Рис. 6.4. Структурная схема модуля удаленного вывода аналоговых сигналов NL-4AO[НИЛ АП].
Информация поступает из СПУ обычно через интерфейс RS-485 (в некоторых модулях вывода используют другие последовательные или параллельные интерфейсы). Типичным для средств ПА является гальваническая изоляция аналоговой выходной от цифровой, включающей микропроцессор. Модуль управляется командами, посылаемыми с помощью стандартного протокола Modbus RTU или DCON.
Вывод напряжений осуществляется с помощью цифро-аналогового преобразователя (ЦАП) и операционного усилителя (ОУ). Благодаря глубокой обратной связи выходное сопротивление ОУ на постоянном токе составляет сотые доли ОМа, что позволяет с высокой точностью считать его идеальным источником напряжения. Для защиты от перегрузки по выходу используются ОУ с защитой, выполненной на том же полупроводниковом кристалле, что и сам ОУ.
Вследствие частотной зависимости коэф-та усиления выходное сопротивления каскада на ОУ rвых (f) зависит от частоты:
rвых (f) = (r0 /K0) (f1 /f) (6.1)
где f - частота, r0 – выходное сопротивление ОУ без обратной связи; f1 - частота единичного усиления ОУ, обычно равная 1 МГц; К0 – коэф-т усиления ОУ на постоянном токе (на нулевой частоте). Приведенное выражение справедливо с погрешностью около 10 % при f0 < f < 10 f1, где f0 ≈ f1 * K0 - граничная частота ОУ без обратной связи по уровню 0,702 (например, при типовых значениях r0 = 100 Ом, f1 = 1 МГц; К0 = 10 5 получим rвых = 10 -3 Ом на постоянном токе, но rвых = 1 Ом на частоте 1 кГц и rвых = 10 Ом на частоте 10 кГц.
Частотную зависимость выходного сопротивления следует учитывать при расчете уровня наведенных помех, а также методической погрешности модуля вывода, обусловленной влиянием сопротивления нагрузки на величину выходного напряжения.
Для вывода аналогового сигнала в форме тока используются источники тока на основе ОУ с обратной связью (на рис. 6.4 - каскады с выходами Iout0,..., Iout3). Принцип их действия основан на том, что ОУ с отрицательной обратной связью имеет нулевое напряжение между его входами благодаря высокому коэф-ту усиления. Поэтому все входное напряжение оказывается приложенным к сопротивлению r0 (на рис. 5.4 верхний по схеме каскад) и выходной ток равен входному напряжению, деленному на r0. Чтобы ток, протекающий через r0, был точно равен выходному току, выходным является полевой транзистор с изолированным затвором или пара из биполярного и МОП-транзистора.
Модуль комплексного выходного сопротивления источника тока rвых (f) можно найти, используя простейшую модель МОП-транзистора, учитывающую его выходное сопротивление:
rвых (f)= (Rd + r0)Sr0f1 / K0 f ≈ Rd Sr0f1 / K0 f (6.2)
где Rd - дифференциальное выходное сопротивление МОП-транзистора; S – его крутизна; остальные параметры имеют тот же смысл и порядок типовых величин, что и в (6.1). Для типовых значений этих параметров и при Rd = 100 кОм получим rвых = 5 10 11 Ом, т.е. выходное сопротивление фактически определяется сопротивлением утечек печатной платы. Однако на частоте f = 10 кГц модуль rвых = 50 МОм и далее падает с ростом частоты.

| 
|
| Рис.6.5. Выходные каскады для втекающего (а) и вытекающего (б) токов. Схема а требует дополнительного источника питания
|
Таким образом, источник тока с достаточно высокой степенью точности для всех частот можно считать «идеальным», и его выходное сопротивление можно не учитывать при использовании типовой нагрузки 250 Ом в стандартной «токовой петле» 4...20 мА.
Для питания транзистора в источниках тока, требуется дополнительный источник питания Епит, который обычно располагается вне модуля вывода (рис. 6.5).
Стабилитрон на рис. 6.5 служит для предохранения транзистора от внешних напряжений неправильной полярности и превышения напряжения над допустимым значением.
