6.1. Общая характеристика
Средства ввода -преобразуют электрические сигналы датчиков в цифровые (информационные) сигналы для использования в средствах программного управления;
Средства вывода -преобразуют цифровые (информационные) управляющие сигналы в электрические сигналы управления исполнительными устройствами;
Средства ввода – вывода (в/в) могут быть:
1) удаленными (автономными, отдельными) с глубиной преобразования до/от информационного сигнала и соединяемыми с СПУ каналом связи,
2) модульными -информационно объединяемыми с СПУ через специальную коммутирующую панель (корзину) с разъемными соединителями,
3) встроенными – исполняемыми с СПУ в едином корпусе.
В каждой системе обычно используется по нескольку единиц различных средств в/в (например, несколько модулей в корзинах с СПУ и несколько удаленных модулей в/в). Общей характеристикой средств в/в является число каналов, которое меняется для отдельных видов средств в/в от единицы до нескольких десятков.
Существует несколько уровней и способов опроса множества каналов ввода. Каждое современное средство ввода имеет свой собственный микроконтроллер, выполняющий циклический опрос всех своих каналов и размещение полученных данных в буфер. Неиспользуемые каналы можно замаскировать (т.е. исключить их из процедуры опроса), что увеличивает быстродействие системы. При поступлении в средство ввода команды считывания, собранные данные передаются из его буфера в определенную область ОЗУ СПУ.
Опрос модулей ввода центральным процессором СПУ может выполняться циклически с одинаковой или различной для каждого модуля частотой. Второй вариант позволяет уменьшить загруженность шины обмена данными модулей ввода с СПУ, сгруппировав датчики медленно меняющихся значений физических величин по соответствующим модулям. В подобных случаях более эффективны многомастерные шины (например, CAN или Profibus), которые позволяют использовать режим подписки, при котором контроллер модуля ввода, в котором произошло изменение состояния входа, является инициатором обмена данными. Однако из-за простоты и сравнительно низкой стоимости наибольшее распространение в ПА получили одномастерные шины и циклический опрос (поллинг - от polling) средств ввода.
Если требуется выполнить одновременный опрос всех входов системы или вывести данные одновременно через все каналы вывода, то этого используются широковещательные команды, воспринимаемые и исполняемые всеми каналами в/в одновременно. После этого обычным циклическим опросом данные по очереди вводятся в СПУ.
Информационные шины, соединяющие средства ввода с СПУ могут быть последовательными или параллельными. В магистрально-модульных системах используются параллельные шины ISA, PCI, Compact PCI, PCI Express, PC/104, SpeedBus, VME и др., в модульных контроллерах – оба вида частнофирменных (нестандартных) шин. В контроллерах с распределенными (удаленными) модулями в/в наиболее распространены последовательные шины на основе интерфейсов RS-485 и CAN.
Преимуществом параллельной шины является высокая пропускная способность. Однако небольшая длина параллельной шины, ограниченная рассинхронизацией отдельных бит в передаваемом слове, не позволяет подключить к одному СПУ более 32 модулей.
Контроллеры с последовательной шиной имеют противоположные свойства и позволяют создавать большеразмерные распределенные системы сбора данных и управления.
Обмен данными со средствами в/в выполняется по адресам, обычно записываемым в ПЗУ этого средства. Иногда адресом является номер слота с модулем или положение соответствующего микропереключателя.
Средства в/в имеют гальваническую изоляцию между входными /выходными зажимами и шиной контроллера. Напряжение изоляции составляет от 2500 (реже от 500) до 4000 В.
Изоляция может быть поканальная, когда каждый канал изолирован от остальных, или групповая. Обычно используется групповая изоляция. В удаленных модулях может быть использована индивидуальная гальваническая изоляция интерфейса RS-485 каждого модуля или групповая изоляция интерфейсов нескольких модулей с помощью одного модуля развязывающего повторителя интерфейсов. Для передачи напряжения питания в изолированную часть модуля используются DC-DC преобразователи с развязывающими миниатюрными трансформаторами.
