5.1. Тензорезисторы
Тензорезисторы - измененяют электрическое сопротивление при его деформации приложенной силой. Используются для измерения упругой деформации твердых тел, происходящей в датчиках веса, давления, силы, перемещения, момента, ускорения, вибрации, натяжения, крутящего момента, остаточных напряжений в механических конструкциях и деталях машин после их обработки и т.д.
 Сопротивление твердого тела длиной L с площадью поперечного сечения S составляет
Сопротивление твердого тела длиной L с площадью поперечного сечения S составляет
R = pL/S, (5.1)
где р - удельное сопротивление тела.
При приложении к телу растягивающей силы F (Рис. 4.1) происходит его деформация: увеличивается длина тела на ΔL и уменьшается площадь поперечного сечения на ΔS. У большинства тел изменяется также удельное сопротивление на величину Δр. Если эти приращения малы, то логарифмированием и последующим дифференцированием обеих частей (5.1):
ΔR/ R= Δp/p + ΔL/L + ΔS/S (5.2)
Поскольку площадь поперечного сечения проводника пропорциональна его характерному поперечному размеру d то ΔS/S = 2 Δd/d и
ΔR/ R= Δp/p + ΔL/L + 2 Δd/d = Δp/p + ΔL/L(1 + 2ν) = Δp/p + ε(1 + 2ν) (5.3)
где ν = Δd/d / ΔL/L коэф-т Пуассона, для металлов равный v = 0,25...0,4; ε = ΔL/L - относительное деформация, удлинение тела. Величина ε безразмерна, но очень мала и для удобства используют такие ее единицы измерения, как мм/м, мкм/м, а в зарубежной литературе - микрострейн или микрос, равная 10-6.
У металлов удельное сопротивление меняется слабо, поэтому
ΔR/ R= ≈ ε(1 + 2ν) (5.4)
т.е. относительное изменение сопротивления линейно зависит от относительного изменения длины.
Чувствительность тензорезистора к изменению его длины характеризуется коэф-том относительной тензочувствительности GF (Gauge Factor):
GF = (ΔR/ R) / (ΔL/L) = ΔR/ R / ε (5.5)
Для большинства металлов GF ≈ 2, для платины GF = 6,1, для некоторых специальных сплавов он может доходить до 10.
Для измерения силы с помощью тензорезисторов используют закон Гука, согласно которому при упругой деформации механическое напряжение а пропорционально относительной деформации ε:
σ = К ε, (5.6)
где К - модуль упругости.
Напряжением σ называется ФВ, численно равная упругой силе F, приходящейся на единицу площади поперечного сечения тела S.
Величина приложенной силы при относительном изменении сопротивления тензорезистора:
F = S σ = SK ε.= SK (ΔR/ R) / GF (5.7)
Таким образом, измерение силы с помощью тензорезистора сводится к измерению его сопротивления или напряжения на выходе измерительного моста, которое зависит от сопротивления (5.4).
Датчики на основе тензорезисторов. Конструктивно металлический датчик на основе тензорезистора (тензодатчик) состоит из очень тонкого провода или, более часто, металлической фольги, сформированной в виде змейки (рис.4.2) и нанесенной на подложку (носитель). Подложка непосредственно приклеивается к испытываемому телу. Типовая длина тензодатчиков колеблется от 0,2мм до 10см.

 Змеевидная структура датчика обеспечивает большое относительное изменение длины фольги вдоль датчика и очень малое изменение при растяжении датчика в поперечном направлении. Поэтому коэф-т Пуассона в такой структуре минимален.
Змеевидная структура датчика обеспечивает большое относительное изменение длины фольги вдоль датчика и очень малое изменение при растяжении датчика в поперечном направлении. Поэтому коэф-т Пуассона в такой структуре минимален.
Типовые значения сопротивлений датчиков 120, 350Ом и 1 кОм. Материалом для тензорезисторов служит константан (45% Ni, 55% Си), платина и ее сплавы, нихром (80% Ni, 20%Сг), манганин (84% Си, 12% Мn, 4 % Ni), никель и др.
Для точной передачи растяжения образца через подложку на металлический проводник очень важно правильно прикрепить датчик к испытываемому образцу. Для этого лучше всего пользоваться рекомендациями изготовителей тензодатчиков.