Недостатком приведенного каскада является невозможность изменения направления тока на противоположное, что связано с применением транзисторов одного типа проводимости или с одним типом канала. Более сложные 2-полярные схемы в модулях вывода для ПА не применяются.
Состав погрешности средств вывода:
1) погрешность дискретности ЦАП;
2) стабильность источника опорного напряжения;
3) внутренний шум;
4) ненулевое выходное сопротивление.
Погрешность типового модуля ввода (на примере модуля NL-4AO [НИЛ АП], составляет 0,1 % от верхней границы диапазона (±10 В для потенциального выхода и 0...20 мА для токового), разрядность - 12 бит, дискретность изменения выходной величины - 5 мВ для напряжения и 5 мкА для тока, т.е. 0,05 % от ширины диапазона.
6.4. Ввод дискретных сигналов
В системах ПА широко распространены бинарные (двоичные) сигналы, поступающие от концевых выключателей, датчиков охранной или пожарной сигнализации, датчиков заполнения емкостей, сбегания ленты на конвейере, приближения и т.п. Такие сигналы, имеющие 2 уровня (состояния) не совсем правильно называют дискретными, но этот термин прочно вошел в практику.
Модули ввода дискретных сигналов в ПА имеют несколько различных типов входов:
1) вход типа «сухой контакт»;
2) дискретный вход для логических сигналов в форме напряжения;
3) вход дискретных сигналов 110...220 В.
«Сухим» контактом в системах автоматизации называют источник информации, не имеющий встроенного источника энергии, например контакты реле или дискретные выходы типа «отрытый коллектор». Для определения состояния такого контакта необходим внешний источник тока или напряжения.
Типичная структура средства ввода дискретных сигналов на примере модуля NL-16DI [НИЛ АП]. представлена на рис.6.6.
 Микроконтроллер модуля выполняет периодическое или по запросу СПУ сканирование входов и устранение эффекта «дребезга» «сухих» контактов. Команды опроса входов, установления адреса, скорости обмена, формата данных и др. посылаются в модуль через последовательный интерфейс, обычно RS-485.
Микроконтроллер модуля выполняет периодическое или по запросу СПУ сканирование входов и устранение эффекта «дребезга» «сухих» контактов. Команды опроса входов, установления адреса, скорости обмена, формата данных и др. посылаются в модуль через последовательный интерфейс, обычно RS-485.
Конденсатор используется во входных каскадах модулей (рис.6.7,8) для фильтрации высокочастотных помех. Значение граничной частот выбирается в результате компромисса между быстродействием модуля и возможностью ложного срабатывания при воздействии высокочастотных помех. Типовое значение граничной частоты и скорости опроса входов составляет1 кГц.
Для увеличения помехоустойчивости используют также триггеры Шмидта на выходе сигналов оптронов.

| 
|
| Рис.6.7.Структурная схема входных каскадов каналов дискретного ввода
| Рис.6.8.Структурная схема входных каскадов для источников сигнала типа «сухой контакт»
|
Уровень логической единицы дискретных сигналов составляет обычно от 3 до 30В, уровень логического нуля - от 0 до 2 В. Для ввода сигналов от источников типа «сухой контакт» используют источник напряжения Еск, как показано на рис.6.8. Аналогично подключают дискретные выходы типа «открытый коллектор». Источник может быть как встроенным в модуль дискретного ввода (как, например, в модуле NL-16DI (НИЛ АП)), так и внешним.
Ввод высокого постоянного напряжения выполняется по схеме рис.6.7, однако для снижения мощности, рассеиваемой на токозадающем резисторе, используют оптроны с малым управляющим током и резистор с большим сопротивлением и большим пробивным напряжением.
Ввод дискретных сигналов 220 В. Ввод сигналов высокого переменного напряжения осуществляется аналогично рассмотренному выше (рис.5.9), однако вместо токозадающего резистора для включения оптрона используют конденсатор, чтобы снизить активную рассеиваемую мощность. Резистор 750 кОм на рис.5.9 служит для разряда конденсатора при отключенных входах, что является стандартным требованием электробезопасности. Резистор 1 кОм ограничива  ет бросок тока во момент коммутации входа. Назначение других элементов аналогично рис.6.7,8.
