обычно составляет от 8 до 32;
2) модульно – м оноблочный - состоящий из конструктивно единого блока включающего ЦП, электропитание и общую корзину для модулей в/в. Блок содержит коммуникационные порты. Может использоваться терминальный порт для программирования контроллера через ПК. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое число слотов для сменных модулей обычно составляет от 2 до 8;
3) моноблочный – контроллер является единым конструктивом со встроенными средствами в/в (например, одноплатный контроллер). Встроенные средства в/в по количеству и составу могут быть проектно компонуемыми (заказываемыми у изготовителя). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
4) распределенный - с удаленными модулями в/в. Модули удаленного в/в выполняются в отдельных корпусах, соединяются с ЦП контроллера по сети (обычно по интерфейсу RS-485) и могут быть расположены на расстоянии до 1,2 км от него.
Обычно модульно-моноблочные контроллеры относят моноблочным.
Часто указанные типы контроллеров комбинируются, например моноблочный и модульный контроллеры могут быть дополнены удаленными модулями в/в, чтобы увеличить общее количество каналов.
Многие контроллеры имеют набор сменных процессорных модулей разной производительности. Это позволяет расширить круг потенциальных пользователей системы или упростить ее модернизацию без изменения конструктива контроллера.
По конструктивному исполнению и способу крепления контроллеры делятся на:
1) панельные (для монтажа на панель или дверцу шкафа);
2) для монтажа на DIN-рейку внутри шкафа;
3) для крепления на стене;
4) стоечные - для монтажа в стойке;
5) бескорпусные (обычно одноплатные) - для применения в специализированных конструктивах производителей оборудования (OEM — Original Equipment Manufacturer).
По области применения контроллеры делятся на следующие типы:
1) универсальные общепромышленные;
2) специализированные;
3) специальные:
o модули удаленного ввода/вывода;
o ПИД-и другие регуляторы;
o частотные преобразователи (ЧП);
o коммуникационные;
o роботехнические;
o управления позиционированием и перемещением;
o другие.
Обычно специализированные и специальные контроллеры являются конфигурируемыми.
По способу ввода программы функционирования контроллеры программируются и конфигурируются:
1) с лицевой панели контроллера;
2) переносным программатором;
3) с помощью временно подключаемых дисплея, мыши и клавиатуры;
4) с помощью ПК через специальный (терминальный) порт или обычный порт связи.
Контроллеры различаются по языкам программирования:
1) используются только языки стандарта МЭК 61131-3;
2) используются компьютерные языки С, С#, Visual Basic и их сокращенные модификации;
3) комбинированные - с возможностью программирования на языках МЭК и компьютерных.
Обычно контроллеры, программируемые на языках МЭК и комбинированные называют ПЛК. Контроллеры с компьютерными языками программирования часто называют или уточняют признаком - РС-подобный (PC-base) или называют компьютерами.
Не РС-подобные контроллеры, программируемые не на языках МЭК принято не называть ПЛК. Конфигурируемые контроллеры обычно называют по основной исполняемой функции избегая названия самого средства – контроллер, хотя некоторые импортные контроллеры содержат в названии слово «программный».
Контроллеры могут не содержать в своем составе модулей или встроенных средств в/в. Например, коммуникационные контроллеры, выполняющие функцию межсетевого шлюза, или контроллеры, получающие данные по связи от контроллеров нижнего уровня иерархии АСУ ТП.
Типовой состав и архитектура контроллера соответствует обычному составу ИИУС.
7.4. Принцип действия и характеристики контроллера в системах автоматизации
Выполняет циклический или периодический алгоритм, включающий:
1) ввод данных из средств ввода и размещение их в ОЗУ;
2) обработку данных по записанному в ОЗУ коду программы;
3) вывод данных на средства вывода;
4) постоянный (фоновый) мониторинг состояния контроллера;
5) постоянное обеспечение обмена данными.
Производительность характеризуется:
1) длительность контроллерного цикла (продолжительность считывания значений из каналов ввода, обработки в процессоре и записи в каналы вывода);
2) продолжительность выполнения команд (отдельно логических, с фиксированной и с плавающей точкой);
3) пропускная способность шины между контроллером и средствами (модулями) в/в;
4) пропускная способность промышленной сети;
5) продолжительность цикла опроса всех контроллеров в одномастерной сети или цикл обращения маркера для многомастерных сетей с маркером;
6) время реакции.