Длина ЧЭ тензодатчика и длина его подложки изменяются в зависимости от температуры. Поэтому, несмотря на специальные меры, принимаемые при изготовлении тензодатчиков их производителями, существует проблема снижения температурной чувствительности. Она определяется 2-мя физическими явлениями:
· зависимостью омического сопротивления материала тензорезистора от температуры,
· паразитным тензорезистивным эффектом вследствие несогласованности температурных коэф-тов расширения тензорезистора и материала объекта, на который наклеен тензорезистор.
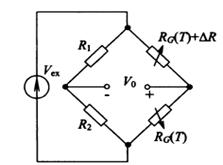
 Измерения с помощью тензодатчиков требуют регистрации очень малых изменений сопротивления. Например, относительное изменение сопротивления, вызываемое относительным растяжением 0,0005 при тензорезистивном коэф-те, равном 2, составит 0.1%, что для тензодатчика сопротивлением 120Ом эквивалентно сопротивлению всего лишь 0,12Ом. Чтобы измерять столь малое изменение сопротивления и скомпенсировать температурную погрешность, тензодатчики практически всегда используют в мостовой схеме (мост Уинстона, Рис.5.3), подключенной к источнику напряжения или тока (источнику питания моста).
Измерения с помощью тензодатчиков требуют регистрации очень малых изменений сопротивления. Например, относительное изменение сопротивления, вызываемое относительным растяжением 0,0005 при тензорезистивном коэф-те, равном 2, составит 0.1%, что для тензодатчика сопротивлением 120Ом эквивалентно сопротивлению всего лишь 0,12Ом. Чтобы измерять столь малое изменение сопротивления и скомпенсировать температурную погрешность, тензодатчики практически всегда используют в мостовой схеме (мост Уинстона, Рис.5.3), подключенной к источнику напряжения или тока (источнику питания моста).
Общепринятого стандарта для питания моста не существует. Типовыми являются напряжения 3 и 10В. Ток через тензодатчик обычно составляет от 2 до 30мА для датчиков с сопротивлением от 1кОм до 120Ом соответственно. Напряжение питания моста выбирают по возможности большим, чтобы увеличить отношение сигнал / шум, и в то же время достаточно малым, чтобы минимизировать погрешность, вызванную саморазогревом датчика. Особые требования предъявляются к точности и стабильности напряжения питания моста, если не используется 6-проводная схема подключения датчика (Рис.5.6).
Для проверки правильности калибровки измерительной схемы используют резистор с известным (калиброванным) значением сопротивления, которым шунтируют тензодатчик. Показания измерительной системы должны соответствовать расчетному значению, соответствующему этому сопротивлению.
В связи с малостью сигнала от тензодатчика во многих случаях используется режекторный фильтр с частотой 50Гц. Например, в модуле ввода сигналов тензодатчика NL-2SG (НИЛ АП) использован sinc-фильтр 3-го порядка, подавляющий помеху с частотой 50Гц на 120дБ.
Выходное напряжение измерительного моста (Рис.5.5)
V0 = R3/(R3 +RG) + R2/(R1 +R2) (5.8)

| 
|
| Активный
чувствительный
элемент
| Элемент для
термокомпенсации
|
| Рис.5.4. Использование 2-х тензорезисторов для компенсации температурной погрешности
| Рис.5.5. Полумостовая схема включения тезорезисторов для компенсации температурной погрешности
|
| | | |
При балансе моста (R1/ R2 = RG/ R3) его выходное напряжение отсутствует: V0 = 0. Малейшая разбалансировка из-за изменения сопротивления тензодатчика приводит к появлению напряжения на выходе.
Если ΔR -абсолютное изменение сопротивления тензодатчика то из (5.8) следует:
ΔR = ε RG GF (5.9)
где RG - сопротивление тензорезистора в ненапряженном состоянии.
Если сбалансировать мост таким образом, чтобы при отсутствии растяжения тензодатчика R1 = R2 и R3 = RG, то из (5.8) получим:
V0 / Vех= ε GF / 4(1 + ε GF /2) (5.10)
Таким образом, зная напряжение на выходе моста, из (4.10) можно найти относительное удлинение тензодатчика ε, а из (5.7) – действующую силу F.