ет бросок тока во момент коммутации входа. Назначение других элементов аналогично рис.6.7,8.
Каскады для ввода высокого напряжения могут быть с общим проводом или независимые.
Для отображения состояния дискретных входов (включено/выключено) используют светодиоды, которые включают либо до оптрона, либо после него.
6.5. Вывод дискретных сигналов
Вывод дискретных сигналов используется для управления состоянием включено / выключено исполнительных устройств. Устройства вывода отличаются большим многообразием.
Выходные каскады со стандартными ТТЛ или КМОП логическими уровнями в ПА используются редко, поскольку нагрузкой дискретных выходов являются не логические входы электронных устройств, а чаще всего электромеханические реле, пускатели, шаговые двигатели и др. Дискретные выходы обычно строятся на основе мощных биполярных транзисторов с открытым коллектором или полевых транзисторов (обычно МОП) с открытым стоком (рис.6.10).
 Рис.6.10.Структурная схема выходных каскадов типа ОК для вывода дискретных сигналов
Рис.6.10.Структурная схема выходных каскадов типа ОК для вывода дискретных сигналов
|  Рис.6.11.Подключение индуктивной нагрузки к дискретному выходу
Рис.6.11.Подключение индуктивной нагрузки к дискретному выходу
|
По схемотехнике применения эти каскады эквивалентны, поэтому их называют каскадами ОК. Они обеспечивают большую гибкость, позволяя получить необходимые для нагрузки ток или напряжения с помощью внешнего источника питания. Кроме того, каскад ОК с помощью внешних резисторов и источников напряжения позволяет получить стандартные КМОП или ТТЛ-уровни Vвых (рис.6.10,11).
Наилучшим решением для построения дискретных выходов являются микросхемы интеллектуальных ключей, содержащих не только мощный транзистор с открытым стоком, но и цепи его защиты от перегрузки по току и напряжению, от к.з., переполюсовки и перегрева, а также электростатических разрядов. При перегреве выходного каскада или превышении тока нагрузки интеллектуальный ключ выключается.
Наиболее широко распространены выходные каскады ОК модулей вывода 2-х типов: для втекающего (рис.6.12) и вытекающего (рис.6.13) токов. Различие состоит в том, какой вывод является общим для нескольких нагрузок: заземленный или соединенный с шиной питания.
Каскады с открытым коллектором (стоком) удобны тем, что позволяют использовать внешний источник питания с напряжением, отличным от напряжения питания модулей вывода (рис.6.12,13). Кроме того, в этих схемах вместо источника питания Епит можно использовать тот же источник, что и для питания модулей вывода (Vпит).
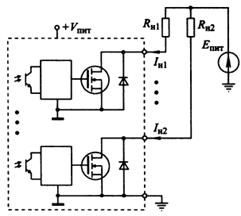 Рис.6.12. Структурная схема выходных каскадов для втекающих токов
Рис.6.12. Структурная схема выходных каскадов для втекающих токов
|  Рис.6.13. Структурная схема выходных каскадов для вытекающих токов
Рис.6.13. Структурная схема выходных каскадов для вытекающих токов
|
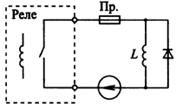 Рис.6.14.Релейный выход. Применение диода для устранения искрения контактов реле при коммутации индуктивной нагрузки
Рис.6.14.Релейный выход. Применение диода для устранения искрения контактов реле при коммутации индуктивной нагрузки
| 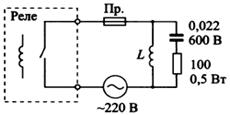 Рис.6.15.Релейный выход. Применение RC-цепочки для предотвращения искрения контактов при коммутации индуктивной нагрузки
Рис.6.15.Релейный выход. Применение RC-цепочки для предотвращения искрения контактов при коммутации индуктивной нагрузки
|
Для управления нагрузками, питающимися большим током или от источника напряжения 110...220 В используют выходные каскады с э-м или твердотельными (полупроводниковыми) реле, тиристорами, симисторами.