Длительность контроллерного (рабочего) цикла зависит от количества модулей в/в и наличия в них замаскированных (исключенных из процедуры обмена) в/в, поэтому рассчитывается для каждой конфигурации автоматизированной системы отдельно. При интенсивной математической обработке данных (например, цифровой фильтрации, интерполяции или идентификации объекта управления в режиме нормального функционирования системы) длительность контроллерного цикла существенно зависит от быстродействия процессорного модуля.
В контроллерный цикл входит также обслуживание аппаратных ресурсов ПЛК: обеспечение работы системных таймеров, оперативное самотестирование, индикация состояния, контроль времени цикла, сетевой обмен, управление многозадачностью, отображение процесса выполнения программы на дисплее и т.п.
В процессе функционирования контроллера данные, введенные из устройств в/в располагаются в его ОЗУ и в течение рабочего цикла не изменяются. Прямое чтение входа во время выполнения одного цикла не выполняется, что ускоряет процесс обработки данных и исключает непредвиденные ситуации.
В системах с распределенными модулями в/в, подключаемыми к общей промышленной сети, длительность контроллерного цикла может определяться пропускной способностью это сети, что в ряде случаев является ограничением на предельное количество таких модулей удаленного в/в.
Требования к длительности контроллерного цикла существенно зависят от области применения контроллера. При управлении тепловыми процессами длительность цикла может составлять единицы и десятки секунд и даже минуты, а в задачах управления станками она измеряется миллисекундами.При опросе датчиков температуры на элеваторе контроллерный цикл измеряется сутками.
Время реакции контроллера - интервал времени от момента появления воздействия на систему (со стороны модулей ввода или оператора) до момента выработки соответствующей реакции. Зависит от длительности рабочего цикла контроллера, которое определяется быстродействием модулей в/в и производительностью процессора.
В контроллерах для ответственных применений предусматриваются следующие функции самодиагностики:
1) обнаружение ошибок центрального процессора;
2) сигнализация о срабатывании сторожевого таймера;
3) обнаружение отказа батареи или источника питания;
4) обнаружение сбоя памяти;
5) проверка программы пользователя;
6) обнаружение выхода из строя предохранителя;
7) обнаружение обрыва или короткого замыкания (к.з.) в цепи датчика или нагрузки.
В контроллерах для систем противоаварийной защиты (ПАЗ) и сигнализации, а также для опасных промышленных объектов может быть предусмотрена возможность резервирования отдельных частей системы: промышленной сети, процессорного модуля или всего контроллера, источника питания, сетевого сервера, замкнутых контуров автоматического регулирования, модулей в/в.
Объектом резервирования обычно является наиболее ответственная или наиболее ненадежная часть системы.
Возможность горячей (без отключения питания) замены контроллера и его частей достигается одновременно аппаратными и программными средствами.
Аппаратно предусматривается независимость начального состояния устройства от очередности подачи сигналов на его клеммы в процессе замены; программно обеспечивается возможность временного отсутствия компонента системы без ее зависания или перехода в аварийные режимы.
Надежность контроллеров характеризуется
1) наработка на отказ, определяемая как отношение суммарного времени работоспособного состояния к математическому ожиданию числа его отказов в течение этого времени (ГОСТ 27.002-89), или
2) наработкой до отказа - временем от начала эксплуатации до первого отказа.
Надежность связана с допустимыми механическими перегрузками: амплитудой вибрации в требуемом диапазоне частот и допустимым ускорением при ударе.
Отказоустойчивое отключение - способность контроллера переводить свои выходы в заранее определенное состояние сразу после обнаружения снижения напряжения питания или после внутреннего отказа.
Для повышения безопасности систем автоматизации в контроллерах используются команды для установки начального состояния выходов сразу после подачи питания или в аварийном режиме. Эти состояния выбираются так, чтобы после восстановления напряжения питания или в аварийном режиме системы исполнительные устройства находились в безопасном для персонала или системы состоянии (например, в системах с нагревом безопасным является состояние отключенного нагревателя, в подъемных механизмах - состояние торможения). Наличие команд управления безопасными состояниями позволяет реализовать операцию автоматического рестарта автоматизированной системы после прерывания питания или после восстановления работоспособного состояния.