Современные средства в/в выполняют целый ряд вспомогательных информационных функций включая некоторые виды обработки вводимой информации, компенсацию температуры холодного спая термопар, линеаризацию нелинейных характеристик датчиков, диагностику обрыва датчика, автоматическую калибровку, ПИД- регулирование, ШИМ, управление движением.
Перенос части функций СПУ в средства в/в является современной тенденцией, направленной на увеличение степени распараллеливания задач управления, обеспечение независимости локальных модулей (которые по объему своих функций приближаются к СПУ) и уменьшение потока информации между параллельно работающими процессорами в средствах в/в.
6.2. Ввод аналоговых сигналов
Преобразование аналогового сигнала по существу является его измерением и выполняется единственным для каждого средства ввода (например, модуля) электронной схемой аналого - цифрового преобразования (АЦП), последовательно подключаемой электронным коммутатором к этим каналам. На преобразование затрачивается определенное время. Минимальный период времени подачи в СПУ значения каждого канала составляет продолжительность преобразования всех каналов ввода этого средства. Поэтому измерительные каналы всегда имеют ограниченную пропускную способность, а измеренные значения поступают в СПУ в дискретные моменты времени.
Разнообразие физических явлений порождает разнообразие датчиков. Для унификации (сокращения числа типов) средств ввода используют встроенные или отдельные средства нормирования выходных электрических сигналов датчиков в соответствие с ГОСТ 26.011-80 и ГОСТ Р 51841-2001. Фактически в ПА используются следующие стандартные диапазоны аналоговых сигналов: 0...10 В, 0...±10 В, 1...5 В, 4...20 мА, 0...20 мА. ГОСТ Р 51841-2001 не рекомендует применять диапазон 0...20 мА в новых разработках для обеспечения диагностики обрыва датчиков.
Модули ввода обычно имеют программно устанавливаемые для каждого канала диапазон входных сигналов из определенного состава (например, модуль NL-8TI [НИЛ АП] имеет входные диапазоны ±15, ±50, ±100, ±500 мВ; ±1, ±2,5 В, ±20 мА).
Входы могут быть:
1) потенциальными – аналоговая информация датчика содержится в уровне его постоянного выходного напряжения;
2) токовыми - информация датчика содержится в значении его постоянного выходного тока.
Входное сопротивление потенциальных входов нормативно должно быть не менее 10 кОм для диапазона 0...10 В и 0... ±10 В, не менее 5 кОм для диапазона 1...5 В. Входное сопротивление токовых входов не должно превышать 300 Ом для диапазона 4...20 мА.
Однако для таких датчиков, как термопары, терморезисторы, тензорезисторы из-за их широкой распространенности нормирующие преобразователи часто встраивают в сами средства ввода и все более широкое распространение получают достаточно универсальные конфигурируемые средства ввода.
Примером может служить состав используемых датчиков контроллеров ОВЕН, конфигурируемых по специальной программе для ПК, подключаемого к контроллерам:
| №
| Тип датчика
(сигнала)
| Диапазон
значений,°С
| РС*
| |
| TCM (Cu50)
W100 = 1.426
|
50...+200
| 0.1
| |
| ТСМ (50M)
W100 = 1.428
| -200...+200
| 0.1
| |
| ТСП (Pt50)
W100 = 1.385
| -200...+850
|
| |
| ТСП (50n)
W100 = 1.391
| -240...+ 1100
| 0.1
| |
| ТСМ (Cu100)
W100=1.426
| -50.
.+200
| 0.1
| |
| ТСМ (100M)
W100= 1.428
| -200...+200
| 0.1
| |
| ТСП (Pt100)
W100=
1.385
| -200...+850
| 0.1
| |
| ТСП (100П)
W100= 1.391
| -240...+ 1100
| 0.1
| |
| TCH (100Н)
W100 =1.617
| -60
..+180
| 0.1
| |
| ТСМ (Cu500)
W100= 1.426
| -50...+
|
.1
| |
| ТСМ (500M)
W100= 1.
| -200...+200
| 0.1
| |
| ТСП (Pt500)
W100= 1.385
| -200...+850
| 0.1
| |
| ТСП (500П)
W100= 1.391
| -250...