Основное преимущество э-м реле - очень низкое падение напряжения на замкнутых контактах, что исключает необходимость их охлаждения. Недостаток - ограниченное количество срабатываний (порядка 10 5...10 6). Полупроводниковые реле, наоборот, имеют относительно большое сопротивление в открытом состоянии и требуют отвода тепла, но могут выполнить до 10 10 переключений. Кроме того, полупроводниковые реле обладают более высокой надежностью и не имеют эффекта «дребезга контактов».
 При использовании реле для коммутации индуктивной нагрузки возникает большая э.д.с. самоиндукции, которая вызывает пробой воздушного зазора при размыкании контактов и их искрение. Это приводит к быстрому износу контактов и появлению э-м помех. Проблема решается с помощью диода, включенного параллельно катушке индуктивности при коммутации в цепи постоянного напряжения (рис.6.14) и RC-цепочкой в цепи переменного напряжения (рис.6.15). Контакты реле желательно защищать предохранителями.
При использовании реле для коммутации индуктивной нагрузки возникает большая э.д.с. самоиндукции, которая вызывает пробой воздушного зазора при размыкании контактов и их искрение. Это приводит к быстрому износу контактов и появлению э-м помех. Проблема решается с помощью диода, включенного параллельно катушке индуктивности при коммутации в цепи постоянного напряжения (рис.6.14) и RC-цепочкой в цепи переменного напряжения (рис.6.15). Контакты реле желательно защищать предохранителями.
При использовании твердотельных реле или тиристоров в высоковольтных цепях с длинными кабельными линиями используют защиту на варисторах (рис.5.16), TVS-диодах и газовых разрядниках.
6.6. Ввод частоты, периода и счет импульсов
Функции счетчика, частотомера и измерителя периода следования импульсов обычно совмещаются в одном и том же средстве ввода, используемого для решения следующих задач:
1) измерение скорости вращения вала двигателя с целью ее стабилизации или изменения по заданному закону,
2) подсчет количества продукции на конвейере;
3) измерение частоты периодического сигнала;
4) работа с датчиками, имеющими импульсный выход (например, с энкодерами - датчиками угла поворота, электросчетчиками или анемометрами);
5) автоматическое дозирование счетной продукции;
6) подсчет количества продукции, выданной со склада.

Gate - входы разрешения счета; In - счетные входы с программируемыми логическими уровнями; Dout - дискретные выходы; INIT* - вывод для выполнения начальных установок модуля; Data+, Data- выводы интерфейса RS-485.
Рис.6.17.Структурная схема модуля ввода частотных сигналов NL-2C (НИЛ АП)
Структуру типового средства ввода рассмотрим на примере счетчика-частотомера NL-2C 9(НИЛ АП) (рис.6.17). Он содержит два 32-разрядных счетчика-частотомера. Каждый счетчик имеет изолированные и неизолированные входы. Изолированные выполнены на оптроне и являются пассивными со стороны источника сигнала. Неизолированные входы имеют программно регулируемые уровни логического нуля и единицы, что позволяет уменьшить вероятность ошибочного срабатывания модуля в условиях помех. Для регулировки уровней использованы два 8-разрядных цифроуправляемых потенциометра. Для подавления помех служит также цифровой фильтр с перестраиваемыми параметрами, выполненный на микроконтроллере, входящем в состав модуля.
Для расширения функциональных возможностей каждый счетный вход модуля имеет вход разрешения счета (Gate) и источник тока для питания «сухих» контактов. Модуль имеет также 4 изолированных дискретных выхода с общей «землей».
Счетчик содержит 4 микроконтроллера, обеспечивающих:
1) исполнение команд, посылаемых из СПУ;
2) выполнение алгоритма цифровой фильтрации;
3) подсчет количества импульсов;
4) реализация протокола обмена через интерфейс RS-485.
В состав модуля входит сторожевой таймер, вырабатывающий сигнал сброса, если микроконтроллер перестает вырабатывать сигнал «ОК» (периодический сигнал, подтверждающий, что микроконтроллер не «завис»). Второй сторожевой таймер внутри микроконтроллера переводит выходы модуля в безопасные состояния (Safe Value), если из СПУ перестает приходить сигнал «Host ОК».