Контекст - минимальный набор значений счетчика команд и других регистров, которые должны быть сохранены для продолжения выполнения задачи после ее прерывания.
Холодный рестарт - повторный запуск контроллера после возвращения всех динамических данных (переменных в/в, состояний внутренних регистров, таймеров, счетчиков, программных контекстов) в заранее определенное состояние. Может быть как ручным, так и автоматическим.
Горячий рестарт - повторный запуск контроллера(например, после пропадания питания), выполняемый настолько быстро что все динамические переменные не успевают измениться и работоспособность восстанавливается будто останова и не было.
Теплый рестарт - повторный запуск после обнаружения неисправности питания с заранее определенным и программируемым пользователем множеством динамических данных и системным контекстом прикладной программы. Характеризуется сигнализацией состояния или эквивалентными средствами, позволяющими убедиться в том, что прикладная программа зарегистрировала прекращение неисправности питания, обнаруженное конфигурацией ПЛК в режиме пуска.
Помехоустойчивость контроллера обычно оценивается по его соответствию комплексу стандартов по электромагнитной совместимости.
Промышленные контроллеры используют гальваническую изоляцию для устранения паразитных связей по общему проводу, земле и для защиты оборудования от высоких напряжений.
Степень защиты от воздействия окружающей среды, обеспечиваемая корпусом контроллера и классифицируется ГОСТ 14254-96 Кодификация степеней защиты представлена в Приложении 2.1. Примеры корпусов показаны на рис. 6.2.
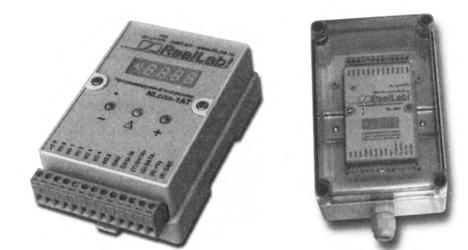
а) б)
Рис.7.2. Контроллеры в корпусах со степенью защиты IP20 (а) и IP66 (б)
При выборе контроллера желательно оценивать степень его соответствия идеологии «открытых систем», чтобы не попасть в зависимость от одного поставщика и иметь возможность модифицировать систему по мере необходимости.
Важным параметром ПЛК является время от заказа до поставки и наличие нескольких независимых поставщиков. Для России этот параметр имеет особое значение, поскольку большую долю рынка занимают контроллеры иностранного производства, для которых длительность поставки и гарантийной замены исчисляется месяцами. Большие сроки поставки объясняются как удаленностью производителя от потребителя, так и стремлением производителей и поставщиков минимизировать внутренние издержки за счет уменьшения складских запасов.
Качество пользовательской документации, наличие группы технической поддержки, скорость реакции на запросы, наличие курсов для обучения потребителей играют также важную роль при выборе контроллера из огромного их многообразия.
Технические параметры широкого спектра контроллеров различных производителей можно найти в соответствующих каталогах. Ниже приведены примеры наиболее распространенных контроллеров и их краткие характеристики.
7.5. Примеры контроллеров
Развернутый пример. Контроллер NLcon-CE (НИЛ АП)
Моноблочный, распределенный, комбинированный ПЛК выполненный на базе мощного (для ПЛК) процессора РХА-255 (Intel) для рабоы с удаленными модулями в/в через интерфейс RS-485 по протоколу Modbus RTU или DCON.
Основные отличительные характеристики:
1) соответствие идеологии открытых систем;
2) малые габаритные размеры;
3) мощный процессор;
4) большая емкость памяти;
5) широкий температурный диапазон (от -25°С или от -40 до +70°С);
6) поддержка дисплея, мыши, клавиатуры.
Архитектура контроллера представлена на рис.7.3.