| 0.1
| |
| TCH (500H) W100=1.617
| -60...+180
| 0.1
| |
| TCM (Cu1000) W100=
.426
| -50...+200
| 0.1
| |
| TCM (1000M) W100= 1.4
| -200
..+200
| 0.1
| |
| ТСП (Pt1000) W100=1.385
| -200...+850
| 0.1
| |
| TCn(1000П)
W100 = 1.391
| -250
..+ 1100
|
| |
| TCH(1000H) W100=1.
| -60...+180
| 0.1
| |
| TCM (53M)
W100= 1.426(rp.23)
| -50...+200
| 0.1
|
| | №
| Тип дат
ика (сигнала)
| Диапазон
значений, °С
| РС*
| |
| термопара TXK (L)
| -200...+800
|
.1
| |
| термопара ТЖК (J)
| -200...+1200
| 0.1
| |
| термопара THH (N)
| -200...+130
| 0.1
| |
| термопара TXA(K)
| -200...+1360
| 0.1
| |
| термопара ТПП (S)
| -50...+1750
| 0.1
| |
| термопара ТПП (R)
| -50...+1750
| 0.1
| |
| термопара ТПР (В)
| +200.
.+1800
| 0.1
| |
| термопара
TBP (А-1)
| 0...+2500
| 0.1
| |
| термопара ТПР (В)
| +200...+1800
| 0.1
| |
| тер
опара TBP (А-1)
| 0...+2500
| 0.1
| |
| тер
опара TBP (А-2)
| 0...+1800
| 0.1
| |
| термопара TBP (А-3)
| 0...+1800
| 0.1
| |
| тер
опара ТМК (Т)
| -200...+400
| 0.1
| |
| ток 0...5 мА
| 0.
.100%
|
.1%
| |
| ток 0...20 мА
| 0...100%
| 0.1%
| |
| ток 4...20 мА
| 0... 100%
| 0.1%
| |
| напряжени
50...+50 мВ
| 0… 100%
| 0.1%
| |
| напряжение 0.
..1 В
| 0… 100%
| 0.1%
| | *РП – разрешающая способность, °С:
При измерении температуры
выше +999,9°С и ниже -199,9°С равн
1°С
|
|
Кроме универсальных средств аналогового ввода, в ПА используются также и средства ввода, специализированные по определенным видам сигналов датчиков.
Структура средств ввода аналоговых сигналов. Типовая структура средств удаленного ввода аналоговых сигналов на примере модуля NL-4RTD [НИЛ АП]. Функциональная схема модуля показана на рис.5.1.
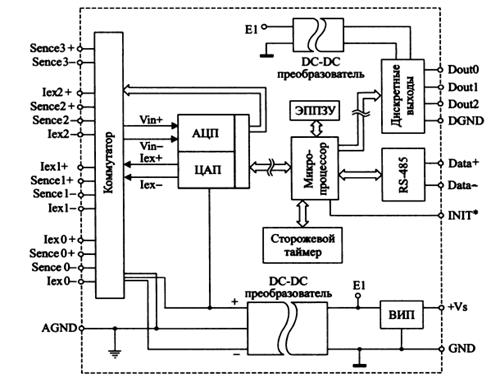
Рис.6.1. Структура модуля NL-4RTD [НИЛ АП] ввода сигналов термосопротивлений.
Основной частью модуля ввода является АЦП, использемй для ввода всех аналоговых сигналов (обычно2, 4, 8 или 16). Для подключения источников сигнала(датчиков) к АЦП используется аналоговый коммутатор на МОП-транзисторах. Ввод нескольких сигналов выполняется последовательно во времени. При необходимости одновременного ввода, используют специальные модули с поканальными АЦП.
В модулях ввода обычно используют дифференциальные входы, которые позволяют выполнить более помехозащищенный канал передачи аналогового сигнала по сравнению с одиночными (не дифференциальными) входами. Некоторые модули (например, NL-8AI(НИЛ АП)) позволяют программно задавать конфигурацию вида входов: дифференциальные или одиночные.