Схема питания модулей содержит вторичный импульсный источник питания, преобразующий поступающее извне напряжение в диапазоне от +10 до +30В в напряжение +5В для питания внутренних электрических цепей.
Модуль содержит также изолирующий преобразователь напряжения для питания каскадов вывода дискретных сигналов.
Модуль измеряет частоту в диапазоне от 10Гц до 300кГц с погрешностью ±0,0002/(f Т), где f - измеряемая частота, Гц; Т - время счета импульсов (1.0 или 0.1с).
Внешние управляющие команды посылаются в модуль через порт RS-485. Используются всего 54 команды.
6.7. Модули управления движением
Контроллеры с модулями управления движением используются в роботах, металло- и деревообрабатывающих станках, сборочных линиях, типографских машинах, в оборудовании для обработки пищи, для дозирования и упаковки, для автоматической сварки и лазерной резки, для обработки полупроводниковых пластин и т.п.
В силу специфики задачи контроллеры для управления движением занимают отдельное место, поскольку отличаются как параметрами модулей в/в, так и специализированным ПО.
Основными отличиями от модулей общего применения являются повышенные требования к быстродействию и особый состав каналов в/в, оптимизированный для задач управления движением с целью минимизации стоимости.
Типовой системой управления движением является электропривод, который является частным случаем системы автоматического регулирования с обратной или прямой связью. В состав электропривода входит электродвигатель, датчики положения исполнительного механизма, контроллер и сервоусилитель.
В электроприводах используют асинхронные и синхронные двигатели переменного и постоянного тока, шаговые, линейные двигатели, а также гидро- и пневмоцилиндры с насосами.
Электропривод обычно строится с 2-мя контурами обратной связи:
1) внутренний контур с сигналом от датчика скорости (тахометра или инкрементного энкодера) используется для управления скоростью двигателя и часто реализуется внутри сервоусилителя.
2) внешний контур с обратной связью от оси двигателя или от его нагрузки используется для управления позицией исполнительного механизма и вращающим моментом. Обратная связь от нагрузки позволяет повысить точность реализации траектории движения и использовать нежесткие механические связи, однако усложняет настройку замкнутой системы.
Сигнал обратной связи внешнего контура поступает от датчиков положения: энкодеров, резольверов, потенциометров, датчиков Холла и тахометров. Энкодеры делятся на абсолютные (определяют абсолютное положение) и инкрементные (определяют изменение положения механизма). Резольверы выполняют ту же функцию, что и энкодеры, но имеют аналоговый выходной сигнал, построены на основе вращающегося трансформатора и выдают синусоидальный и косинусоидальный сигналы, которые позволяют вычислить положение вала двигателя. Недостатком резольвера является низкое быстродействие и необходимость использования АЦП.
Сигналы обратной связи поступают в контроллер, который должен иметь специальные средства (например, модули) для ввода сигналов от указанных датчиков. В контроллер поступают также сигналы от концевых датчиков, установленных в крайних положениях исполнительного механизма. Управляющее воздействие из контроллера поступает на двигатель через сервоусилитель. Усилители имеют мощные выходные каскады с радиаторами и изготавливаются отдельно от контроллера. На их входы могут поступать аналоговые сигналы ±10В, цифровые или ШИМ-сигналы. Усилители делятся на усилители скорости, момента, с синусоидальным входным сигналом, с импульсным входом, а также гидравлические. Обычно они имеют встроенную защиту от перенапряжения, низкого напряжения, перегрева, к.з., превышения тока, потери фазы. Выбирая усилитель с нужными характеристиками, можно выполнять управление оборудованием любой мощности, от микрозондов для тестирования полупроводниковых пластин до мощных металлообрабатывающих центров.
Контроллеры могут иметь вход для джойстика или кнопок, которые позволяют управлять движением вручную.
Основным параметром модулей в/в для управления движением является число одновременно управляемых осей координат. Ось координат в подавляющем большинстве случаев ассоциируется с одним двигателем. Однако несколько двигателей могут работать на общую нагрузку, например 2 двигателя могут вращать общий вал с 2-х его концов или совместно осуществлять плоскопараллельное перемещение одной балки. В этом случае несколько двигателей соответствуют одной оси координат.