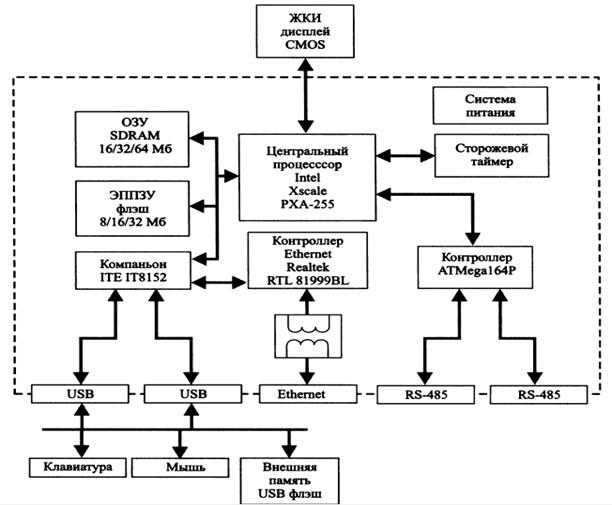
Рис.7.3.Архитектура ПЛК NLcon-CE (www.KeaILab.ru)
Центральный процессор управляет ОЗУ, ЭППЗУ, ЖКИ дисплеем и внешними портами с помощью вспомогательных контроллеров в/в исполняя ОС Windows СЕ и программу пользователя, написанную с помощью пакета CoDeSys.
Вспомогательный контроллер («компаньон») ITE 18152 управляет двумя USB портами и контроллером Realtek, который реализует стек протоколов связи Ethernet. Два порта RS-485 выполнены на основе контроллера Atmega164P с использованием 2-х UART процессора РХА-255.
ЖКИ-дисплей подключается непосредственно к ЦП с помощью плоского кабеля через параллельный интерфейс CMOS. Мышь и клавиатура подключаются к ПЛК с помощью 2-х USB портов, которые могут быть использованы также для подключения съемной USB-флэш памяти.
Контроллер выполнен полностью по идеологии открытых систем:
1) стандартный интерфейс RS-485;
2) протоколы Modbus RTU и DCON;
3) поддержка Ethernet;
4) работа под ОС РВ Windows СЕ;
5) программирование на языках С++, Visual Basic, С#;
6) программирование на пяти языках МЭК 61131-3 с помощью CoDeSys;
7) ОРС-сервер, функционирующий в среде Windows СЕ;
8) стандартная мышь и клавиатура;
9) крепление на DIN-рейку.
Основные характеристики процессора:
1) 32-разрядный с набором команд ARM версии 5ТЕ ISA, с ядром (микроархитектурой) XScale;
2) суперконвейерная архитектура процессора;
3) тактовая частота процессора 400 МГц;
4) тактовая частота системной шины 100 МГц;
5) скоростной интерфейс с флэш-памятью;
6) имеет режимы пониженного потребления;
7) кэш-память процессора емкостью 32 Кб для данных и 32 Кб для команд;
8) мини-кэш емкостью 2 Кб для обработки потока данных;
9) контроллер флэш-памяти с тактовой частотой шины 100 МГц;
10) сопроцессор для одновременного умножения двух 16-битных чисел с 40-битным накопителем. Соединен с центральным процессором 32-разрядной шиной;
11) поддержка USB v. 1.1;
12) сторожевой таймер.
Характеристики аппаратной части ПЛК:
1) два порта RS-485 и два порта USB;
2) порт Ethernet 10В ASE-Т/100BASE-T;
3) встроенная флэш-память емкостью от 128 Мб до 1 Гб;
4) SDRAM емкостью 32/64 Мб;
5) LCD (ЖКИ) дисплеи с портом CMOS (длина кабеля не более 30 см) с разрешением до 640x480:
o цветной типа TFT (Thin-Film Transistor) - 256 оттенков серого цвета или
o монохромный STN (Super-Twisted Nematic) - и глубиной цвета 64 тыс. цветов;
6) съемная USB флэш - память;
7) потребляемый ток: 600 мА;
8) влажность воздуха от 10 до 90 % без конденсации влаги.
|
|
|

Своеобразие русской архитектуры: Основной материал – дерево – быстрота постройки, но недолговечность и необходимость деления...

Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...

Индивидуальные очистные сооружения: К классу индивидуальных очистных сооружений относят сооружения, пропускная способность которых...

Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!