Входные цепи средств ввода принято защищать от статического электричества, от повышенного напряжения и изменения его полярности. Для защиты используют специальные микросхемы защиты с активным элементом в виде МОП-транзисторного ключа. При повышении напряжения выше допустимого ключ запирается, предохраняя чувствительные входы от повышенного напряжения. Сопротивление открытого МОП ключа практически не вносит погрешность в результат измерения. Для этого ключ используют либо для передачи потенциала, когда ток, протекающий через открытый ключ, пренебрежимо мал, либо для передачи тока, когда информация переносится в виде тока и поэтому падение напряжения на ключе не вносит погрешность в передаваемый сигнал.
Современная элементная база позволяет строить недорогие модули аналогового ввода с погрешностью измерений ±0,05 %, что еще 10 лет назад достигалось лишь в стационарных и дорогих вольтметрах.
Коммутацией входных сигналов к АЦП обычно управляет собственный микроконтроллер модуля. Однако эту несложную программу может выполнять микроконтроллер, входящий в состав некоторых АЦП (АЦП на рис. 6.1). Это позволяет уменьшить количество каналов гальванической развязки между аналоговыми входами и портом RS-485.
Основные функции микропроцессора типового модуля ввода:
1) реализация протокола обмена с СПУ;
2) исполнение команд СПУ для модуля;
3) реализация функций автоматической калибровки, диагностики обрыва или к.з. в цепях датчиков;
4) преобразование форматов вводимых данных (инженерный (в единицах измеряемой величины), 16-ный, в % от диапазона измерений);
5) установление скорости обмена с СПУ (для модуля удаленного в/в);
6) цифровая фильтрация входного сигнала (в некоторых модулях эта операция выполняется контроллером, встроенным в АЦП).
В постоянной памяти ЭППЗУ модуля хранятся калибровочные коэф-ты, адрес модуля, программа, таблицы линеаризации нелинейных характеристик термопар и термопреобразователей сопротивления.
Сторожевой таймер выполняет перезагрузку (сброс) микроконтроллера в случае его зависания.
Питание модуля выполняется от внутреннего стабилизатора напряжения, который позволяет подавать внешнее напряжение питания в широком диапазоне, обычно от 10 до 30 В. Большой диапазон напряжений питания очень полезен в распределенных системах, когда модули ввода могут находиться на значительном расстоянии друг от друга и поэтому падение напряжения на сопротивлении проводов питания достигает 10...20 В.
Цепи питания модулей защищаются от неправильной полярности напряжения питания и от превышения напряжения питания над допустимым значением. Защита выполняется диодами, стабилитронами, позисторами и плавкими предохранителями.
Для интерфейса RS-485 используется защита от статического электричества, от электромагнитных импульсов, от короткого замыкания и перегрева выходного каскада. Дополнительно может быть выполнена защита на позисторах и стабилитронах от повышенного напряжения в линиях связи.
В этом модуле ввода имеются каналы вывода дискретных сигналов, что позволяет реализовать также и ПИД-регулятор с широтно-импульсным (ШИМ) управлением исполнительным устройством.
Потенциальный вход. Используется для измерения напряжений и должен иметь бесконечно большое сопротивление и нулевую емкость, поскольку при подключении к измеряемой цепи он не должен влиять на ее динамические и статические характеристики.
В реальных условиях внутреннее сопротивление источника сигнала Ri1 и сопротивление открытого ключа Rк1 образуют делитель напряжения с входным сопротивлением R1 на постоянном токе и емкостью С1 в динамическом режиме (рис. 5.2,а). Поэтому полное входное сопротивление модуля ввода вносит методическую мультипликативную погрешность в результат измерения, которую всегда нужно оценивать, исходя из паспортных данных средства вода. Типовыми значениями входных параметров являются Rк1 ≈ 200 Ом, Ri ≈ 20 МОм, С1 ≈ 1 нФ, поэтому для обеспечения методической погрешности величиной 0,01 % сопротивление источника сигнала должно быть не более ≈ 2 кОм. Однако, поскольку указанная погрешность не зависит от напряжения источника сигнала, ее можно скомпенсировать в СПУ или контролере модуля ввода.