В общем случае ось координат определяется как линейная комбинация 3-х координатных осей, соответствующих 3-м двигателям, поэтому она не соответствует ни одному конкретному двигателю отдельно.
Поскольку движение в 3-мерном пространстве можно разложить на 3 одномерных, для построения любой траектории достаточно 3-х координатных осей. Однако в металлообработке часто приходится поворачивать столик с закрепленной деталью или шпиндель с закрепленным инструментом, для описания чего вводятся дополнительные оси координат. Наиболее мощные контроллеры управления движением могут синхронно управлять сотней координатных осей.
Модули в/в для управления движением оптимизированы для ввода сигналов энкодеров, резольверов, тахометров, потенциометров и концевых выключателей, а также для вывода сигналов управления сервоусилителями.
Модули ввода могут иметь следующие входы:
1) дифференциальные или одиночные входы счетчиков разрядностью 16, 24, 32 бит для сигналов энкодера;
2) дискретные входы;
3) входы прерываний процессора;
4) аналоговые входы для сигналов от резольвера и потенциометра.
Типовые модули вывода могут содержать:
1) аналоговые каналы вывода с разрядностью 12, 14 или 16 бит для управления сервоусилителями;
2) дискретные выходы (обычно с открытым коллектором);
3) цифровые выходы;
4) импульсные выходы для шаговых двигателей.
Основные параметры модулей в/в:
1) время обновления данных;
2) разрядность и число АЦП и ЦАП;
3) число дискретных и импульсных в/в;
4) емкость памяти в шагах;
5) тип и возможности ПО;
6) типы коммуникационных интерфейсов (RS-232/422, RS-485, USB, Ethernet, PCI, VME, ISA и др.).
Сигнал от инкрементного энкодера может поступать в некоторых случаях со скоростью до 20 Мбит/с, что требует быстродействующих счетчиков импульсов. В некоторых модулях используются процессоры цифровой обработки сигналов и специализированные микросхемы (ASIC).
В системах управления движением специализированными являются не только модули, но и ПО.
Примеры некоторых встроенных функций, контроллеров управления движением:
1) плавный пуск;
2) перемещение: непрерывное, абсолютное, относительное, синхронное, в контрольную точку (для калибровки и синхронизации);
3) синхронизация координат в режиме контрольных точек;
4) реализация заданной траектории движения в пространстве;
5) интерполяция: линейная, круговая, сплайнами;
6) возврат в начальное положение;
7) ручной режим управления;
8) управление зависимостью скорости от времени: трапецеидальная, S-образная (трапеция с закруглениями вместо углов);
9) автонастройка контуров регулирования;
10) отладка программы без реального привода;
11) подавление резонансных явлений (вибраций);
12) автоматическое распознавание двигателя;
13) синхронизация работы нескольких приводов (в том числе при работе двигателей на общий вал);
14) управление силой или давлением;
15) защита (от непреднамеренного запуска, при сбоях в оборудовании, при срабатывании концевых выключателей);
16) самодиагностика;
17) мониторинг текущего состояния;
18) аварийная сигнализация и аварийный останов;
19) функция таймера.
Системы управления движением воспринимают информацию от программ автоматизированного проектирования (САПР) и чаще используются с компьютерами, чем с ПЛК.
Для работы с компьютером под ОС Windows используются буферы FIFO на входе и выходе модуля, чтобы исключить неконтролируемые задержки ОС.
Контрольные вопросы
1. Общая классификация средств ввода-вывода.
2. Особенности удаленных средств ввода-вывода.
3. Особенности ввода аналоговых сигналов.
4. Общая схема ввода аналоговых сигналов.
5. Особенности ввода аналоговых потенциальных сигналов.
6. Особенности ввода аналоговых токовых сигналов.
7. Особенности вывода аналоговых сигналов.
8. Особенности ввода дискретных сигналов.
9. Особенности вывода дискретных сигналов.
10. Особенности ввода сигналов частоты, периода, счета.
11. Особенности ввода сигналов управления движением.