Поскольку относительное удлинение зависит также от температуры, для компенсации температурной составляющей используют 2 тензочувствительных элемента, расположенных на общей подложке перпендикулярно друг другу (Рис.5.4). При этом температурные удлинения обоих элементов одинаковы, а удлинения вследствие воздействия деформирующей силы - разные. Используя эти элементы в разных плечах измерительного моста (Рис.5.6), можно частично скомпенсировать температурную погрешность.
Компенсация температурной погрешности, выполняемая изготовителем тензодатчиков, обычно приводит к ошибке не менее 10 мкстрейн /ºС. Однако, используя полиномиальную аппроксимацию температурной зависимости сопротивления для ее программной компенсации, можно снизить температурную погрешность до 1мкстрейна /ºС.
В полумостовой схеме (Рис.5.5) можно использовать также 2 тензодатчика с нескомпенсированной температурной погрешностью, если один из них работает на растяжение, 2-ой - на сжатие (например, если измеряется механическое напряжение изгибаемой балки). Таким образом можно повысить чувствительность схемы измерения в 2 раза и одновременно скомпенсировать температурную погрешность.
Дальнейшего повышения чувствительности схемы измерений можно достичь, если использовать 4 тензодатчика, 2 из которых работают на растяжение, и 2 - на сжатие (Рис.5.6).

| 
|
| Рис.5.6.Включение 2-х датчиков для компенсации температурной погрешности;
ε = -2Vr/GF Vr = (V0 – Vсм) / Vех
Vсм - начальное смещение напряжения из-за дисбаланса моста
| Рис.5.7.Использование 4-х тензодатчиков для повышения чувствительности схемы измерения и компенсации температурной погрешности; ε = - Vr/GF
|
Влияние сопротивления соединительных проводов. Сопротивления подводящих проводов. могут достигать единиц и десятков Ом, что при использовании низкоомных датчиков вносит значительную погрешность в результат измерения.
Поэтому измерительный мост обычно располагают рядом с датчиком, а сигналы с выхода моста измеряют модулями с высокоомным (потенциальным) входом. Для исключения погрешности, вызванной падением напряжения на проводах, передающих к мосту напряжение питания Veх используют 6-проводное подключение моста (Рис.5.8). В этой цепи напряжение питания моста не задается, а измеряется. Поэтому падение напряжения на проводах питания не вносит погрешность в величину Vex.
Если сопротивления проводов невозможно сделать достаточно малыми, их измеряют и учитывают в дальнейших расчетах с целью исключения вносимой ими погрешности. Соответствующие соотношения, которые могут быть программно реализованы в микропроцессоре средства ввода сигналов тензодатчиков или в компьютере приведены на Рис.5.6,7,9.

|
| Рис.5.8. 6-проводное подключение измерительного моста
| Рис.5.9.Подсоединение тензодатчика с внутренним термокомпенсирующим элементомε = -4Vr (1 +RL/RG)/GF (1 + 2Vr)
|
Составляющие погрешности измерения. При использовании тензорезисторов, большинство источников погрешностей аналогичны терморезисторным:
1) случайная погрешность, вызванная технологическим разбросом сопротивлений тензорезисторов;
2) систематическая погрешность, вызванная термоэлектрическим эффектом;
3) тепловой и фликкер-шум измеряемого сопротивления;
4) температурная погрешность, вызванная разогревом датчика протекающим током;
5) погрешность, связанная с разностью температурных коэф-тов расширения тензорезистора и материала объекта, на который наклеен тензорезистор;
6) погрешность метода (схемы измерения) сопротивления, зависящая от длины проводов и точности измерения их сопротивления;
7) внешние наводки;
8) сопротивление контактов;
9) «ползучесть» сопротивления длительно нагруженного тензорезистора;
10) погрешность измерительного средства ввода.
Вследствие очень малой чувствительности тензорезисторов особую роль играют наведенные помехи. Для их уменьшения используют не витые пары, а плетеные 4 провода, в которых попарно параллельно соединяют провода, проходящие во взаимно перпендикулярных плоскостях. Это устраняет индуктивность обычной витой пары – в виде катушки индуктивности, если смотреть на витую пару с торца.
5.2. Измерение давления в автоматизированных системах