Сопротивления и емкость, показанные на рис.6.2,а, образуют фильтр низкой частоты 1-го порядка с постоянной времени Т ≈ (Rк1 + Ri) С1 ≈ 1.2мкс при Rк1 ≈ 200 Ом, Ri ≈ 20 КОм, С1 ≈ 1 нФ, (считаем, что R1 >> Ri1 + Rк1), который вносит также динамическую погрешность в результат измерения. Динамическая погрешность зависит от формы входного сигнала и может быть оценена по методике, изложенной далее.
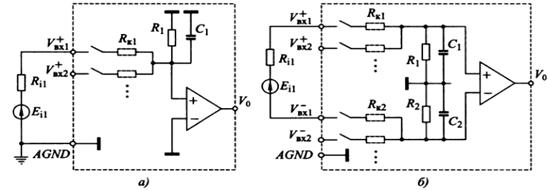
Рис.6.2. Потенциальные одиночный (а) и дифференциальный (б) входы
Для модулей с дифференциальными входами (рис. 6.2б) оценка методической погрешности делается аналогично.
Для уменьшения погрешности следует увеличивать входные сопротивления R1, R2 и уменьшать емкости C1, C2. Однако в схеме с дифференциальным включением это приведет к росту емкостной наводки, а также к увеличению синфазной помехи, вызванной входными токами операционного усилителя и атмосферным электричеством. Синфазная помеха может стать настолько большой, что напряжения на входах операционного усилителя выйдут за границы динамического диапазона. Поэтому при работе с дифференциальными входами следует соблюдать правила выполнения сигнального заземления, изложенные в гл 3хх. Вывод AGND на рис. 6.1 и 6.2 следует соединять с экраном кабеля источника сигнала или не соединять ни с чем.
Токовый вход. Преобразование тока в напряжение выполняется с помощью резистора 125, 250 или 500 Ом, с максимальным падением напряжения 2.5; 5 или 10 В соответственно. Измерительные резисторы могут быть установлены снаружи модуля ввода (на его входных клеммах) или внутри него. Для ввода полученного напряжения используется модуль с дифференциальным или одиночным входом (рис.6.3).
Измерительные резисторы могут быть прецизионными, тогда для получения точных измерений достаточно откалибровать модуль только в режиме ввода напряжений. При использовании резисторов низкой точности их погрешность можно скомпенсировать путем калибровки модуля совместно с измерительным резистором, в режиме измерения тока. Однако для этого необходимо выполнить калибровку каждого канала отдельно. Если модуль не позволяет выполнять индивидуальную калибровку каждого канала, то формулу для внесения поправок и ее коэф-ты можно сохранить в энергонезависимой (например, флеш) памяти контроллера.
При использовании диапазона 0...20 мА ток напряжение составляет V0 = R0*Ii, для диапазона 4...20 мА: V0 = 20mA * R0* (Ii - 4мA)/16мA. При этом току 4 мА соответствует выходной сигнал, равный нулю. Смещение уровня нуля на 4 мА необходимо для обеспечения возможности диагностирования обрыва в цепи датчика.
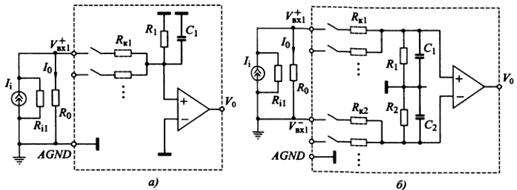
Рис.6.3. Токовый вход на основе одиночного (а) и дифференциального (б) потенциального входов
6.3. Вывод аналоговых сигналов
Аналоговые сигналы на выходе средств вывода обычно являются стандартными сигналами тока (0...20 и 4...20 мА) или напряжения (0...5, ±10 В). Эти сигналы используются для управления аналоговыми исполнительными устройствами ПА.
Структура типового модуля вывода аналоговых сигналов показана на рис.6.4.









